大时滞参数时变复杂过程的仿人智能控制
2016-05-11HumanSimulatedIntelligentControlofComplexProcesswithLargeTimeLagandTimevaryingParameters
Human Simulated Intelligent Control of Complex Process with Large Time Lag and Time-varying Parameters
雷正桥(重庆工业职业技术学院教务处,重庆 401120)
大时滞参数时变复杂过程的仿人智能控制
作者雷正桥(1973-),男,2005年毕业于西南大学计算机应用专业,获硕士学位,副教授;主要从事计算机自动化控制方面的教学与科研工作。
0 引言
以轧钢加热炉燃气燃烧过程控制为背景,探讨大时滞参数时变复杂过程的控制问题。该过程是典型的复杂过程,由于轧钢加热炉系统本身就是一个大惯性复杂对象,工作机理复杂,不仅变量众多、相互耦合,更加突出的是难以采用数学方法描述其本质特征,如由于不确定性导致的时变参数、纯时间滞后变化等。为了充分利用焦炉、高炉等煤气,一般钢铁企业将上述煤气混合作为加热炉燃气。鉴于煤气热值与煤气管网压力的剧烈波动,同时由于炉内钢坯温度场分布的不均匀性以及某些炉内热工参数难以测量,导致对其燃烧过程进行优化控制更加困难[1-2],因此,对大时滞参数时变复杂过程控制进行探讨具有现实技术应用意义。本文提出了一种纺人智能控制策略,并经仿真实验验证其可行性。
1 过程控制难题与控制论特性
1.1过程控制难题
由于存在诸多不确定性因素,燃烧过程难以数学建模,采用PID或改进的PID控制器控制炉温过程,调节速度慢,极易产生超调,控制精度不高,难以进行控制参数优化整定,在响应速度和准确性之间难以做出最佳决策,使炉温过程控制具有良好的加热质量和加热曲线与灵活的操作性。时滞特性不仅影响控制品质和控制过程的稳定性,更增加了对系统分析和设计的复杂性。尽管Smith预估器可对时滞特性进行补偿控制,但它是一个基于数学模型的预估控制,对参数变化较为敏感,由于过程的时变性和不确定性,严重影响其预估控制效果,甚至导致不稳定现象的产生。模糊控制鲁棒性比较好,抗干扰能力比较强,无需建立精确数学模型,但是过程的不确定性必然导致控制规则的不完备,因此不能直接用于大时滞过程控制,即使是专家与仿人智能模糊控制也同样不适合于时滞过程的控制。神经网络控制需要足够的实验样本对网络连接权值进行训练,因复杂性与不确定性,其实验样本很难从实验中获取,限于方法的局限性,很难取得良好的控制效果。同样,复杂性与不确定性导致过程特征信息采集与表达以及完备知识库建立的实现难度增大,也不宜采用专家控制技术实现对复杂过程的控制[3-4]。总之,大时滞参数时变复杂过程控制是控制工程中的难点。
1.2过程控制论特性
轧钢加热炉燃气燃烧过程除了大时滞参数时变的特性外,由于是复杂过程,受多种不确定性因素影响,如燃气由焦炉、高炉等混合煤气组成,无论燃气的组分或燃质都具有不确定性(包括随机性)。钢坯进出炉也会引起热扰动,又是大惯性过程,动态控制过程充满了不确定性,因此导致过程时滞是未知的、时变的,存在严重的非线性。过程参数也因不确定性导致其具有未知性、时变性、随机性、分散性以及变量间的关联耦合性,很难用定量分析方法给予精确的数学表达,实质上燃气燃烧过程是一个不确定性复杂动态过程的控制问题。采用基于数学建模的范式控制方法,如传统的PID控制或者基于现代控制理论的优化控制方法等,是难以获得预期理想控制效果的[5-6]。因此,必须探讨与过程控制论特性相匹配的控制策略。
2 控制策略与控制算法
智能控制是在解决具有高度复杂与不确定性以及控制性能要求越来越高的背景下产生的,是传统控制发展的高级阶段,是基于对多种科学方法、多种先进技术与当代多种前沿学科知识的高度综合和利用发展起来的。人类智能反映在对事物的观察、认识、学习与理解的能力方面,也包括理解与适应事物动作行为的控制能力。实质上,智能控制是一种在实施控制过程中无须进行人工干预的自动控制技术,强调的是自主驱动系统(或过程)的状态是否达到期望的控制目标。在智能控制中,值得注意的是仿人智能控制,它直观地模拟人的控制行为、经验与技巧,是一种基于知识的智能模型控制。
2.1仿人智能控制策略
燃气燃烧是瞬息万变的,其优化控制必须在线实时完成。正如驾驶员在高速路上驾驶车辆行驶一样,驾驶员就是根据理想行驶轨迹与实际行驶轨迹的角度偏差方向、偏差大小以及偏差的变化趋势驾驶车辆行驶的。仿人智能控制(human simulated intelligent controller,HSIC)策略就是直观模拟人的控制行为[7-9],控制模型如图1所示。图1中,r(t)、e(t)、p(t)、y(t)分别表示过程的输入、过程误差、HSIC控制器输出与过程响应输出。

图1 广义知识控制模型Fig.1 Generalized knowledge control model
2.2仿人智能控制算法
如果用è表示过程误差的变化率,可以构成如图2所示的误差相平面。由于过程误差e与过程误差变化率è均是可检测的,基于自动控制理论和人工智能系统,可以总结出该控制策略模拟人类控制行为的两种特征模式:当eè>0时,即过程状态位于第1和第3象限时,过程将呈现出误差增加的趋势;当eè<0时,即过程状态位于第2和第4象限时,过程将呈现出误差减小的趋势。
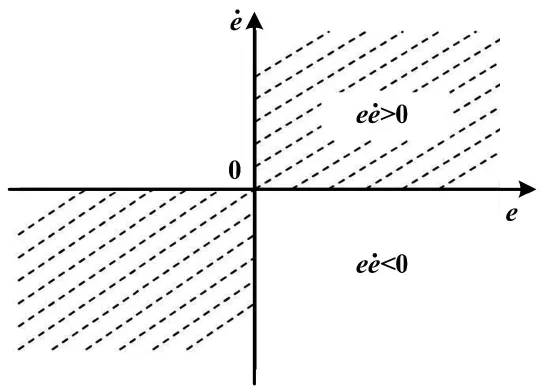
图2 误差相平面Fig.2 Error phase plane
由误差相平面分析可知,HSIC的基本控制策略可归纳为:①如果eè≥0并且e +è≠0,则可取比例加半微分(proportion and half derivation,PH-D)控制模式;②如果eè≤0或者e =è = 0,则可取半开环(half open-loop,HO)控制模式。
HSIC原型控制算法可总结为:。
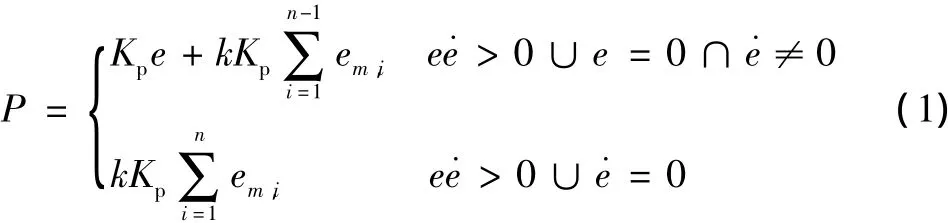
式中: P、Kp、k、e、è和em,i分别为HSIC控制器的输出系数、比例系数、拟制系数、过程误差、过程误差变化率和第i个误差的峰值。
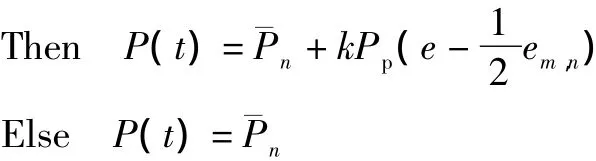
结合HSIC基本控制算法,并将过程操作者的控制经验、技巧与控制智慧融合到HSIC控制算法中,借助结构化英语描述方法,其过程控制算法可设计为:

3 仿真实验及其分析
为了验证仿人智能控制策略的优势,仿真中以PID + Smith预估控制为参照,将过程不确定性因素影响等价为过程参数变化,然后分别在无外界干扰与受外界干扰两种情况下,施加单位阶跃输入于控制过程,最后比较两种控制算法的过程输出响应,研究仿人智能控制策略的鲁棒性。如果鲁棒性强,那么该控制策略就是可取的,因为它能兼顾过程响应时间、调节时间、过程超调与稳态控制精度等技术指标的需要。仿真中,假设被控过程模型如式(2)所示。

式中: K为比例系数; T1、T2分别为时间常数,s;τ为过程时间时滞,s。
如果取: K =4.134 s,T1= 1 s,T2= 2 s,τ= 2 s,则其过程模型为:

在PID + Smith预估控制与仿人智能控制HSIC两种控制策略作用下,当过程的输入为单位阶跃时,其过程响应如图3所示。图4、图5和图6分别为τ=10 s、τ= 20 s和τ= 10 s时加入一个幅度为0.5、宽度为0. 2 s脉冲干扰时两种控制策略的响应比较曲线。
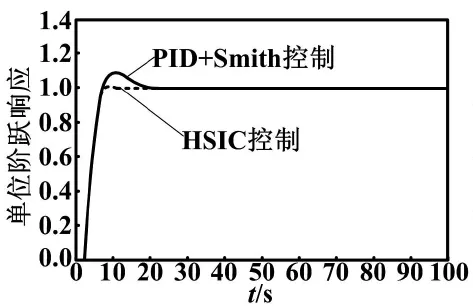
图3 τ=2 s时的响应曲线Fig.3 Response curves at τ=2 s

图4 τ=10 s时的响应曲线Fig.4 Response curves at τ=10 s
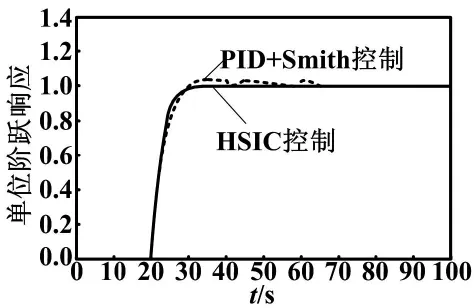
图5 τ=20 s时的响应曲线Fig.5 Response curves at τ=20 s

图6 τ=10 s脉冲干扰响应曲线Fig.6 Response curves at τ=10 s
分析上述过程响应可知,无论时滞变化还是外部脉冲干扰对仿人智能控制策略几乎没有影响,智能控制策略在鲁棒性、响应时间、调节时间、过程超调与稳态控制精度等方面均表现出优秀的控制品质。
4 结束语
由于仿人智能控制策略总是基于当前控制周期误差特征模式下决定各控制周期的操作控制模式与控制算法,因此能实时矫正过程误差。鉴于该策略无需数学建模,这是其他控制策略难以与之相比的。仿真结果验证了该控制策略的强鲁棒性、高控制精度,对大时滞参数时变过程的控制是一种可供借鉴的控制策略。
参考文献
[1]李太福,冯国良,钟秉翔,等.一类不确定复杂系统的控制策略分析[J].重庆大学学报:自然科学版,2003,26(9): 4-7.
[2]陈军.步进式加热炉燃烧过程智能控制策略及应用[D].长沙:中南大学,2004.
[3]杨志,李太福,盛朝强,等.基于仿人智能的复杂关联系统控制[J].重庆大学学报:自然科学版,2002,25(7): 9-11.
[4]熊仁权,乔正洪.基于仿人智能的供水系统控制策略[J].四川兵工学报,2012,33(1): 76-78.
[5]李士勇.模糊控制神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,2002.
[6]陈雯柏,高世杰,吴细宝.一种基于HMCD的仿人机器人单杠运动控制策略[J].智能系统学报,2012,7(6): 1-5.
[7]易继锴.智能控制技术[M].北京:北京工业大学出版社,2004.
[8]李祖枢,涂亚庆.仿人智能控制器[M].北京:国防工业出版社,2003.
[9]张翠英,田建艳.基于仿人智能控制理论的钢坯加热炉多模态控制策略[J].太原科技大学学报,2008,29(1): 12-15.
Human Simulated Intelligent Control of Complex Process with Large Time Lag and Time-varying Parameters
雷正桥
(重庆工业职业技术学院教务处,重庆401120)
摘要:针对大时滞参数时变复杂过程难于控制的问题,探讨了一种仿人智能控制策略。剖析了复杂过程的控制难题,研究了控制策略,分析了仿人智能控制器的特性,构造了一种仿人智能的多模态控制算法。以燃气加热炉燃烧过程控制为例,以PID + Smith控制为参照,仿真实验对比研究验证了该控制策略在响应快速性、调节时间、超调性能与稳态控制精度方面的良好控制品质与强鲁棒性能。研究表明,提出的仿人智能控制策略是可行与可取的。
关键词:大时滞时变参数复杂过程仿人智能控制多模态控制PID神经网络控制
Abstract:Aim at the puzzle of controlling the complex process with large time-lag and time-varying parameters,the human simulated intelligent control strategy is explored.The control difficulties of complex process control are analyzed,and the control strategy is studied.The characteristics of human-simulated intelligent controller are analyzed,and the multi-modal control algorithm based on human simulated intelligence is constructed.Taking the combustion process control of gas heating furnace as an example and the PID + Smith control as a reference,the simulation experiment contrast research shows that this control strategy has good control quality and stronger robust performance in response to the speediness,adjusting time,overshoot and steady state control accuracy.The research shows that the proposed control strategy is feasible and advisable.
Keywords:Large time lag Time-varying parameters Complex process Human simulated intelligent control Multi-modal control PID Neural network control
中图分类号:TH-39; TP273
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201603018
修改稿收到日期:2015-07-21。
