基于新奇检测技术在桥梁结构异常识别中的研究
2016-05-14陈荣金
陈荣金


摘 要: 为了实现桥梁结构的异常状态和位置识别,并避免桥梁模型的建立带来的影响,提出采用基于BP神经网络的改进型新奇检测技术进行状态识别的方法。为了验证该方法的可行性,首先将该方法应用于T梁模型试验中开裂状态与异常位置的识别,工程试验验证效果良好。随后将该方法应用于大跨度拱桥损伤位置的识别,也得到了现场实测数据的验证。
关键词: 桥梁健康评估; 结构异常诊断; 新奇测验技术; 开裂位置识别; 异常位置识别
中图分类号: TN911?34; TM417 文献标识码: A 文章编号: 1004?373X(2016)09?0128?05
Abstract: To identify the abnormal status and location of the bridge structure, and avoid the influence of the bridge mode?ling, the status identification method using the improved novel detection technology based on BP neural network is proposed. To verify the feasibility of the method, this method is applied to the T?beam model test to identify the cracking status and abnormal location. The effectiveness of the method was proved by engineering test. The method was applied to the damage location identification of the large?span arch bridge, and verified with field measuring data.
Keywords: bridge health assessment; structural abnormality diagnosis; novel test technology; cracking location identification; abnormal location identification
0 引 言
近年来全国多地发生桥梁坍塌事故,除去地质灾害等非人为可控的因素外,桥梁在服役期间的健康度下降也是导致安全问题的一个重要因素。国内外在桥梁结构的异常状态识别做了大量的研究,提出了许多切实有效的方法,但是考虑到丫髻沙大桥的特殊性,经过了大修,桥梁结构特性与建桥初期发生了比较大的变化,桥梁的数值模型的修正难度比较大,采用数值模型方法对桥梁结构进行评估可行性不大、有效性不高[1]。因此本文探讨了基于BP神经网络的新奇检测技术进行桥梁结构异常状态与位置识别的方法。
1 新奇检测技术
1.1 改进型新奇检测指标与阈值设定
为了判定两种模式是否发生了变化,需要一个指标判别BP神经网络的输入向量跟输出向量的偏离大小,该指标可由一个距离函数表示。本文采用BP神经网络的输入向量(理论输出目标)和输出向量(实际输出目标)差的二次范数作为新奇指标[2]。将结构正常状态下的测量数据作为训练BP神经网络的输入向量,同时也作为输出向量训练BP神经网络。神经网络训练完成后,可将其余的多组正常数据作为输入向量再一次输入到训练好的神经网络,产生相对的输出向量,并按照式(1)计算[3],得到结构状态正常时的新奇指标[4][λ。]
式中:[λt]为异常检测阶段得到的新奇指标,将阈值[δλ]与[λt]进行比较,其差异可判定异常是否发生。
结构状态发生变化是根据结构正常阶段和检测阶段的新奇指标的比较来判定的,如果结构的状态发生了变化,则在检测状态的新奇指标就会与结构正常时的新奇指标有很大差别。当该差别大于判定的阈值时,便可判定结构状态发生了变化,同理,可以根据新奇指标的大小来判定状态发生变化的程度。
2 新奇检测技术在T梁开裂试验中验证
2.1 T梁模型
本次试验模型选取梁间距最大、受力最不利的桥面板进行分析。本次试验荷载按照应力等效原则确定,试验前对结构的横向受力进行分析,按照设计荷载下最不利应力幅进行等效模型试验。模型选取与翼缘1[∶]1尺寸模型,钢筋构造与设计相同。模型板采用简支结构,板跨径按翼缘最大宽度取2.535 m(26 m整体式路基T梁),板宽取1 m。结构模型示意图如图1所示。
根据T梁开裂试验中传感器的分布,与有限元模型分析,不同种类传感器的作用如下:
(1) 钢筋应变传感器:该传感器预埋到T梁结构中,能反应结构内部在荷载试验中的受力情况,也可作为评定整个结构是否发生变化的依据,编号从1?1至1?8共8个传感器。
(2) 腹板应变传感器:该传感器贴附在模型腹板两侧,湿接缝处与跨中处各5个,一共6组,分别记为:A1~A5,B1~B5,C1~C5,[A′1~A′5,][B′1~B′5,][C′1~C′5,]主要目的是在后期数据分析时来计算中心轴高度,在本方法中,可以把每组作为一个整体,判定在此区域内有无状态变化(即裂缝是否产生)。
(3) 底板应变传感器:该传感器贴附于桥梁模型底板偏外两侧,共14个,分为两组,分别记为D1~D7,[D′1~D′7,]其主要目的是捕捉模型底板是否产生裂缝,由于在加载过程中底板理论上应该最先出现裂缝,所以每组可作为一个整体判定有无状态变化,并且两组的测试数据互为补充,增加了状态判定的准确性。
2.3 BP神经网络的训练样本的生成
由于加载过程以及测试方法的问题,样本数量有限。以原始30组实验数据作为神经网络的训练样本按照训练流程训练神经网络,得到新奇指标的均值[λ]=49.9,新奇指标偏大。可以根据实测数据修正该结构有限元模型来获得更多样本数据,使得有限元模型的计算结果与实际传感器测量数据接近。根据验证,结构理论开裂荷载为40 kN,可以形成每个传感器在荷载0~40 kN时结构未发生开裂的80组数据。由此作为正常状态时的神经网络训练样本。根据此方法扩大样本量,可以增加神经网络训练的准确性。
2.4 开裂位置识别流程与实现
T梁状态评估分为状态识别和开裂位置识别两个阶段。首先将分级加载的测量数据进行分析处理,输入到训练好的整体状态识别网络,得到检测阶段状态识别新奇指标。当指标正常时,本次识别结束,异常时,进行异常位置识别。在异常位置识别阶段,利用上面训练好的12个网络逐级识别,确定异常区域。最后,根据区域内传感器变化率做出综合诊断。
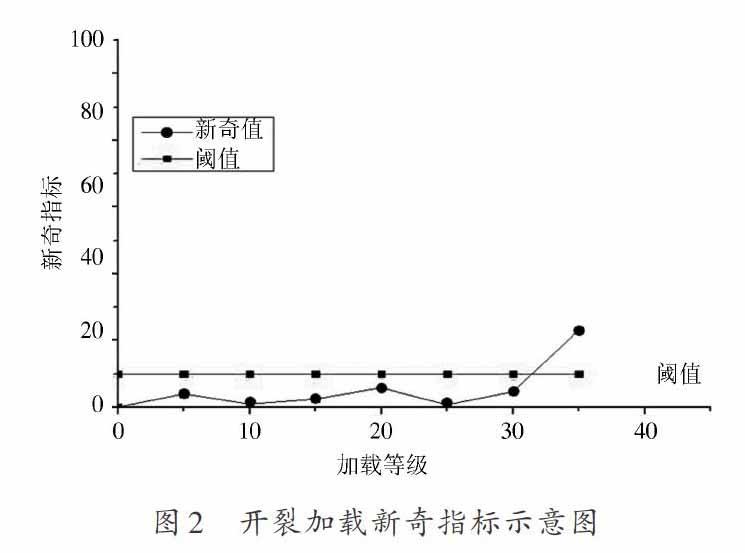
在开裂加载0~40 kN时,根据每级加载状态,分别将5 kN,10 kN,15 kN,20 kN,25 kN,30 kN,35 kN,37 kN,39 kN,40 kN的数据依次代入网络进行判定。得到的新奇指标与阈值如图2所示。
由图2可知,经过BP神经网络判定得知,当加载到35 kN时结构发生变化;经过后期数据处理分析可知,加载到35 kN时结构已发生了变化,神经网络判定结果与实际相符合。
当结构发生变化时,采用三级分区方式来定位异常区域。第一级分区如图3所示。
由图3可知,从5 kN开始,网络ABCD,网络A′B′C′D′奇异值都大于阈值。即ABCD侧与A′B′C′D′侧两个区域都发生了异常。
第二分区识别时,奇异值均大于阈值,证明腹板跟底板区域都发生了异常。
然后进入第三级分区,对腹板与底板混合区域进行识别。第三级分区时部分区域网络奇异指标如图4所示。
根据最终神经网络区识别可以得出,网络BD345与网络B′D′345出现异常,再根据该区域内传感器的变化率定位位置。表1为网络BD345区域应变传感器变化率[φ]。
由表1可知,载荷35 kN时,应变传感器变化率相对30 kN变化不大,说明仅通过单一传感器变化的方式无法判断整体结构是否发生变化。该方法可以降低结构异常诊断的漏警。
随着荷载的增加以及应变的变化率,可以判定在传感器B5,D4,D5处发生裂缝的可能性较大。
最终判定结果证明B5,D4,D5,[B′4,][B′5,][D′3,][D′4,][D′5]处测量值较异常,该判定结果与人工巡检结果相同。证明该裂缝识别与定位方法可以应用到T梁静载试验中。
3 在大跨度拱桥异常诊断中的研究
根据上述实验结果表明,该方法可以实现简易结构中异常识别与定位,可以将该方法推广到大型结构的异常识别与定位中。结合丫髻沙大桥的结构特点及维修加固内容,丫髻沙大桥健康监测内容主要包括吊杆索力、拱肋应力与温度、钢横梁应力、拱肋及桥面线形及大桥重点部位工作状态的定期检查等五个部分。
3.1 拱桥状态异常识别方法
新奇检测技术可以比较容易实现整体状态评估,但是不能直接识别出损伤的位置。通过监测数据如吊杆索力,刚横梁应变、拱肋应变与温度,可以对不同区域是否发生异常进行识别,确定异常区域。
将状态异常识别分成两个阶段:第一个阶段是整体状态识别;第二个阶段是状态异常位置识别。这两个阶段都使用新奇监测技术实现。训练神经网络的数据都是监测系统采集到的实际数据。损伤指标由吊杆索力,刚横梁应变、拱肋应变与温度共同组成。
(1) 实测数据预处理
外部温度对拱肋应变影响明显,随着温度的变化,拱肋应变分别有正相关和负相关的变化。因此,在训练神经网络时,必须考虑温度的影响。结合实际情况,用于整体状态异常评估的每个输入向量由48个拱肋应变、相对应的24个拱肋温度、6个吊杆索力、2个刚横梁应变共80个测点组成80维的输入向量。
对于异常评估系统,保证数据的时间统一性是一个很重要的问题。由于对于大跨度拱桥来说,吊杆是直接受力构件,也是荷载最敏感构件。所以每分钟对6个吊杆进行极大值提取,并相应的提取每个吊杆极大值产生的时间,根据极大值产生的时间调取该时间对应的拱肋应变、温度等其他测量数据,形成6组80维的输入向量。
为了能更好的利用数据,防止数据丢失,需要将该输入向量进行备份。
(2) 神经网络训练
对于整体状态异常评估和异常位置识别,都将神经网络设计为含有“瓶颈”的四层BP神经网络。将网络结构设计为:80?64?64?80,4层前馈BP网络。第二层与第三层的传递函数取为tan?sig,1层跟2层以及3层跟4层之间采用线性传递函数purelin。通过训练可以得到训练好的神经网络(整体状态网络),基于改进型的新奇指标,根据[δλ=λ+4σλ],获取[σλ=42.6]。将[σλ]与[λt]两者进行比较,其差异可判定异常是否发生。
用于异常位置识别的训练数据都是按照要求从用于整体状态异常评估的训练数据中分离出来,分离时只改变向量的维数,不改变向量序列。
3.2 异常位置识别
当整体状态发生异常时,就要进行异常位置识别,异常位置识别采用逐级分区识别方法,逐步实现异常位置识别功能。结合丫髻沙大桥的实际监测状况,异常位置识别采用三级分区识别。第一级分区:确定异常位置处于上游侧还是下游侧;第二级分区:区分异常位置出现在拱肋构件上或者吊杆、刚横梁构件上;第三级分区:确定具体异常位置。通过三级分区,一共可以得到22个训练完成的神经网络,以及相对的新奇指标。
3.3 异常位置识别流程
将状态异常识别分成两个阶段:第一个阶段是整体状态识别;第二个阶段是状态异常位置识别。异常位置识别流程如图5所示。
3.4 工程验证
丫髻沙大桥正处于运营中时常会有超载车辆通过,当超载车辆通过桥梁时,理论上桥梁受力会发生异常。以2014年12月2日的数据为例,用实测数据对该拱桥异常状态识别方法进行验证。在整体异常状态识别阶段,新奇指标大于设定阈值时,就会自动启动状态异常位置识别程序。整体新奇指标变化如图6所示。
当新奇指标超过设定阈值时,开始逐步分区识别:
第一级分区:上游网络的新奇指标大于设定阈值,下游网络的新奇指标小于设定阈值,说明状态异常出现在上游,下游正常。
第二级分区:目的是检测异常发生在上游拱肋处或上游吊杆钢横梁处,拱肋和吊杆钢横梁处的新奇指标都超过了既定阈值。说明异常在拱肋和吊杆钢横梁处都有发生。
第三级分区:根据第二级分区识别的结果,对上游拱肋和上游吊杆横梁截面进行进一步分区。上游拱肋[D]截面与上游吊杆钢横梁4#,17#截面新奇指标均大于设定阈值。
根据对健康监测系统实际采集的吊杆索力数据(kN)的分析,如图7所示,吊杆4#,17#,30#依次出现比较大的波动,波动幅度超过原荷载的10%,通过该数据分析可知,有大型超载车从丫髻沙大桥的上游侧依次通过4#,17#,30#吊杆,通过调取当时监控录像,确实发现有大型超载车出现。
通过后期对实测数据和监控录像分析的结果与该拱桥状态识别方法识别的结构完全吻合,之后吊杆索力恢复正常,同时状态识别新奇指标也恢复正常,说明这次异常没有对桥梁造成直接的损害,桥梁整体安全,与人工巡检结论类似。同时可以发现,大型超载车对桥梁结构的受力产生了比较大的影响,为了保证该桥的正常使用寿命,建议监管部门严格控制超载。
4 结 论
本文为完成健康评估系统中桥梁结构异常状态识别的功能以及为基于多种评价信息融合的健康安全性评估方法提供桥梁整体运营状态的评价依据,探讨了基于BP神经网络的新奇检测技术进行桥梁结构异常状态与位置识别的方法。为了验证该方法在结构异常状态与位置识别中的可行性,首先将该方法应用于T梁模型试验中开裂状态与异常位置识别,该方法在工程试验中得到了可行性验证。然后将该方法应用于大跨度拱桥损伤位置识别,并且用现场实测数据进行了验证。结果表明,该方法不但可以对捕捉超载车辆对结构整体运营状态产生的影响,而且可以对异常位置进行较为准确的识别。
参考文献
[1] 孙宗光,倪一清,高赞明.基于新奇检测技术的桥梁结构损伤预警方法[J].公路交通科技,2007,24(10):72?75.
[2] 温青.斜拉桥索力健康监测[D].湘潭:湖南科技大学,2013:47?49.
[3] 张晓昕,朱贺,刘遥路,等.基于监测数据的拱桥吊杆疲劳寿命评估方法及应用[J].防灾减灾工程学报,2010,30(z1):314?317.
[4] Matlab中文论坛.Matlab神经网络30个案例分析[M].北京:北京航空航天大学出版社,2010:4?5.
[5] 赵玲,李爱群.基于神经网络技术的斜拉桥损伤分步识别方法[J].公路交通科技,2009,26(9):70?75.
[6] 余波,邱洪兴,王浩,等.杨浦大桥钢箱梁疲劳应力监测及寿命分析[J].公路交通科技,2009,26(8):105?109.
[7] 向桂兵.悬索桥吊索疲劳疲劳裂纹扩展行为研究[D].长沙:长沙理工大学,2009:49?51.
[8] 王修勇,温青,杨琪,等.基于新奇检测技术的斜拉索状态评估[J].公路交通科技,2011,28(9):53?59.
