一种高分辨率遥感影像车辆检测方法
2016-05-14陈光门玉英翟东宇李芳吴德胜陈良超
陈光 门玉英 翟东宇 李芳 吴德胜 陈良超
摘要:高分辨率遥感影像中车辆具有不同的光谱表现,同时车辆对象往往与道路交通标志保持近似的光谱特征,这使得高分影像车辆检测通常面临较大困难。针对以上问题,提出一种基于多方向形态学变换的车辆检测方法,该方法由对象增强处理、候选对象提取、车辆对象特征验证等3个步骤构成。所提出的集成多方向线状结构元素的形态学顶帽(tophat)变换和底帽(bottomhat)变换分别实现了对亮色对象和暗色对象的增强处理,处理过程中同时顾及了车辆对象的几何结构特征,抑制了非车辆对象的干扰。基于初步提取结果,引入了基于多特征的车辆验证过程,进一步精确化车辆检测结果。基于城区高分辨率遥感影像的车辆检测实验证明了该方法的有效性。
关键词关键词:车辆检测;高分辨率;遥感影像;形态学
DOIDOI:10.11907/rjdk.161878
中图分类号:TP317.4文献标识码:A文章编号文章编号:16727800(2016)007018103
0引言
高分辨率遥感影像中,车辆目标特征描述主要包括以下几点:①位置特征:车辆的空间位置一定处于道路路面上,可根据道路范围与对象的位置关系作为车辆判别的首要条件;②几何特征:车辆几何尺寸固定,对象的长度、宽度、面积以及纵横比等几何特性反映了车辆的规格,遥感影像中,车辆对象表现为椭圆形斑点;③纹理特征:车辆表面纹理相对均一,根据车辆自身的颜色特征,其与路面背景之间的对比度强弱不一;④光谱特征:不同车辆表面颜色不同,大多表现为高亮和灰暗两类,很多车辆检测方法将其分为亮色车与暗色车两种。
高分遥感影像上的车辆特征提供了车辆检测的线索,同时也预示了遥感车辆提取的难点与复杂性:亮色车可能同高亮的车道线、交通标志混淆;亮色车因深色车窗造成图像上车身被割裂;暗色车的光谱特征易与沥青等灰暗材质的道路面混淆;暗色车辆与自身阴影邻近且不易区分。这些因素使车辆检测变得更加复杂。学者们从不同角度提出了多种车辆提取方法。S·Hinz基于上下文知识,使用差分斑点探测器检测可能存在的车辆目标;阈值分割和形态学预处理措施也常用于突出汽车特征,改善提取结果。
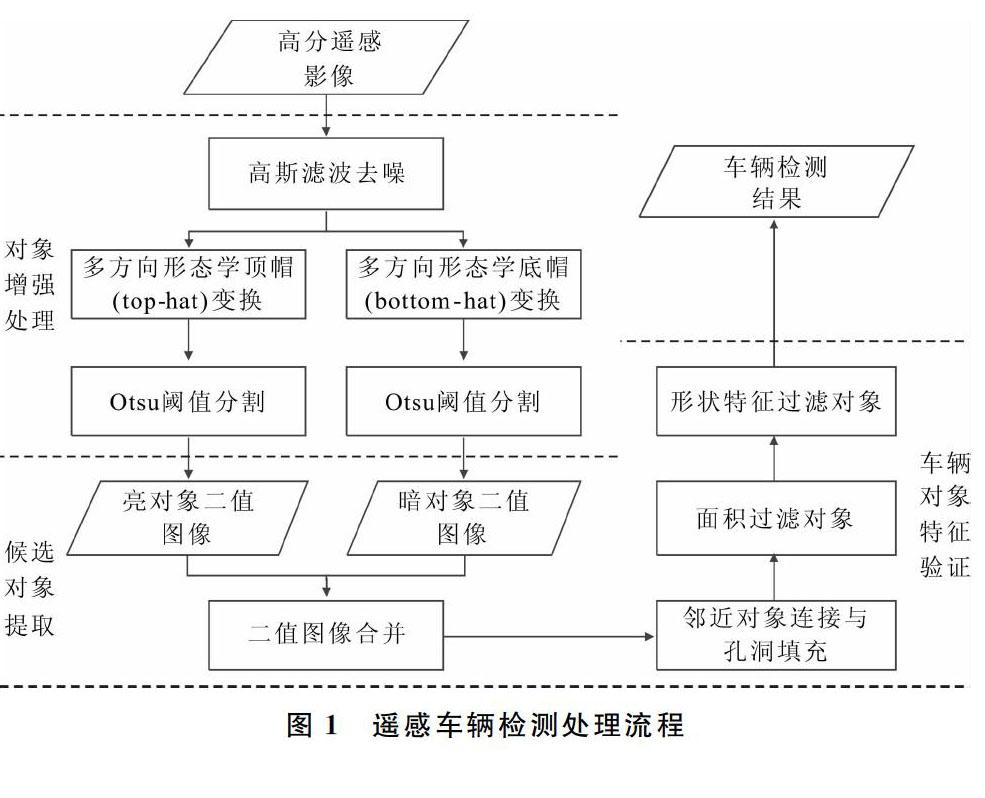
本文设计的道路提取方法包括对象增强处理、候选对象提取、车辆对象特征验证等3个步骤,流程如图 1所示。
1车辆预检测
1.1对象增强处理
考虑到车体颜色差异,需要针对亮色和暗色车辆分别进行处理。形态学顶帽(tophat)变换和底帽(bottomhat)变换能够增强图像对比度以及凸显图像中的亮色对象和暗色对象。然而,由于车辆对象为矩形,并且车身方向不固定,确定合适的形态学结构元素大小较困难:结构元素偏大,会破坏对象的结构特征,造成形状扭曲;结构元素偏小,则因无法覆盖车辆而达不到增强的目的。本研究提出集成多方向线状结构元素的形态学顶帽(tophat)变换和底帽(bottomhat)变换。
首先,按照特定角度间隔定义一系列线状结构元素,基于这些结构元素分别对影像进行形态学开闭重构运算,开重构运算用于滤除相对于背景较亮的小尺寸(长度小于结构元素)对象,而闭重构则用于滤除较暗的对象,对应的算子公式如下:
其中,f为待处理图像,R为形态学重构算子;f*=M-f,表示图像f的最大灰度级M与f中各像元相减;Θ为形态学腐蚀算子;B(d,s)表示方向为d、长度为s的线状结构元素;γref(d,s)表示对影像f执行基于结构元素B(d,s)的开重构处理结果影像;φref(d,s)表示对影像f执行基于结构元素B(d,s)的闭重构处理结果影像。如果f为多波段影像,则对各波段数据分别进行处理。
当结构元素方向与道路方向一致时,重构结果能够在保持背景光谱特征的情况下滤除前景偏亮或偏暗的对象,将基于不同方向结构元素处理得到的结果影像进行融合,保证兼顾不同方向车辆对象,融合规则公式如下:
其中,MPob(x)表示对波段b的像素x进行开重构融合值;MPcb(x)表示对波段b的像素x进行闭重构融合值,其它变量说明同上。
重构实验结果如图3(a)、(d)所示,可以看出,重构后的影像中分别滤除了尺寸短于现状结构元素的偏亮或偏暗对象。将重构后的影像与原影像作差值处理,实现对被关注地物的增强,如图3(b)、(e)所示。
其中,fb为波段b对应的单波段影像;THb为对影像fb的顶帽变换影像;BHb为对影像fb的底帽变换影像。
1.2候选对象提取
增强后的影像中,亮对象与暗对象相对于背景的反差被增强,被关注物得以凸显。分别对THb和BHb执行基于Otsu[6]的阈值分割处理,得到由候选对象构成的二值图像,如图3(c)、(f)所示。二值图像中包括车辆、阴影、建筑屋顶等,需要通过进一步的特征验证来检测车辆对象。
2车辆对象特征验证
在分析遥感影像中车辆特征时,已知车辆具有显著的几何特征,因此采用多个几何特征组合来进一步检测车辆。在验证车辆对象前,首先需要对候选对象二值图像进行预处理。根据前文分析可知,亮色车辆的车身会被前后车窗割裂。为避免检测错误,对二值图形进行形态学闭重构处理。车身结构决定了割裂后的部分均相互邻近。因此,可以根据影像分辨率和现实中车辆的尺寸确定大小合适的结构元素,并保证处理后的车体部分相互连接。
车辆对象验证选用的几何特征包括:面积、长宽比、矩形度,公式如下:
Ra=LMER/WMER(7)
Rrect=mean(A/Amer)(8)
车辆对象的判定准则如式(9)所示,要求特征值在规定阈值范围内,则判定为车辆对象,反之为背景对象。
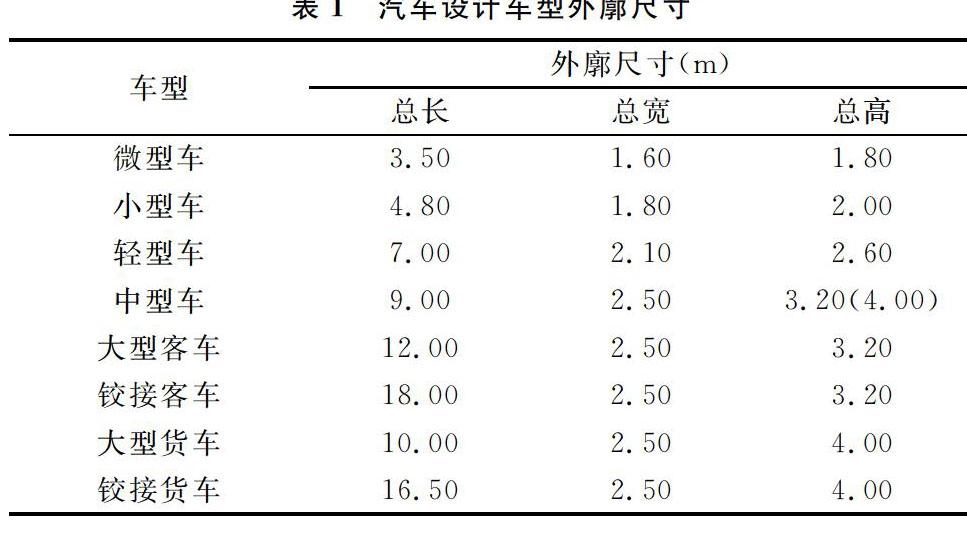
其中,Obji为对象的身份标识,当其取值为1时,标识当前对象为车辆;Ai,Ria,Rirect为第i个对象的面积、长宽比、矩形度;[TinfA,TsupA]为影像上车辆对象面积的取值范围;[TinfLW,TsupLW]为车辆对象长宽比取值范围;Trect为车辆对象最小矩形度阈值。阈值参数设置可参照汽车设计尺寸(见表 1[7])与影像分辨率。
实验区域为深圳市城区局部,该区域为闹市区,车辆密集,场景中干扰地物较多。实验数据如图2所示,数据描述信息如表2所示。
4结语
本文提出了一种基于多方向形态学变换的车辆检测方法,该方法的核心是提出了集成多方向线状结构元素的形态学顶帽(tophat)变换和底帽(bottomhat)变换,处理过程综合利用了车辆对象的光谱特征和结构特征,创新性地分别对亮色车辆和暗色车辆进行增强和检测,实现在抑制路面非车辆干扰对象的同时保留车辆对象。引入的基于多特征的车辆验证过程实现在后处理阶段对提取结果的二次验证和判别,进一步精化车辆检测结果。基于城区高分辨率遥感影像的车辆检测实验表明了本文方法的有效性。实验结果中车辆密集区域的对象粘连问题会对提取结果造成一定的影响,后续将针对此问题开展进一步研究。
参考文献:
秦彦光. 高分辨率遥感图像道路网及车辆信息提取. 长春:吉林大学, 2014.
曹天扬,申莉. 应用光照模型的交通车辆识别定位的高分辨率遥感方法[J].测绘学报,2015(1): 3945.
HINZ S, LEITLOFF J, STILLA U. Contextsupported vehicle detection in optical satellite images of urban areas\[Z\].20052937.
LARSEN S O, SALBERG. Automatic vehicle counts from quickbird images\[Z\].IEEE, 2011912.
余勇,郑宏. 基于形态神经网络的高分辨率卫星影像车辆检测[J]. 哈尔滨工程大学学报,2006, 27(z1): 189193.
OTSU N. A threshold selection method from graylevel histograms[J]. IEEE Transactions on Systems, Man and Cybernetics. 1979, 9(1): 6266.
Gb. 道路车辆外廓尺寸、轴荷及质量限值\[S\].北京:中国国家标准化管理委员会,20040401.
责任编辑(责任编辑:陈福时)
