基于磁流变技术的发动机振动模糊控制研究
2016-05-14陈作越杨玫
陈作越 杨玫


摘 要:为实现宽频范围内对发动机振动进行积极隔振,提出了一种混合模式的磁流变悬置结构。以磁流变悬置动态性能试验结果为数据样本,利用BP神经网络分别对磁流变悬置正、逆模型进行辨识;同时,建立了三点磁流变悬置系统6自由度模型,设计了基于磁流变悬置BP神经网络正、逆模型的模糊控制器,对磁流变悬置系统进行隔振控制,仿真结果表明:BP神经网络具有较高的准确度,在磁流变悬置模型辨识方面具备优越性能;模糊控制器均能较好地在宽频范围内的衰减发动机振动,发动机稳定转速下对应的位移和加速度振动峰值明显减小。
关键词:磁流变悬置 混合模式 BP神经网络 模糊控制器
中图分类号:U463 文献标识码:A 文章编号:1674-098X(2016)03(c)-0053-06
Abstract:In order to resolve noise and vibration problems generated by vehicle engine, a new mixed mode MR mount is proposed. The direct and inverse models of the MR mount were identified by dynamic performance test results with BP neural network. Meantime, a six degrees of freedom dynamic model of an in-line four-cylinder engine which has three points mounting system is derived by considering the dynamic direct and inverse models of MR mount and its state space form is established. The fuzzy control strategy was adopted for the semi-active mounting model. The results showed that the fuzzy control strategy has better performance in a wide frequency range, which,the displacement and acceleration amplitude reduced significantly. The BPNN network inverse model and the variable universe fuzzy control a strategy were correct and effective.
Key Words:MR mount; Mixed mode; BP Neural Network; Fuzzy-logic controller
影响汽车振动和噪声的主要因素来源于发动机的振动,传统的被动悬置被主动和半主动控制悬置取代已经成为了现代汽车发展的趋势[1-3]。
作为智能软材料,磁流变液(MRF)由磁性颗粒分布于绝缘载液中构成,其流变特性随外在磁场的变化而急剧改变[4-5]。利用该特性设计磁流变悬置从而使悬置动刚度能够连续变化,来达到低频大刚度、大阻尼及高频小刚度、小阻尼的隔振目的。磁流变技术的应用,为完全隔离发动机振动,改良汽车舒适性提出了崭新的技术途径。
Choi等研究了磁流变悬置在结构振动控制上的应用,提出了LQR方法[6-7]。Nguyen提出了一种磁流变悬置结构,仿真研究了设计参数对动刚度的影响[8]。翁建生等建立了发动机磁流变悬置系统动力学模型,提出了磁流变悬置系统开环控制策略,仿真研究了控制策略的有效性[9]。胡勇等设计了发动机磁流变悬置,试验测试了磁流变悬置的特性[10]。
该文针对某款四缸发动机,设计了基于混合模式的磁流变液压悬置结构,以磁流变悬置的动态性能试验数据为样本,采用BP神经网络方法建立了磁流变悬置的正、逆模型;在此基础上,建立了发动机磁流变悬置系统6自由度模型,考虑发动机悬置系统的状态变量和控制变量,采用模糊控制方法对三点磁流变悬置的发动机隔振系统进行半主动控制,验证磁流变正逆模型和模糊控制策略的有效性。
1 悬置结构设计与性能试验
该文针对某款四缸发动机提出了基于混合模式的磁流变液压悬置,如图1所示。橡胶主簧上部通过内嵌金属块、连接螺栓和发动机相连,下部由活塞杆和活塞相连。活塞及活塞杆、内嵌金属块与连接螺栓在发动机的载荷作用下共同上下运动;橡胶主簧与橡胶底膜形成液室,室内充满磁流变液体。活塞上缠绕线圈,改变励磁电流,阻尼通道中的磁流变液粘度发生改变,因而使磁流变悬置输出的阻尼力无级、连续可调。
采用电液伺服减振器性能试验机对自行设计的磁流变悬置进行动态性能测试。试验共采集了行程为0.2 mm和1 mm,频率范围为1~50 Hz,频率间隔为1 Hz,电流为0 A、0.5 A、1.0 A和1.5 A时的试验数据,为磁流变悬置模型的设计和控制算法的设计奠定基础。
2 BP神经网络建模
2.1 BP神经网络
作为一种多层前馈神经网络,BP神经网络具有信号向前传递,误差反向传播的特点。在前向传递中,输入信号从输入层经隐含层逐层处理,直到输出层。若输出层得不到期望的输出,则转入反向传播,根据预测误差改变网络权值及阀值,达到BP神经网络预测输出不断地逼近期望输出的目的。其拓扑结构如图2所示。
是BP神经网络的输入,输入个数为;是BP神经网络的输出,输出个数为;、分别为神经网络输出层、隐含层阀值;为输入层与隐含层间连接权值;为隐含层与输出层间连接权值。神经网络具有高度的非线性映射能力可以看成一个非线性连续函数[11]。
2.2 BP神经网络正模型
以磁流变悬置性能试验结果为训练样本,基于BP神经网络模型对磁流变悬置正模型进行辨识,其原理如图3所示。以前一时刻的位移、激振频率、电流、恢复力和当前时刻的位移、激振频率、电流为神经网络正模型的输入变量,当前时刻的恢复力为神经网络正模型的输出变量,其中N为归一化处理;D为延迟单位采样时间。
结合磁流变悬置性能试验数据对BP神经网络进行训练。其中随机选取3 500组数据作为训练样本,选取3 500组数据作为辨识精度测试样本,得到BP神经网络的预测误差,如图4所示。磁流变悬置阻尼力预测结果和试验数据具有较高的吻合程度,误差范围控制在[30,-40]N。
2.3 BP神经网络逆模型
同理,利用BP神经网络模型对磁流变悬置逆模型进行辨识,其原理如图5所示。选取前一时刻的位移、激振频率、电流、恢复力和当前时刻的位移、激振频率、恢复力神经网络逆模型的输入变量,当前时刻的电流为神经网络逆模型输出变量,其中N为归一化处理;D为延迟单位采样时间。
结合磁流变悬置性能试验数据对BP神经网络进行训练。得到BP神经网络逆模型的预测误差,由图6所示。磁流变悬置电流预测结果和试验数据具有较高的吻合程度,电流预测误差范围控制在[4,-5]e-4A。
3 磁流变半主动模糊控制
3.1 磁流变悬置系统动力学模型
选用四缸四冲程直列式柴油发动机为研究对象,悬置系统由3个磁流变悬置组成,建立模型如图7所示。
由图7所示,G0-XYZ、G0-xyz分别是定坐标系和动坐标系,G0是动力总成在静平衡时的质心。X轴与曲轴平行且指向汽车前方,Y轴与车架上平面平行,Z轴由右手法则确定,当动坐标系处于静平衡时,动坐标系与定坐标系重合。设系统广义坐标为动力总成沿X、Y、Z方向的平动、、及绕三轴的转动θx、θy、θz,即广义坐标为θx θy θz。
根据拉格朗日方程推导发动机隔振6自由度动力学方程如式(1)。
3.2 模糊控制器设计
模糊控制器设计时,取各悬置点的垂向速度和垂向速度变化率作为模糊控制器的输入量,输出量为磁流变悬置可控阻尼力。针对3个悬置点设计3个独立的模糊控制器。输入输出的语言变量隶属度函数均采用三角形隶属度函数。
按照经验及理论推导,“以最短时间使发动机某点悬置振动速度衰减至零”的标准建立模糊控制规则。若发动机某点悬置振动速度负向最大(取垂直向上为正),同时加速度亦是负向最大时,要求最短时间将振动速度衰减至零,则阻尼值应达到最大值,产生最大正向阻尼力;同理,若振动速度正向最大,加速度亦是正向最大时,阻尼也应达到最大值,即阻尼力负向最大。制定出模糊控制规则见表3,图8是根据该规则生成的输入、输出模糊控制三维曲面。
图9为发动机磁流变悬置模糊控制系统框图,各悬置均采用磁流变悬置,发动机转速的变化范围为650~3000 r/min。对模糊控制器设计时,取各悬置点的垂向速度和加速度作为控制器的输入量,输出量为磁流变悬置理想控制力,通过BPNN网络磁流变悬置逆模型得到控制电流,最后通过BPNN网络磁流变悬置正模型可以得到实际的控制阻尼力,作用于动力总成悬置系统半主动控制。
3.3 仿真试验
利用Matlab仿真软件,仿真试验对象选用某型号四缸四冲程柴油发动机,建立的仿真模型基于被动液压悬置及磁流变液压悬置。试验时,给发动机输入宽频激励,采用最大供油方式,自发动机启动开始,分别对稳定转速为1 000r/min,1 500 r/min,磁流变悬置1点的速度、加速度振动信号进行记录。
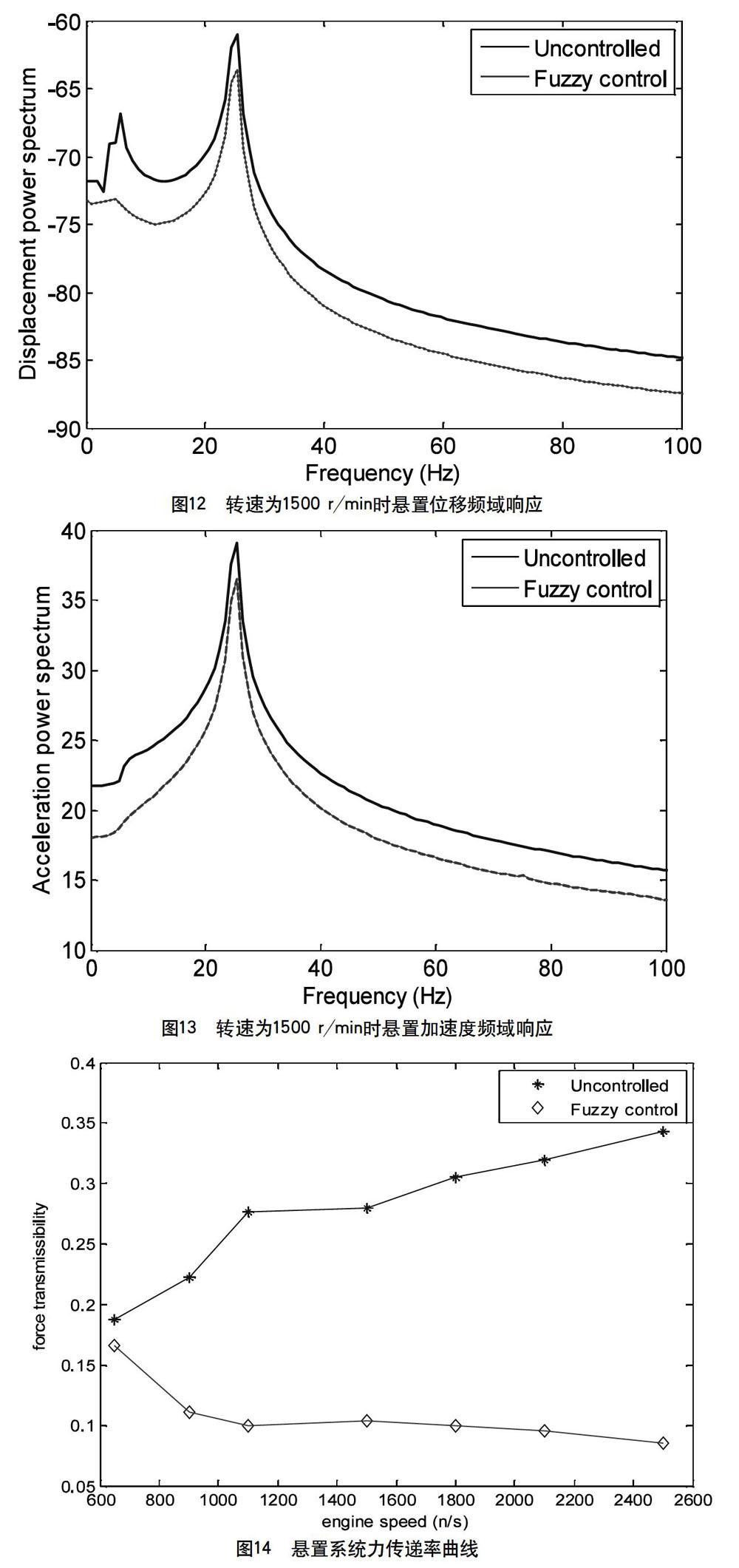
从各种转速下悬置点的速度功率谱图可知:对应发动机转速1 000 r/min,1 500 r/min,其转速频率分别为16.7 Hz,25 Hz。在这些峰值位置,相对被动液压悬置产生振动速度幅值,模糊控制磁流变悬置振动速度幅值振幅下降效果显著,并且模糊控制在宽频范围内均具有较好的隔振效果,说明模糊控制规则设计合理有效。
从表4可知,转速为1 000 r/min、1 500 r/min时,控制后悬置点位移均方根值分别下降43.5%、47.7%,控制后悬置点加速度均方根值分别下降32.5%、27.7%,极大地衰减了发动机工作时的振动。
从图14的悬置系统力传递率曲线可知:相对于被动液压悬置隔振系统,可控磁流变悬置隔振系统在不同稳定转速下工作时,能有效抑制传递到基座的力,磁流变悬置模糊控制隔振系统的力传递率下降明显。
仿真结果表明,在宽频范围内,与不施加控制算法的被动控制相比,模糊控制都具有较好的振动控制效果,显著的降低了发动机的振动,从而验证了模糊控制算法的有效性。
4 结语
设计了基于混合模式的磁流变悬置,以悬置性能试验数据为训练样本,采用BP神经网络方法对磁流变悬置的正逆模型进行辨识,该方法具有较高的辨识精度,满足磁流变悬置系统控制设计精度要求,为磁流变悬置系统控制策略的研究奠定了基础。
建立了基于三点磁流变悬置的6自由度悬置系统动力学模型,在BP神经网络正逆模型的基础上,设计了基于磁流变悬置的模糊控制策略。悬置系统稳态控制仿真结果表明:与未施加控制算法的被动控制相比,模糊控制都具有较好的振动控制效果,显著降低了发动机的振动,力传递率限制在20%以内,实现了发动机宽频有效隔振。验证了基于BP神经网络正逆模型的模糊控制策略是有效可行的。
参考文献
[1] 贾永枢,周孔亢.车用磁流变液流变特性分析及试验[J].机械工程学报,2009,45(6):246-250.
[2] 王永达,许沧粟.发动机振动模糊半主动控制的研究[J].汽车工程,2006,28(7):663-666.
[3] Hong SR,Choi SB,Han MS.Vibration control of a frame structure using electrorheological uid mounts[J]. International Journal of Mechanical Sciences,2002,44(10):2027-2045.
[4] 郭鹏飞,关新春,欧进萍.磁流变液阻尼器响应时间的试验研究及其动态磁场有限元分析[J].振动与冲击,2009,28(6):1-5.
[5] Jazar,G.N.,Golnaraghi,F.Engine Mounts for Automotive Applications:A Survey[J].The Shock and Vibration Digest,2002,34(5):363-379.
[6] Sung-Ryong Hong,Seung-Bok Choi.Vibration Control of a Structural System Using Magneto-Rheological Fluid Mount[J].Journal International Material System And Structures, 2005,16(11-12):931-936.
[7] Seung-Bok Choi,Sung-ryong Hong, Kum-Gil Sung,et al,Optimal control of structural vibrations using a mixed-mode magnetorheological fluid moun[J].International Journal of Mechanical Sciences,2008(50):559-568
[8] Elahinia M,Nguyan T,Ciocanel C.Parameter optimization in designing an MR mount[C]// Proceeding of 15th International Congress on Sound and Vibration,Daejeon,Korea.2008:237.
[9] 魏付俊.汽车动力总成磁流变悬置的设计和半主动控制研究[D].南京:南京航空航天大学,2007.
[10] 胡勇.汽车发动机磁流变悬置研究[D].重庆:重庆大学,2008.
[11] 孙志强,葛哲学.神经网络理论与MATLAB7实现[M].北京:科学出版社,2005.
