浅析多旋翼无人机系统技术改进
2016-05-14金昱洋王智超曲以春
金昱洋 王智超 曲以春
DOI:10.16660/j.cnki.1674-098X.2016.07.013
摘 要:近年来,多旋翼无人机发展迅速,因操作简单、携带便捷、成果多样,被广泛应用于国家发展建设的多个领域。该文从多旋翼无人机全系统出发,依次提出了动力系统、机体主要承力部件、后期数据处理、信道通信和任务云台等方面限制多旋翼无人机发展的诸多瓶颈问题和现有不足,并针对以上问题进行具体分析和技术研究,同时提出技术改进意见。
关键词:多旋翼无人机 发展瓶颈 技术改进
中图分类号:V27 文献标识码:A 文章编号:1674-098X(2016)03(a)-0013-04
Technological Improvement of Multi-Rotor UAV
Jin Yuyang Wang Zhichao Qu Yichun
(61206 troops,Dalian Liaoning,116023,China)
Abstract:Recent years, multi-rotor Unmanned Aerial Vehicle develops fast and has a wide range of applications in national development and construction. Aiming at a series of developing bottlenecks of multi-rotor UAV, this paper expounds technological researches and puts forward suggestions of dynamic system, main load-bearing components, post data processing, channel communication and pan-tilt platform for improvement.
Key Words:Multi-rotor UAV; Developing bottlenecks; Technological improvement
多旋翼无人机具有完成任务多样、体积小、重量轻、方便携带和运输等优点。该型无人机可以拍照、摄像,成果可以生成三维模型、正射影像,还可以通过后期软件进行成果的二次应用[1]。但在多旋翼无人机迅速发展的同时,诸多制约发展的瓶颈问题愈发的凸显,这些问题将在该文列举和分析,并提出改进意见。
1 动力系统
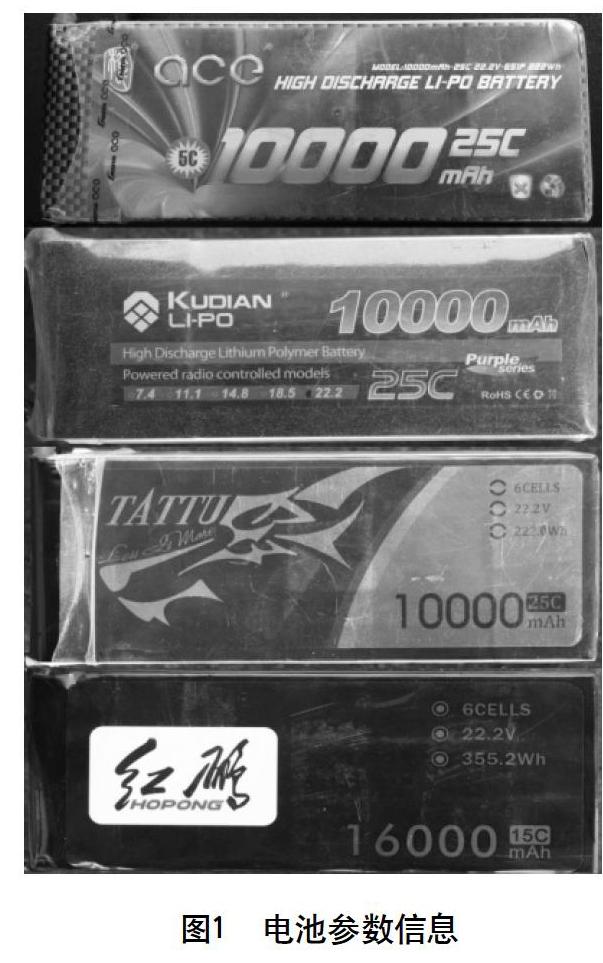
多旋翼无人机均采用电池供电,续航时间是20~50 min,挂载1 kg以上的任务云台,飞行时间会明显减少至15~30 min。如图1所示多旋翼无人机的4种通用电池。
多旋翼无人机依据目前的技术水平只能采用电池供电,通过电池带动高性能电机和螺旋桨旋转,以产生足够飞机飞行机动的动力。目前电池供电的问题是飞机滞空时间短,这个问题制约了飞行效率,只能依靠多架次的飞行来弥补。
1.1 增大电池容量的可行性分析
(1)从安全层面考虑,大容量电池现在受到多重制度管制,公共交通运输工具不允许携带容量大、放电能力强d的电池;一般电池生产厂家也不允许生产过大容量的电池,所以从制度层面是不可行的。
(2)增大电池容量会线性增加电池的重量,进而直接增加飞机的起飞重量,飞机的起飞重量一旦增加,续航时间就会显著缩短。
所以,简单的增大电池容量是不可行的。
1.2 采用燃油动力系统的可行性分析
化石燃料热值高,作为燃料会极大地增强飞行器的续航能力,然而多旋翼飞机很难像固定翼飞机一样采用化石燃料提供动力。原因在于,固定翼飞机以燃油产生的能量需要通过1套或2套传动装置带动螺旋桨旋转,进而产生飞行动力。多旋翼飞机,以六旋翼飞机为例,如果采用燃油发动机,就需要6套传动装置同时连接发动机获取动力,进而带动6个螺旋桨旋转产生飞行动力。多套传动装置的重量极大地增加了起飞重量;传动过程中齿轮间摩擦带来的能量损耗极大地降低了发动机的工作效率,所以,燃油发动机做了大量的额外功、效率低下,同时也无法满足无人机小型化的发展趋势[2]。
综合以上的分析,动力系统的改进必须依靠高性能电池的发明和生产,重量轻、容量大的电池必然会带来多旋翼无人机领域的革命。
2 机体主要承力部件
飞机材料的受力强度是检验飞机性能是否可靠的重要指标,也是飞机能否安全飞行的重要保障[3]。飞机的强度主要体现在电机的强度,电机与飞机臂连接座的强度,飞机机体的强度,这3个位置是飞机飞行的主要受力部位。以上部位一旦出现问题,飞机轻则降落受损,重则坠机。
2.1 影响电机强度的因素
2.1.1 电机旋转不共面对电机强度的影响
电机经过一段时间的使用会出现转子松动,使电机的旋转不在同一平面上,导致螺旋桨做额外功,降低工作效率,还会导致转子与电机周边发生磨损,使电机越旋转越不共面,越工作效率越低。所以,电机质量是非常重要的,而且飞机在每次飞行前都必须对电机进行共面检查。
2.1.2 电机安装不水平对电机强度的影响
电机的安装是无法保证绝对水平的,旋转着的不水平的电机产生的升力不是垂直向上的,会产生较大的水平方向的分力,飞机的飞行控制系统就会自动调节,6个电机的转速,使飞机整体时刻保持平衡状态,这种调整就会使各电机的转速明显不一致。长期地转速不一致和螺旋桨不水平旋转会导致个别电机出现转子松动的现象。
综合以上两部分的分析,多旋翼飞机的一个优化方向就是出厂前应该做好电机的水平调整,并且一旦调整水平就紧固。用户在使用时只需组装螺旋桨,不需要调整电机和电机座,这样提高工作效率的同时也延长了飞机电机的使用寿命。如图2所示,飞机每一次飞行前需用水平尺调整电机水平。
2.1.3 电机转速不一致对电机强度的影响
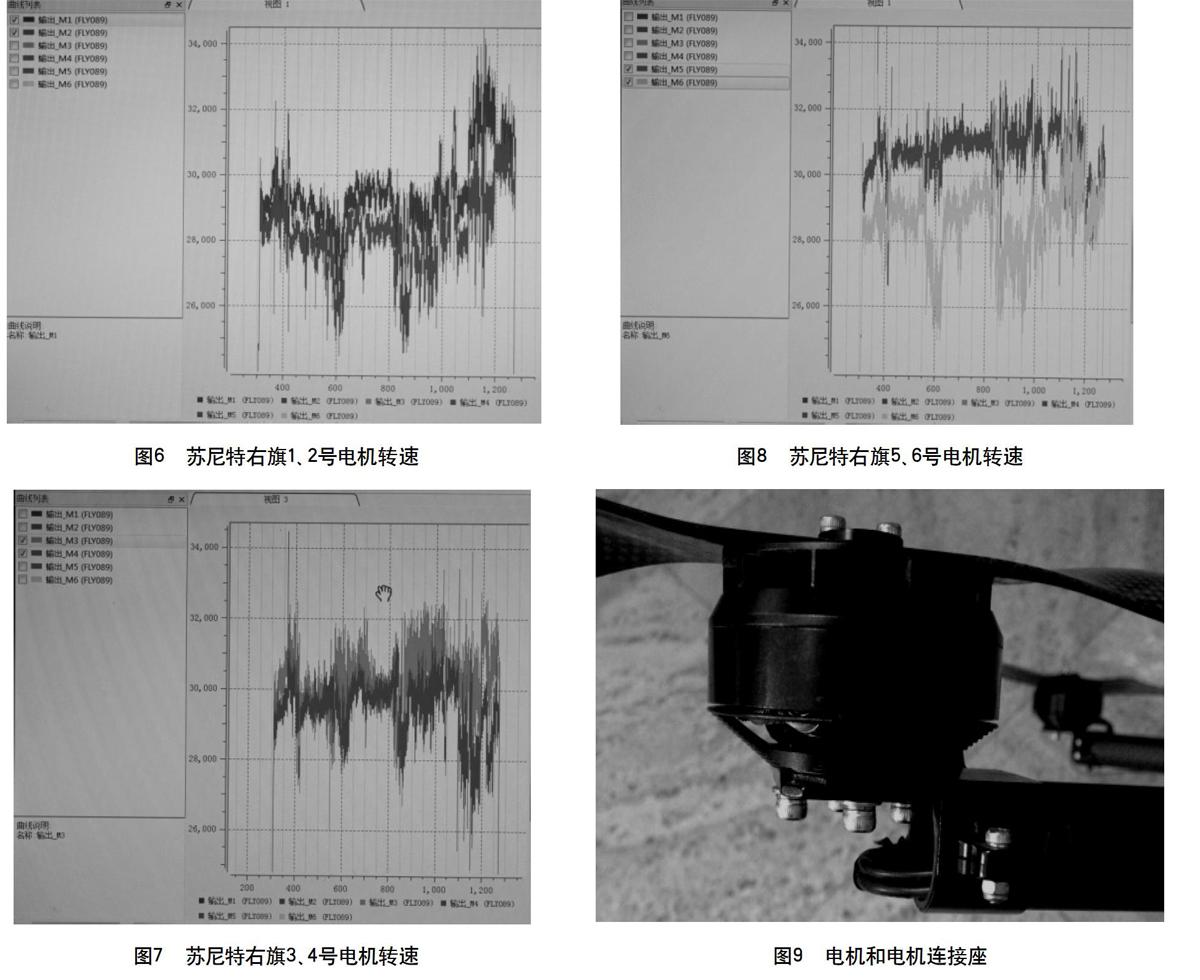
多旋翼飞机为了保持飞行的平衡,避免陷入自旋状态,电机的排序是按照顺时针、逆时针交替分配的,在飞机飞行时共同产生向上的升力,相互抵消产生的水平分力[4]。但是根据实际飞行经验,逆转电机与顺转电机的转速是不相等的,而且始终是逆时针旋转电机的转速要快于相应的顺时针旋转的电机,每一个架次的飞行统计数据均呈现这样的规律,而且纬度越高这种差异会呈现变大的趋势。地球自西向东的自转对高速旋转的电机产生微弱的影响,而且这种差异肉眼不可见,只能通过数据分析。(见图3~图8)。
图3、4、5和图6、7、8分别为多旋翼无人机在辽宁省大连市(北纬39°)和内蒙古自治区苏尼特右旗(北纬42.4°)两次飞行的电机转速数据,横轴为时间,竖轴为电机转数。图3、6为1号、2号电机的转速数据,图4、7为3号、4号电机的转速数据,图5、8为5号、6号电机的转速数据。其中1、3、5号电机为逆时针旋转电机;2、4、6号电机为顺时针旋转电机,电机按照由1~6的顺序,逆转顺转交替排序。据图分析,在这两地各逆转电机均要快于相应的顺转电机。在北纬39°地区,逆转电机平均比顺转电机每分钟快500~1 000 r;在北纬42.4°地区,逆转电机平均比顺转电机每分钟快1 000~2 000 r,差距十分明显。
由此可以得出结论:在北半球,逆转电机比顺转电机转速高,纬度越高,顺逆转速的差值越大,在北极这种差异会达到最大;在赤道,差值为零,即顺、逆转电机转速会大致相当。在南半球,这种情况会刚好反过来,顺转电机转速会快于逆转电机,而且越靠近南极,差值越大,越靠近赤道,差值越小。
所以,顺逆旋转的电机经过一段时间的使用,其磨损程度是不同的,在北半球使用多旋翼无人机要尤其关注逆时针旋转电机的磨损,并注意保养和更换。
2.2 电机连接座的强度
机身与电机连接座是飞机的重要承力部件,这些部件直接保障着飞机的飞行质量,一旦损坏,飞机就无法完成飞行任务。多旋翼无人机的一个技术优势就是:一个或不是同一侧的两个电机损坏、飞机机臂损坏或电机连接座损坏,只要损坏的部分不影响其他电机的旋转,飞机都能够通过飞控系统自动保持姿态平衡,进行迫降,从而可以极大地减少装备损毁(见图9)。
飞机的技术优势不能够代替材料的强度,依然要从制作工艺和材料的选择上,选择并制造质量轻而且强度大的电机连接座。
2.3 飞机机体的强度
现在的多旋翼无人机的机体采用铝钛合金和碳纤维材料[5],质量轻、强度大,体现出了卓越的性能,非常适合多旋翼无人机。目前机体材料已经发展到较高水平了。
3 后期数据处理
无人机航摄飞行可以获取像片、视频两种重要的一手资料,一手资料通过数据处理目前可以得到真三维模型、影像图(包括彩色影像、彩红外影像、黑白影像等等)和剪辑视频等后期成果,个别性能较好的软件可以在以上成果的基础上进行分析、判读、决策等更高级别的二次应用。
现在市场上使用的无人机航摄飞行数据处理软件均为国外生产的,我国目前还没有成熟的而且具备自主知识产权的数据处理软件。
国外的数据处理软件,数据处理的周期依然较长。如果快速获得数据成果就需要牺牲成果质量;如果需要得到高质量的成果就需要大量的数据处理时间。现在还不能够实现高质量成果的快速处理。
4 信道通信
4.1 通信频率
目前我国多旋翼无人机支持的点对点传输频率是2.4 GHz和5.8 GHz,而飞机遥控器与飞机之间、地面站与飞机之间都是点对点进行传输的[6]。为了节约制造成本,飞机生产厂商在飞机与地面站和遥控器之间都统一采用2.4 GHz或5.8 GHz的通信频率,而且频率范围接近。一般遥控器的信号发射功率要远大于地面站的电台,在实际飞行过程中,如果遥控器与地面站相距较近,遥控器会直接抢占并干扰地面站频率,导致飞机与地面站失联,使地面站无法实时监控飞机飞行状态,增加飞机飞行的安全隐患。
两种通信之间应当避免频率范围过近,甚至有交集,调整二者通信频率使之产生一定的间隔,就可以有效地避免地面站与飞机失联的情况发生。
4.2 通信功率
在有复杂电磁环境或有较强磁干扰的区域执行飞行任务时,飞机容易出现与遥控器、地面站双失联的情况,造成失联返航或失联迫降的情况发生,导致无法执行任务或飞行事故。所以,增强天线的发射功率、强化各信道通信的抗干扰能力是完成复杂电磁条件下飞行的重要保证。
5 任务云台
目前来讲,多功能集成平台只能满足一般摄影需求,无法满足测绘等更高级别应用需求。拍摄精度高、成果质量好的任务云台一般功能比较单一,只能拍照或是摄像,不能同时具备拍照、摄像和实时传输等功能,通常根据专项任务挂载专项平台,所以,完成任务能力大大受限。
云台需要同时集成拍照、摄像和数据实时传输等功能,而且精度高、体积小、重量轻、抗撞击、具备防雨能力。这种综合性、通用性的任务云台,会是未来多旋翼无人机云台的重要发展方向[6]。
多旋翼无人机的任务云台还可以根据任务的需要进一步携带科技含量更高的遥感器,比如:合成孔径侧视雷达、红外线热成像仪、高清夜视仪、多光谱扫描仪等等,为完成多样化的任务提供了可能。
6 结语
该文结合使用多旋翼无人机的经验和体会,从多旋翼无人机的动力系统、机体主要承力部件、后期数据处理、信道通信以及任务云台等几个方面列举分析了制约多旋翼无人机发展的瓶颈问题,探讨研究了技术改进方法,为多旋翼无人机下一步的发展具有较强的指导和借鉴意义。
参考文献
[1] 聂博文,马宏绪,王剑,等.微小型四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007,14(6):113-117.
[2] (美)Paul Gerin Fahistrom.无人机系统导论[M].北京:国防工业出版社,2012.
[3] WangW,SuzukiS,NonamiK.Fully autonomous quadrotor MAV and flying performance with complete embedded system[C]//Proceedings of the 9th International Conference on Motion and Vibration Control.2008.
[4] 李军伟,崔师,李连强.基于模糊PID的无刷直流电机控制系统设计开发[J].机械设计与制造,2013(2):77-79.
[5] 王伟,马浩,徐金琦,等.多旋翼无人机标准化机体设计方法研究[J].机械设计与制造,2014(5):147-150.
[6] 昂海松.微型飞行器系统技术[M].北京:科学出版社,2013.
