基于MRAS的永磁同步电机无传感器控制系统研究
2016-05-14孟程陈国平
孟程 陈国平
【摘 要】永磁同步电机的有效控制需要可靠的转子位置信息。为了解决使用机械传感器的缺点,估算转子位置的无传感器技术已经成为近年来的研究热点。本文研究了基于矢量控制的无传感器控制技术原理和永磁同步电机的数学模型。对无传感器控制方法估计转子速度和位置电机参考自适应系统(MRAS)进行了研究。以永磁同步电机为研究对象,使用MATLAB/SIMULINK进行建模与仿真对系统进行研究。
【关键词】MRAS 永磁同步电机 MATLAB仿真
1 引言
近几年,国内外的研究将永磁同步电机无速度传感器控制方法分为三种。首先是基于电机理想模型的开环计算方法;其次是基于各种观测器模型的闭环算法;最后是以高频注入法为典型代表的基于电机非理想特性的算法。这些方法各有优缺点,适用的场合不同。目前理论研究热点主要集中在第二种。状态观测器法的实质是状态重构,这种方法具有稳定性好、鲁棒性强、适用面广的特点。本文采用了基于参考自适应(MARS)理论构造的永磁同步电动机无速度观测器基础上,运用滑模变结构控制理论设计了系统总体控制方案,论证出模型参考自适应滑模控制具有快速的响应和较强的鲁棒性。对永磁同步电动机无传感器控制的主要思想是提取可测量的物理量,然后再利用这些物理量通过适当的方式来估算转子的速度和位置,以实现电动机的闭环控制。
2 系统模型建立
为了建立永磁同步电动机的数学模型,首先进行一下假设:三相绕组完全对称;忽略了齿轮摩擦;不包括核心损耗。根据上面的假设,建立了永磁同步电动机的数学模型的d、q轴旋转坐标系方程如下:
从方程(2),可以知道控制永磁同步电动机的电磁转矩的控制从根本上取决于定制电流在d、q轴的分量。磁场定向控制(FOC)采用基于id=0,不仅由于其易执行性,与此同时,这种控制方法可以有效地抑制由电枢反应引起的退磁,并减少铜耗。对于永磁同步电动机控制,定子电流是独立于转子磁通的,并且系统简单具有良好的转矩不变性能。由于id=0,磁转转矩与正交电流iq是成线性关系的,永磁同步电动机可以看做直流电机。在SPMSM中,Ld=Lq=L,因此方程(1)和(2)可以写成
建立了磁场定向控制dq坐标系下。估计速度与给定素的相比,和差值通过PI控制器,然后可以计算出给定电流的转矩分量iq。通过调整转矩电流分量的误差PI控制器可以得出转矩电压uq。经过坐标变换后,电压信号SVPWM生成PWM控制信号,并驱动逆变桥。因此,双闭环矢量控制系统得以实现。
3 模型参考自适应系统(MRAS)方法
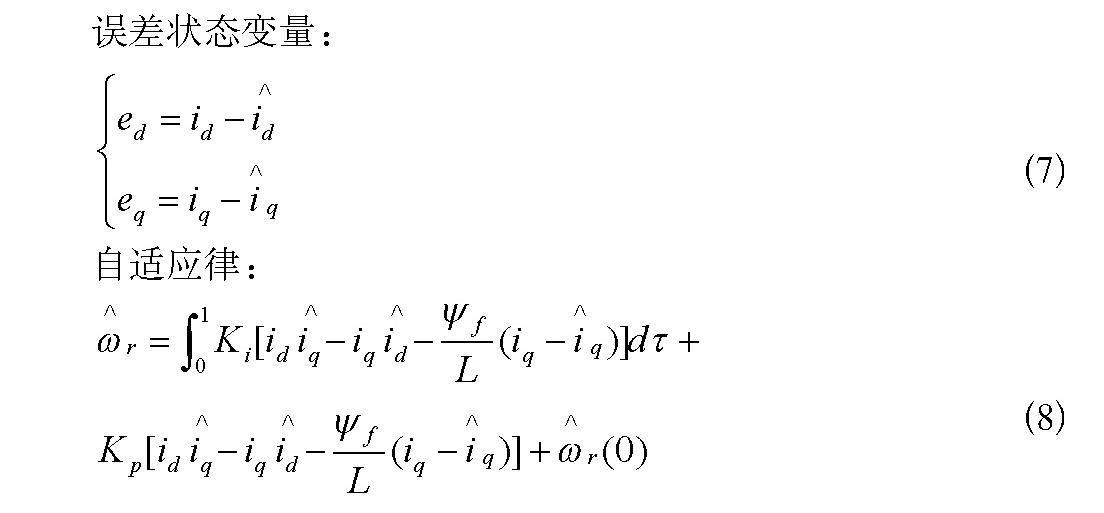
模型参考自适应控制系统的工作过程可以看成是参考模型与可调模型之间误差的调整过程。参考模型方程如下:
4 仿真模型及结果
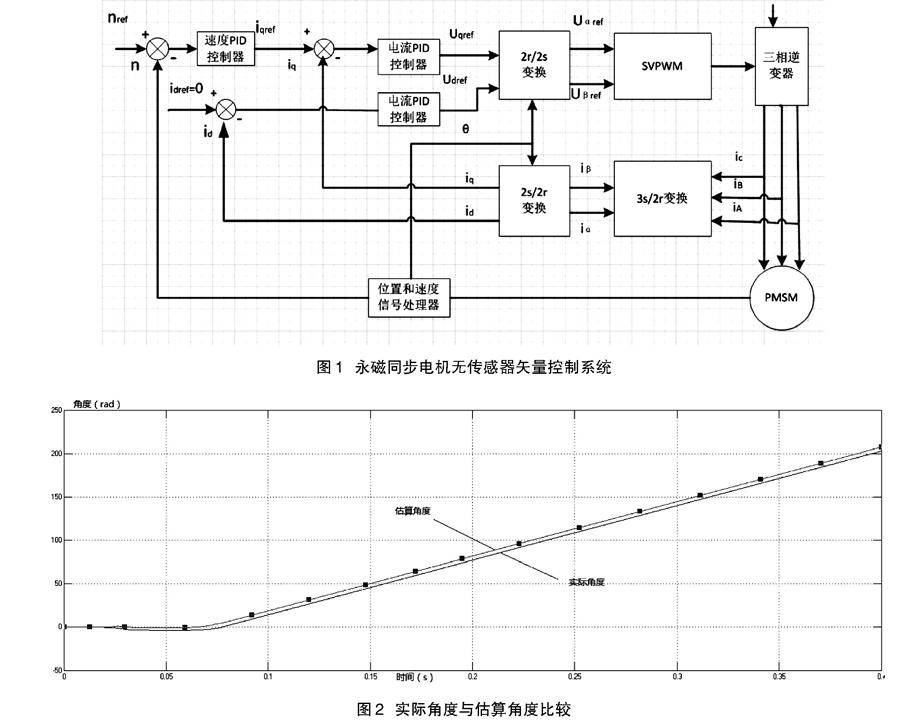
图1为基于MRAS方法永磁同步电机无速度传感器矢量控制系统。
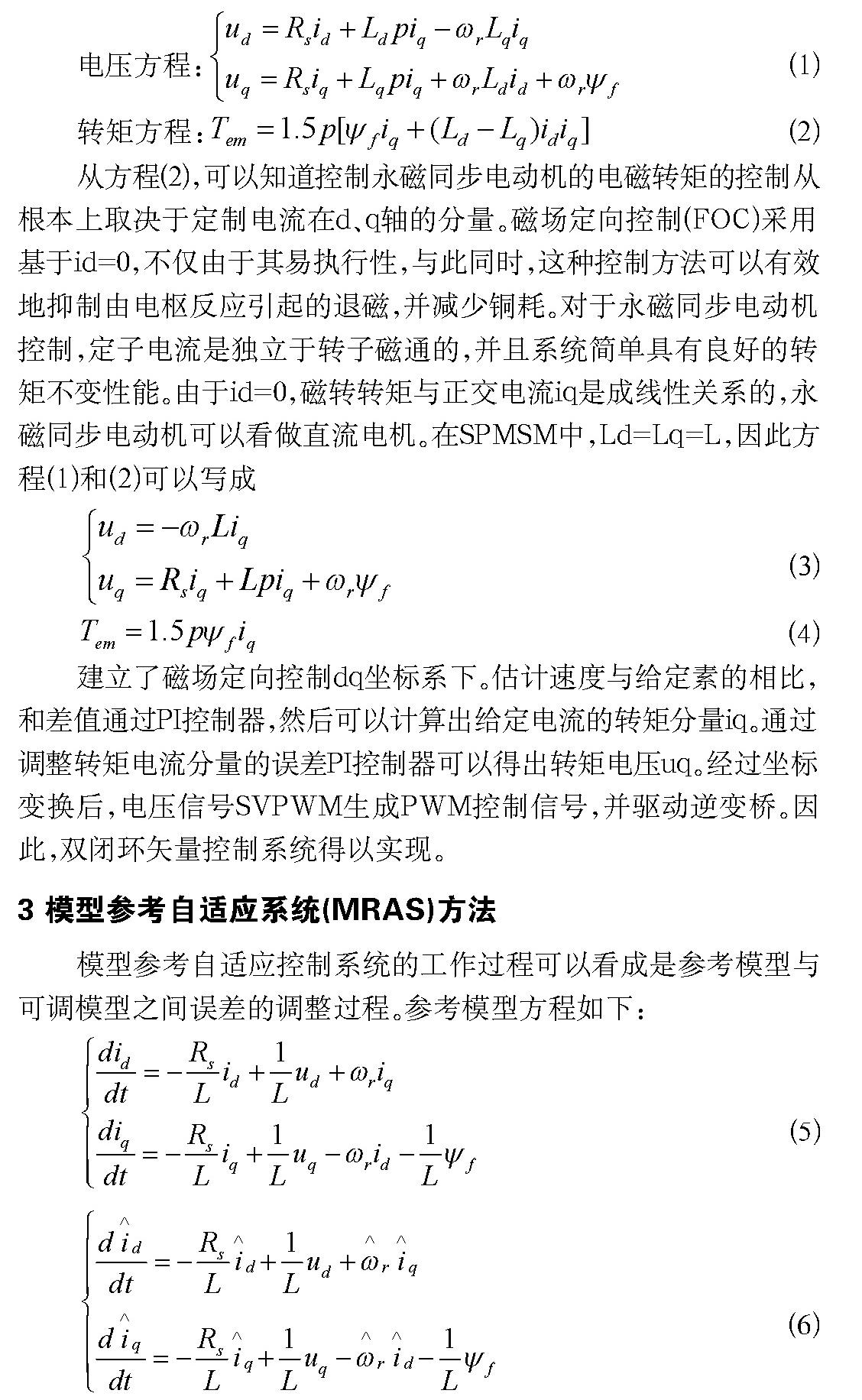
给定的速度设定在1500rpm,电机为空载启动,在0.2后负载从0N*m增加到1N*m。仿真时间为0.4s。实际角度与估算角度比较图2所示。
从波形可以得出这样的结论:MRAS方法具有良好的精度,稳定状态的稳态误差小于10rpm,约为0.6%。从电动机启动到稳定状态需要0.03s。突然加负载之后需要0.15s回到稳定状态。响应迅速。
5 结语
本文采用了基于参考自适应(MARS)理论构造的永磁同步电动机无速度观测器基础上,运用滑模变结构控制理论设计了系统总体控制方案。通过MATLAB/SIMULINK进行仿真,实验表明,该控制方法提高了电机的转速跟踪性能,具有良好的鲁棒性。
参考文献:
[1] 伊进田,李白雅,黄海. 基于模型参考自适应控制的速度估计方法[J].自动化与仪表,2008(3):9-15.
[2] 李永东,张猛,肖曦等.永磁同步电机模型参考自适应无速度传感器控制方法[C].第十二届,全国电气自动化与电控系统学术年会.2004(12):302-306.
[3] 朱自芳.全数字永磁同步电机无位置传感器控制系统研究[M].广州:华南理工大学,2008.
[4] 黄雷,赵光宙,贺益康.PMSM 的自适应滑模观测器无传感器控制[J].浙江大学学报(工
学版),2007(41):1107-1110.
作者简介:孟程(1992—),男,江苏东台人,上海理工大学硕士研究生,研究方向:电气工程。
