分布式POS时间同步算法及软件设计
2016-05-14贾黎冬李建利叶文白立建
贾黎冬 李建利 叶文 白立建
摘 要: 分布式POS是一种基于惯性/卫星组合技术的柔性基线多节点高精度时空测量系统,是多任务航空遥感载荷高精度成像的关键装置。为了实现分布式POS系统高精度数据融合,该文设计了分布式POS数据采集以及数据融合的时间同步算法,设计分布式POS传递对准算法,编写分布式POS数据处理电路软件,并对算法进行车载实验验证。实验结果表明,分布式POS时间同步算法实现了分布式POS各节点位置、速度、姿态信息的高精度测量。
关键词: 分布式POS; 多传感器; 数据融合; 时间同步
中图分类号: TN911?34; V243.5 文献标识码: A 文章编号: 1004?373X(2016)08?0001?05
Design of time synchronous algorithm and software for airborne distributed POS
JIA Lidong, LI Jianli, YE Wen, BAI Lijian
(Key Laboratory for Inertial Technology, Beihang University, Beijing 100191, China)
Abstract: The distributed POS is a flexible baseline multi?node high?precision measurement system based on SINS/GPS integrated navigation technique. It is a key high?accurate imaging device for multitask airborne loading remote sensors. For high?precision data fusion of the airborne distributed POS, a time synchronization algorithm for data acquisition and data fusion of the distributed POS is proposed in this paper. A transfer alignment algorithm was designed. The software of data processing circuit for the distributed POS was compiled. The vehicle?mounted experiment was carried out to validate the algorithm. The experiment results show that the proposed time synchronization algorithm realized the high?precision measurement of multi?modes position, velocity and attitude for distributed POS.
Keywords: distributed POS; multi?sensor; data fusion; time synchronization
0 引 言
机载对地观测系统是以飞机为观测平台,利用成像载荷获取地球表层大范围、高精度、多层次空间信息的一种尖端综合性技术[1],随着高分辨率航空遥感技术的发展,新型航空遥感系统如基于同一飞行平台的高效多任务载荷联合成像系统、阵列天线SAR系统逐渐成为提高航空遥感成像效率和分辨率的有效手段,由于多个或多种观测载荷安装在飞机的不同位置,迫切需要开展分布式位置姿态系统(Position and Orientation System,POS)研究,解决多个成像载荷时空信息精确测量难题[2]。分布式POS是一种基于惯性/GPS(Global Positioning System)组合及传递对准技术的柔性基线多节点高精度时空测量装置,已成为航空遥感的关键技术之一[3?4]。
对于同一载机的多种或多个观测载荷,采用传统的单一POS显然无法满足不同安置点多载荷的高精度运动参数测量的需求,而且因体积、重量、成本等因素的限制,在各观测载荷处均安装一个高精度POS也不现实。因此,迫切需要建立起高精度分布式POS系统[5]。较为可行的分布式POS系统由一个高精度主POS和多个子惯性测量单元(Inertial Measurement Unit,IMU)组成。其中子IMU依靠主POS高精度位置、速度、姿态等运动参数对其进行传递对准实现子IMU运动信息精确测量。
本文设计了分布式POS数据采集以及数据融合两个层次的时间同步算法,进行了分布式POS数据处理计算机的软件设计,为验证算法有效性,进行了车载实验验证。实验结果表明,本文所设计算法实现了分布式POS的基本功能,能够测量主/子节点高精度位置、速度、姿态信息。
1 分布式POS组成及特点
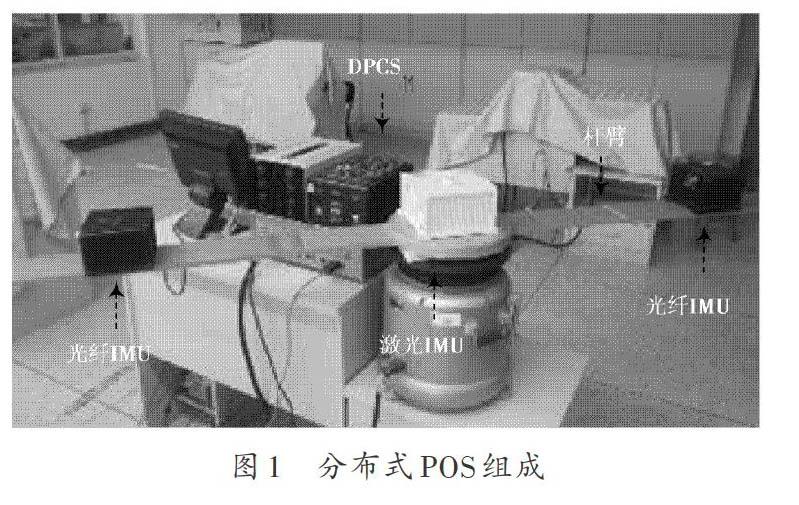
机载分布式POS由安装在机体中轴上的主POS和对称分布在两侧机翼下方的两个子IMU构成。如图1所示,主POS由一个高精度的主IMU,GPS天线以及安装在机舱内的数据处理计算机组成,其工作原理与传统单一POS相同,由数据处理计算机将GPS数据与主IMU惯性导航数据进行卡尔曼滤波,输出主节点高精度的位置、速度、姿态信息。子IMU利用传递对准技术,将主POS的实时导航结果与自身惯性导航数据融合,获取子节点高精度的位置、速度、姿态信息。
分布式POS是典型的多传感器测量系统,相比于传统单一POS,更多的传感器数量带来了更复杂的时间同步问题;此外,子IMU需要利用传递对准技术,将杆臂补偿后的主POS实时导航结果与自身惯性导航数据进行传递对准,完成子节点位置、速度、姿态信息的获取。本文的分布式POS系统由一台分布式POS处理计算机(Distributed POS Computer System,DPCS),GPS天线,一个主IMU和两个子IMU组成。主IMU为高精度环形激光陀螺(Ring Laser Gyroscope,RLG)IMU,子IMU为FOG(Fiber Optic Gyroscope,光纤陀螺)IMU。DPCS完成3个IMU与GPS数据接收、时间同步、导航解算、数据输出功能,其核心是分布式POS数据处理电路。
为满足分布式POS系统短时间超高精度,必须实现对运动参数的高频解算、高精度滤波组合[6],因此需要数据处理电路具有高速的运算能力和高精度的处理能力[7]。分布式POS数据处理电路采用了大规模FPGA芯片与6片高精度浮点DSP芯片符合使用的架构方案。
FPGA芯片用于完成3个IMU的陀螺和加速度计脉冲数据和GPS数据缓存,并通过逻辑控制完成管理和调度整个数据处理电路的工作进程;DSP是数据处理的核心,6片DSP采用两两并行主从处理器架构,包括3个主DSP处理器和3个从DSP处理器,分别完成3个IMU的导航解算。
本文设计了一种分布式POS时间同步算法,并设计了分布式POS数据处理电路软件。该软件接收主IMU、两个子IMU和GPS提供的原始信息,并完成数据预处理、时间同步、初始对准、捷联解算、组合滤波、传递对准、数据发送等任务,实现了分布式POS主/子节点高精度位置、速度、姿态信息的测量。
2 分布式POS数据采集时间同步算法
区别于传统单一POS,分布式POS具有更加复杂的结构,其数据融合算法在初始对准、捷联解算、组合滤波的基础上仍需要考虑更加复杂的时间同步算法以及传递对准问题。
对于分布式POS这样的多传感器组合导航系统,各传感器在不同时刻获取的数据是不能直接进行融合的[8],其时间同步一直是一个关键问题[9?10]。分布式POS系统包含3个IMU时钟,数据处理计算机时钟以及GPS时钟共5个时钟源,其时间同步机制相比单一POS系统更为复杂。它的高精度时间同步技术对分布式POS能否可靠工作和进行高精度测量意义重大。基于此,本文进行了数据采集与数据处理两个层面的时间同步方法设计。
(1) 在IMU数据采集层次,将PPS秒脉冲作为同步信号引入各IMU数据采集电路中,编写FPGA采集程序,实现各IMU以同步脉冲为基准进行陀螺数据、加速度计数据采集的功能,并实时修正激光陀螺IMU内部时钟漂移,具体修正算法如下:
假设IMU数据采集脉冲理论周期为T,则在GPS 秒脉冲到来前后[T2]时间内,惟一存在一个数据采集脉冲,通过IMU内部的计数器获取该脉冲相对于GPS 秒脉冲的时间差[Δt],[Δt]可以用晶振偏移数[Δf]来表示:
[Δt=Δff] (1)
式中:[f]为IMU时钟频率,即每秒钟晶振脉冲数,为使[Δt]趋于零,本文采用将每秒内的[Δf]分配到IMU数据采集周期的方式进行控制,即对IMU原始数据采集脉冲产生的周期进行调整。IMU原始时钟频率为[f],数据采集频率为[fC],每个数据采集脉冲对应的时钟分频数固定,设为[n]。当[f]不发生漂移时,有:
[f=n?fC=nT] (2)
当[f]发生漂移[Δf]时,需要对[f+Δf]进行分频,将[Δf]分配到[fC]个数据采集周期内,有:
[f+Δf=n1?a+n2?b] (3)
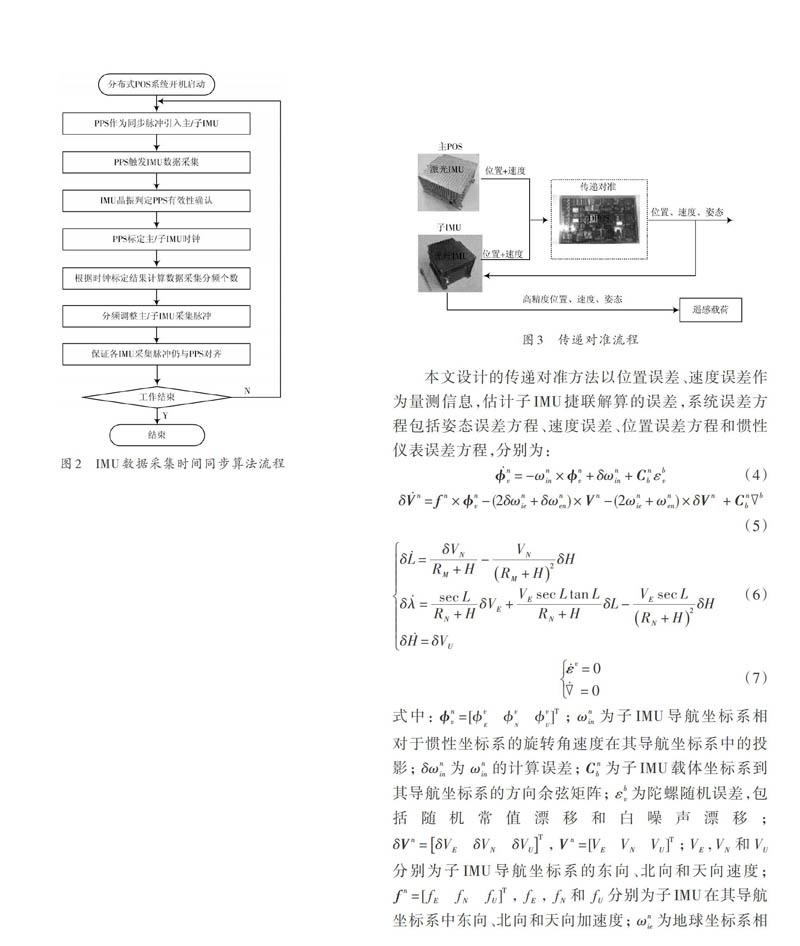
式中:[a+b=fC],[n1-n2=1];[a]表示在1 s 时间内根据IMU 系统时钟进行[n1]倍分频而生成的IMU 采样脉冲的次数;[b]表示在1 s 时间内根据IMU系统时钟进行[n2]倍分频而生成的IMU 采样脉冲的次数。由于[a]与[b]的和为[fC],所以IMU采集频率保持不变,又由于[n1-n2=1],因此各个数据采集脉冲的时间间隔基本相等。根据以上关系式,对IMU数据采集脉冲进行修正即可控制在下一个GPS秒脉冲到来时刻,[Δf]趋于零,即[Δt]为零,保证了IMU数据采集脉冲与PPS的时间同步性以及各IMU之间数据采集的同步性,时间同步算法具体流程如图2所示。
3 分布式POS数据处理电路算法
分布式POS数据处理在DPCS中进行,DPCS电路软件接收主/子IMU原始数据和GPS原始数据,实现时间同步、初始对准、捷联解算、组合滤波以及传递对准功能,最终输出主/子IMU高精度实时导航结果。
3.1 分布式POS数据处理时间同步算法
将各IMU数据统一到同一时间基准下是分布式POS数据融合的前提。数据处理时间同步算法首先将各IMU的数据时间标签进行处理,补偿各IMU的数据采集过程中由于低通滤波和平滑滤波引起的时间延迟,产生各IMU准确的时间标签;其次,采用分段线性插值的方法将各IMU数据统一到同一时刻,以便后续组合滤波和传递对准的进行。
3.2 分布式POS传递对准算法
分布式POS系统通过传递对准能够为子系统及其遥感设备提供高精度的位置、速度、姿态等信息。机载对地观测系统在实时成像过程中要求每个子IMU根据主POS输出信息做实时传递对准,且对实时性的要求较高。而完整的传递对准状态变量维数通常高达24维甚至更高,这就会导致运算速度低从而无法满足对实时性的要求。本文采用15维状态变量进行传递对准算法设计,降低运算复杂度,以满足实时性的要求。
传递对准算法流程如图3所示,首先将主POS实时导航结果进行杆臂误差补偿,DPCS中的传递对准滤波器将主POS实时导航结果和子IMU捷联解算结果进行卡尔曼滤波,估计子IMU位置、速度、姿态和惯性器件误差,并将估计出的误差进行反馈校正,得到高精度的子IMU位置、速度、姿态等信息。
本文设计的传递对准方法以位置误差、速度误差作为量测信息,估计子IMU捷联解算的误差,系统误差方程包括姿态误差方程、速度误差、位置误差方程和惯性仪表误差方程,分别为:
[?nv=-ωnin×?nv+δωnin+Cnbεbv] (4)
[δVn=fn×?nv-(2δωnie+δωnen)×Vn-(2ωnie+ωnen)×δVn +Cnb?b] (5)
[δL=δVNRM+H-VNRM+H2δHδλ=secLRN+HδVE+VEsecLtanLRN+HδL-VEsecLRN+H2δHδH=δVU] (6)
[εv=0?=0] (7)
式中:[?nv=[?vE?vN?vU]T];[ωnin]为子IMU导航坐标系相对于惯性坐标系的旋转角速度在其导航坐标系中的投影;[δωnin]为[ωnin]的计算误差;[Cnb]为子IMU载体坐标系到其导航坐标系的方向余弦矩阵;[εbv]为陀螺随机误差,包括随机常值漂移和白噪声漂移;[δVn=δVEδVNδVUT],[Vn=[VEVNVU]T];[VE],[VN]和[VU]分别为子IMU导航坐标系的东向、北向和天向速度;[fn=[fEfNfU]T],[fE],[fN]和[fU]分别为子IMU在其导航坐标系中东向、北向和天向加速度;[ωnie]为地球坐标系相对惯性坐标系的旋转角速度在子IMU导航坐标系的投影;[ωnen]为子IMU导航坐标系相对地球坐标系的旋转角速度在其导航坐标系的投影;[δωnie]和[δωnen]分别为[ωnie]和[ωnen]的计算误差;[δL],[δλ]和[δH]分别为纬度误差、经度误差和高度误差, 其中,[ωie]为地球自转角速度;[RM]和[RN]分别为地球沿子午圈和卯酉圈的主曲率半径;[L]和[H]分别为子IMU的纬度和高度;[?]为加计随机误差,包括随机常值偏置和白噪声偏置;[εv=[εvx εvy εvz]T],[?=[?x ?y ?z]T];子IMU的系统误差模型采用15维,状态变量包括3个姿态误差、3个速度误差、3个位置误差、3个陀螺漂移误差和3个加速度计漂移误差,状态变量[X]可表示为:
[X=[?E ?N ?U δVE δVN δVU δL δλ δH εE εN εU ?E ?N ?U]] (8)
系统量测方程可表示为:
[Z=HX+V] (9)
其中,[V]为量测噪声矩阵,系统量测矩阵[H]为:
[H=03×3 I3×3 03×903×6 H1 03×6] (10)
[H1=RM+H000RN+H0001] (11)
根据状态方程与量测方程建立卡尔曼滤波方程,校正子IMU捷联解算的误差,从而得出高精度的子IMU位置、速度和姿态。
3.3 分布式POS数据融合软件设计
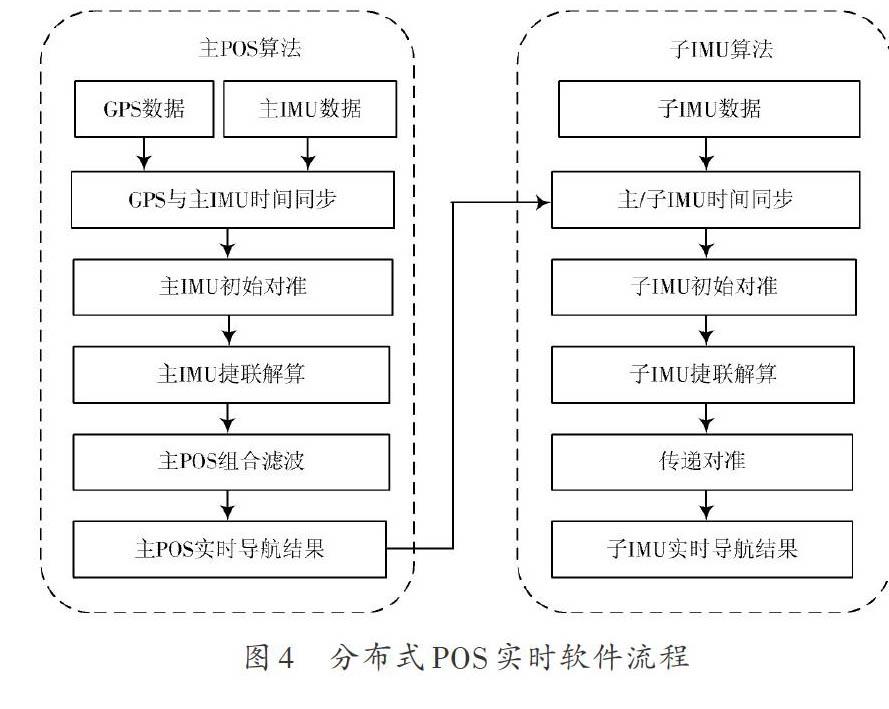
分布式POS软件是数据同步融合算法的载体,是实现分布式POS功能实现的关键,主要包括FPGA软件和DSP软件,分别完成不同功能,软件流程如图4所示。
FPGA软件主要完成数据的管理和调度功能,因此,可将其分为时钟模块、IMU通信模块、GPS通信模块、时间同步模块、DSP的并口通信模块、外部通信模块以及数据存储模块。
(1) 时钟模块。利用有源晶振输入的时钟作为主时钟,通过不同分频比得到各子时钟。
(2) IMU数据接收模块。接收IPS脉冲信号,并以200 Hz,307 200 b/s接收各IMU发送来的原始脉冲数据,并打包发送到缓冲区中。
(3) GPS数据接收模块。接收PPS脉冲信号并以1 Hz,115 200 b/s接收GPS原始数据,将GPS信息打包发送到缓冲区中。
(4) 时间同步模块。以PPS信号作为时间同步信号发送至各IMU中,并完成其他时间同步功能。
(5) DSP通信模块。接收完IMU、GPS数据后,通过外部中断方式通知主DSP取数,主DSP启动并口总线通信读取FPGA发送的数据并进行计算。在DSP完成计算后,将DSP发送来的数据进行读取。
(6) 外部接口及上位机通信模块。接收完各主DSP的最终导航结果后,以200 Hz通过RS 422向外部发送至载荷,同时将GPS原始数据,IMU原始数据通过RS 232向外部发送,以进行监控。
(7) 数据存储模块。将每个IMU的原始数据进行分包存储,同时将GPS的原始数据进行存储,以便于事后处理。
DSP软件是完成导航算法的核心,包括时间同步、初始对准、捷联解算、组合滤波、传递对准等模块。
(1) 时间同步模块。首先将各IMU数据标签进行滤波实验补偿和平滑时延补偿,然后通过线性插值的方法,将各IMU数据与GPS数据统一到基准时刻,以保证后续组合导航及传递对准时间精度。
(2) 初始对准模块。该模块利用IMU数据获取初始姿态,利用GPS数据获取位置和速度,为后续的捷联解算提供高精度的初始位置、速度和姿态等信息。
(3) 捷联解算模块。以上一时刻的位置、速度、姿态等信息作为当前捷联解算的初始值,结合当前时刻的IMU数据进行捷联解算,获得当前时刻的位置、速度、姿态信息。
(4) 组合滤波模块。读取GPS数据和IMU捷联解算结果进行卡尔曼滤波,对捷联解算模块输出的位置、速度和姿态以及惯性器件的误差进行估计,并将估计出的误差进行补偿,提高主POS测量精度。
(5) 传递对准模块。首先进行杆臂误差补偿,将主POS实时导航结果补偿到子节点,传递对准滤波器将主POS的实时导航信息与子IMU捷联解算结果融合,获得子IMU高精度位置、速度、姿态等信息。
4 实验及结果分析
为验证本文设计的分布式POS多源数据同步融合算法,进行了车载半物理仿真实验,如图5所示,采用一个高精度的RLG IMU作为主IMU,一个小型FOG IMU作为子IMU,将两个IMU安装在减震平台上,减震平台固定于车内,GPS天线安装于车顶。首先将实验车静止300 s,完成两个IMU的初始对准,然后沿预定路线行驶1 h,将原始数据进行存储,以差分GPS作为基准,比较主POS与子IMU实时导航精度。结果如表1所示,主POS实时导航位置均方根误差(RMSE)为0.967 m和1.182 m,子IMU实时导航位置均方根误差(RMSE)为1.315 m和1.594 m。
5 结 语
本文设计了一种分布式POS数据采集以及数据融合的时间同步算法,设计了分布式POS传递对准算法以及分布式POS数据处理电路软件,对所设计的方法进行了车载半物理仿真实验。实验结果表明,采用本文设计的分布式POS多源数据同步融合算法,主POS实时导航位置精度达到0.967 m和1.182 m,子IMU实时导航位置误差达到1.315 m和1.594 m,实现了分布式POS的基本功能,验证了多源数据同步融合算法的有效性。
参考文献
[1] 安培浚,高峰,曲建升.对地观测系统未来发展趋势及其技术需求[J].遥感技术与应用,2007,22(6):28?29.
[2] MOHAMED M R, MOSTAFA K P, SCHWAR Z. Digital image geo?referencing from a multiple camera system by GPS/INS [J]. ISPRS journal of photogrammetry and remote sensing, 2001, 56(1): 1–12.
[3] LI J L, FANG J C, DU M. Error analysis and gyro?bias calibration of analytic coarse alignment for airborne POS [J]. IEEE transactions on instrumentation and measurement, 2012, 61(11): 3058–3064.
[4] LI D R, TONG Q X, LI R, et al. Current issues in high?resolution earth observation technology [J]. Science China earth sciences, 2012, 55(7): 1043?1051.
[5] 房建成,张舟,宫晓琳.机载分布式POS传递对准建模与仿真[J].中国惯性技术学报,2012,20(4):379?385.
[6] 李玉寰.基于DSP和FPGA的机载导航计算机设计[D].南京:南京理工大学,2010.
[7] 赖冬寅,吴云峰,叶玉堂,等.基于FPGA 实现由多路复合信号传输到Camera Link传输的研究[J].电子器件,2009,32(3): 666?668.
[8] EL?SHEIMY N. Mobile multisensor systems final report (1995?1999) [R]. [S.l.]: International Association of Geodesy IAG Special Commission, 1999.
[9] LI Y, WANG J, DING W, et al. A time synchronization device for tightly coupled GPS/INS integration [J/OL]. [2014?08?19]. www.researchgate.net/p
[10] 朱智勤,吴玉宏,羊远新.GPS /INS 组合系统中时间同步的模块化实现[J].武汉大学学报(信息科学版),2010,35(7):830?832.
