车载应答器编程天线建模及优化研究
2016-05-08朱林富赵会兵
朱林富, 赵会兵 , 梁 迪,2
(1. 北京交通大学 电子信息工程学院,北京 100044;2. 北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044)
应答器信息传输系统是车地之间信息传输的一种解决方案[1-3]。应答器报文包括移动授权、轨道数据等,需要提前写入应答器中[4]。为了确认应答器工作正常,需要有一种能够读取、写入应答器报文的设备[5],应答器编程可实现写入报文。
目前,应答器编程都是使用便携式应答器编程设备人工操作完成。新线安装的应答器,需要在仓库内提前写入报文或安装后现场写入。在线路信息改变或新安装应答器报文有误时,应答器内部的报文需要在现场重新写入。人工操作效率低下,工作环境艰苦,常带来诸多问题。例如特定的报文没有写入对应编号的应答器;遗漏需要更新报文的应答器;能够被便携式编程设备正确读取报文但不能被车载BTM正确读取,因为二者距离应答器的高度不同。便携式应答器编程设备在编程过程中放置在应答器上,如图1所示。为了提高应答器编程的效率,提出使用车载应答器编程设备,编程天线集成在车载天线中,安装有车载应答器编程设备的维护车在通过应答器上方时,即刻完成应答器的报文编程,同时按照BTM接收条件进行接收确认。全部编程和确认工作自动、非接触完成,工人不需要沿铁路线步行改写应答器报文。

图1 既有便携式应答器编程设备
1 车载编程设备
车载应答器编程设备将处理控制电路与3个天线分开放置。处理控制电路放置在车厢中,3个天线安装在车厢底部。天线发射的电磁波不影响处理控制电路的正常工作,因此能够增加天线发射功率,从而增加作用高度。如图2所示,车载编程设备有4个模块,包括射频能量模块、接收比较模块、编程模块和处理控制电路模块。
车载应答器编程设备需要解决的理论问题包括近场感应的能量传输和磁场分布问题。欲达到远距离无接触的目标,需要确定天线形状、天线尺寸和发射功率,分析其能量传输和磁场分布。
2 应答器编程天线建模和仿真
应答器编程是一种基于电磁感应的射频识别(RFID)技术,其能量和数据的传输属于近场感应电感耦合。根据研究的逻辑顺序,依次对天线形状、天线尺寸、发射电流幅度、横向偏移、抗干扰特性5个问题进行分析研究。
2.1 编程天线形状
应答器编程天线采用8字形设计,射频能量天线采用矩形设计,这种天线间的异构设计使得编程电路在列车正常通过时不被激活,不影响应答器的正常安全数据传输。
天线的形状决定面积,影响磁通量大小,进而影响感应电压和激活距离。编程天线建模分为空间磁场计算和激活距离计算两部分,具体步骤如下。
步骤1设置静态参数,如天线边长、电流幅度、频率、天线品质因数Q、编程电路启动电压等,其中编程电路启动电压由编程芯片工作电压确定,本文取1.8 V。
采用矩形8字形时如图3所示,ABO′CD-EFGHO′是车载编程设备中的编程发射天线,WJOKL-UMNPO是地面应答器中的编程接收天线,接收来自于发射天线的能量和数据。发射信号采用ASK调制,电流表达式为
I(t)=anAcos(2πfct+φ0)
( 1 )
式中:an为第n位二进制数据,值为0或1;A为载波幅度;fc为载波频率;φ0为初始相位。
如图3所示,应答器编程接收天线的中心点O作为坐标系原点,坐标为(0,0,0);发射天线中心点O′的坐标为(x′,0,0)。两天线边长见表1和表2。

表1 编程发射天线

表2 编程接收天线
步骤2根据Biot-Savart定律计算得到电流元在空间任意点处激发的磁感应强度。通有高频电流的EF边在编程接收天线包围区域内任意一点Q处产生磁感应强度B1,电流方向如图3中箭头所指。Q的坐标为(x,y,0)。线段QR垂直于EFGHO′平面,R点坐标为(x,y,z)。线段RS垂直于线段EF,S点坐标为(x,-l2sinβ,z),线段RT垂直于线段QS。根据Biot-Savart定律,得到磁感应强度的计算表达式[6,7]为
( 2 )
式中:d为点Q和线段EF之间的距离。
( 3 )
穿过线圈UMNPO的磁通量由B1的Z轴方向分量B1z决定。

( 4 )
使用相同的计算方法,可以得到其他边在Q点产生的磁感应强度。
发射天线的FG, GH, HO′, O′E, AB, AD, CD, CO′, O′B在任意点Q处分别产生磁感应强度B2,B3,B4,B5,B6,B7,B8,B9,B10。
线圈ABO′CD和EFGHO′在Q点处产生磁感应强度B,B的Z轴分量为Bz。
Bz=B1z+B2z+B3z+B4z+B5z+
B6z+B7z+B8z+B9z+B10z
( 5 )
步骤3积分得到通过接收天线的磁通量。线圈UMNPO分成两部分,包括三角形POU和矩形UMNP。穿过线圈UMNPO的磁通量Φ1为

( 6 )
线圈WJOKL分成两部分,包括三角形KOJ和矩形WJKL。穿过线圈WJOKL的磁通量Φ2为

( 7 )


(a)感应电压

(b)简化的连接关系图4 编程接收天线的感应电压
根据法拉第电磁感应定律,得到感应电压的表达式为
( 8 )
( 9 )
Uinductive=U1inductive+U2inductive
(10)
Uoutput=Q·Uinductive
(11)
当θ角和β角都为90°时,发射天线和接收天线可以分别简化为两个矩形线圈的串联。
步骤5感应电压大于激活电压阈值时,编程电路被激活,据此计算激活距离。
下文以实际案例对建模方法进行验证。变量取值见表3,生成感应电压如图5所示,激活距离be为0.649 6 m。

表3 变量取值

图5 矩形8字形天线输出电压
8字形天线采用圆形,如图6所示。采用建模步骤1~步骤5进行分析,过程同上述矩形8字形天线,区别在于对圆面积进行积分计算磁通量。与矩形8字形天线占用相同安装面积,发射天线圆半径为0.15 m;与矩形8字形接收天线占用相同安装面积,接收天线半径为0.03 m。圆8字形天线输出电压如图7所示,大于阈值电压1.8 V的范围分别是:(a,b)为(-0.665 5,-0.346 4),(c,d)为(-0.252 4,0.252 4), (e,f)为(0.346 4, 0.665 5)。(a,b)和(e,f)是旁瓣内的激活距离,由于编程时仅使用主瓣内的能量和数据,所以(a,b)和(e,f)舍弃。(c,d)距离为0.504 8 m,即圆8字形天线的激活距离为0.504 8 m。占用相同安装面积的条件下,矩形8字形天线的激活距离为0.649 6 m,大于圆8字形天线,因此天线形状优先选择矩形8字形。

图6 圆8字形天线

图7 圆8字形天线输出电压
2.2 编程天线尺寸
按照建模步骤,分别进行步骤1~步骤5,与2.1节不同在于,需要设置不同的天线边长,以便进行比较。
在仿真中,变量取值见表3,边长取值见表4,编程发射天线根据边长大小,分为“小”、“中”、“大”3种类型。编程接收天线的输出电压如图8所示,x′为编程发射天线中心点O′的X轴坐标。应答器编程电路的激活阈值电压为1.8 V,在图8中标记为U1。 “中”型天线在be范围(-0.324 8,0.324 8)内,应答器编程电路能够被激活,激活距离为0.649 6 m。当安装有车载编程设备的维护车停在范围(-0.324 8,0.324 8)内时,编程电路能够被激活。 “大”型天线的激活距离af为0.808 8 m。对于“小”型天线,c是-0.183 2 m,d是0.183 2 m,但范围(-0.183 2,0.183 2)的中间部分低于1.8 V,在低于1.8 V时,编程电路不能被激活,激活距离小于0.366 4 m。从图8可以看出,随着编程发射天线边长的增加,应答器编程电路的激活距离也在增加。 “中”型和“大”型发射天线都能满足能量需求,但“大”型天线会占用较多车体空间,造成安装和维护的不便。在满足需求的前提下,优先选择体积紧凑的“中”型天线。

表4 发射天线边长 m

图8 接收天线输出电压随发射天线边长变化曲线
2.3 发射天线电流幅度
按照建模步骤1~步骤5,计算感应电压和激活距离。与2.1节不同在于,需要设置不同的发射电流幅度,以便进行比较。
l1,l2,l3取表4中“中”型天线的值。发射天线电流信号幅度从2 A变化到6 A,分别取值2 A、4 A、6 A,如图9所示。电流幅度取值6 A时,g是-0.361 7 m,q是0.361 7 m,激活距离为0.723 4 m。电流幅度取值4 A时,j是-0.324 8 m,p是0.324 8 m,激活距离为0.649 6m。电流幅度取值2 A时,m是-0.247 3 m,n是0.247 3 m,在范围(-0.247 3,0.247 3)的中间部分低于1.8 V,编程电路不能被激活。从图9可以看出,随着发射电流的增加,发射功率在增加,应答器编程电路的激活距离也在增加。发射电流为4 A和6 A时,都能满 足能量需求,从节能优化和串扰角度考虑,选择发射电流为4 A。

图9 接收天线输出电压随发射电流变化曲线
维护列车在为应答器编程时,接近应答器窗口后,降低车速,以20 km/h的速度通过应答器。以中型矩形编程天线、发射电流4 A为例,激活距离为0.649 6 m,列车速度为20 km/h,则作用时间为117 ms。需要将1023位报文写入应答器,通信速率为564 kbit/s,单纯计算报文写入时间为1.81 ms,加上激活启动时间和报文内容校验核对时间,117 ms时间足够。
2.4 横向偏移
由于列车在运行中会产生垂直铁轨的横向移动,如果横向偏移距离过大,无法激活编程电路,所以应研究接收天线感应电压和发射天线横向移动距离之间的关系。
按照建模步骤1~步骤5,计算感应电压。与2.1节不同在于,本节只涉及感应电压,不涉及激活距离,因为发射天线只沿Y轴方向移动,在X轴方向没有移动。

图10 车载编程天线横向偏移


图11 接收天线输出电压随横向位移变化曲线(x′=0)
2.5 抗干扰
正常工作模式下,当列车经过应答器时,BTM的矩形射频能量发射天线向应答器发射27.095 MHz射频能量信号。对于应答器的编程接收天线而言,27.095 MHz的能量信号属于干扰。从安全性角度考虑,编程电路不能被干扰信号激活,否则内部报文有被改写的危险。因此,本节对矩形射频能量天线和8字形编程接收天线的感应过程进行研究。
按照建模步骤1~步骤5,计算感应电压和激活距离。与2.1节不同在于,发射天线为矩形,不需要计算激活距离,只需考虑能否被激活。

(a)感应电压

(b)简化电连接关系图12 正常工作模式下编程接收天线感应电压
应答器内部的编程接收天线接收到磁场能量并感应出电压。编程接收天线的两个线圈接收相同方向的磁场能量,磁场的变化趋势相同,所以两个线圈的感应电压方向相反。假设矩形射频天线中的电流增加,所以磁场强度增加。根据楞次定律,下方的编程接收天线生成方向向上的感应磁场阻止接收到的磁通量增加。根据右手螺旋法则,线圈WJOKL和UMNPO分别产生顺时针方向的感应电流,如图12(a)所示。编程接收天线的输出电压是两个线圈感应电压之差,U3inductive-U4inductive>0,总电流方向如图12(b)中箭头所示。
射频能量信号的频率为27.095 MHz,幅度为0.7A。矩形天线的长和宽分别是0.3 m、0.3 m。编程接收天线变量取值见表3。编程接收天线的感应电压如图13所示,实线代表右侧线圈输出电压,虚线代表左侧线圈输出电压,点划线代表整个编程接收天线输出电压。Umax为1.021 2 V,小于编程电路激活阈值电压1.8 V,所以应答器编程电路在正常工作模式下不被激活。
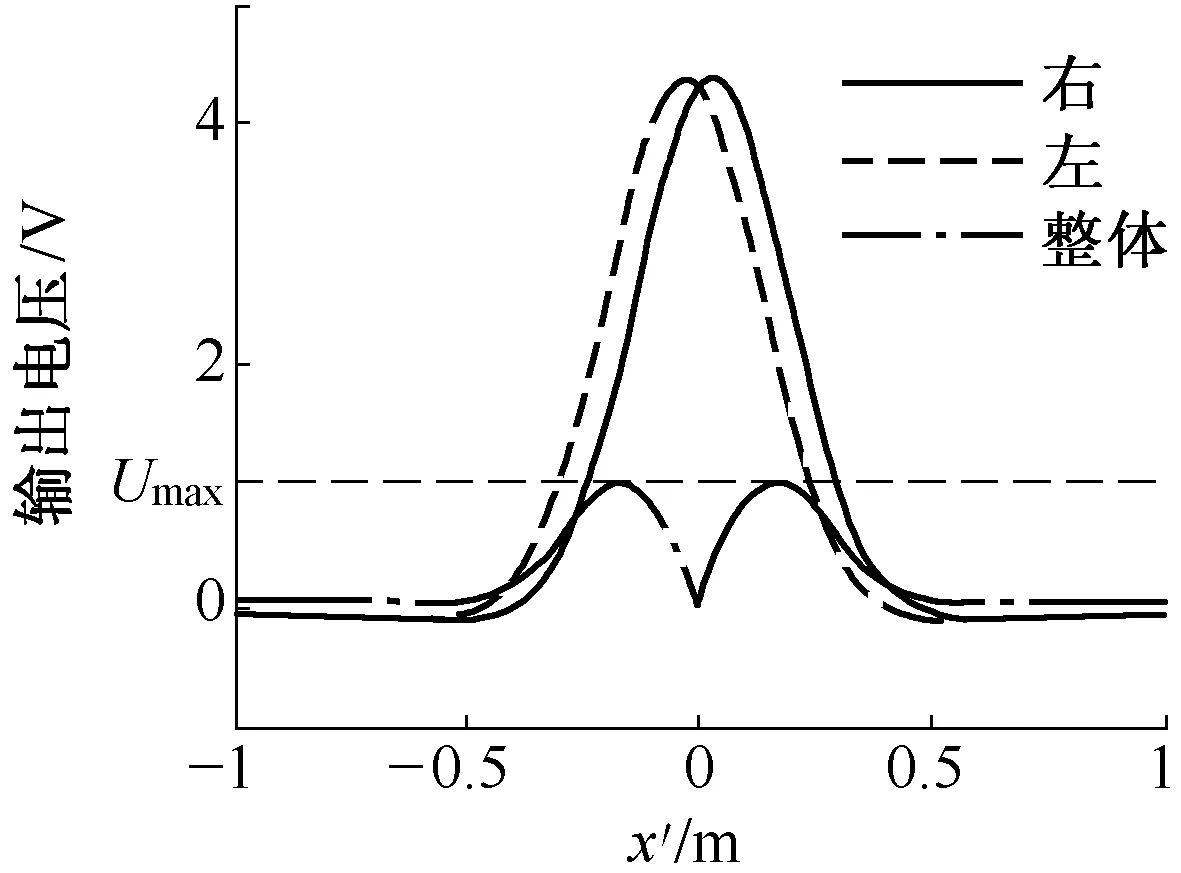
图13 正常工作模式下编程接收天线的输出电压
3 优化
天线的优化对比项目见表5,根据以上研究内容,以激活距离作为评价标准,得到优化结果,优先选择矩形8字形、4 A、中型编程天线。
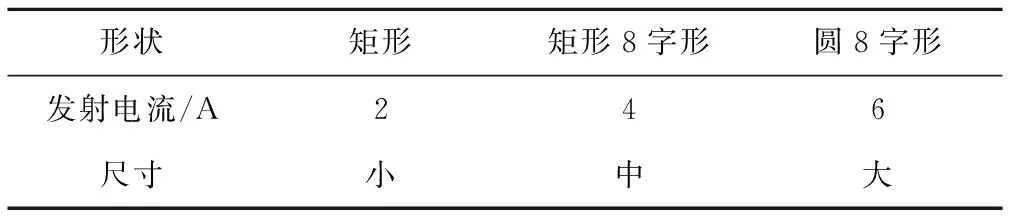
表5 优化对比项目
4 实验验证
搭建测试平台对模型进行验证[8],如图14所示。进行实验时,实际可获得的元器件参数近似等于理论计算所需参数,这样就会引入回波损耗和调谐误差。由于实验室条件限制,信号发生器的输出功率不够大,在进行测量时,所用线缆会引入串扰误差,所以对上述模型进行定性分析,分析接收天线输出电压的变化趋势。

图14 测试平台
发射天线为矩形8字形天线,8字形接收天线的输出电压如图15所示。

图15 8字天线发射8字天线接收
车载编程设备的编程发射天线采用8字形设计,产生相反方向的磁力线;地面应答器的编程接收天线也采用8字形设计,两个接收环收到相反方向的磁通量,产生相同方向的电流,两个接收环的感应电流叠加后增大,保证为编程电路提供足够的能量。根据法拉第电磁感应定律,输出电压的大小由磁通量的变化率决定,磁通量为磁感应强度与面积的乘积积分。磁感应强度的变化率由输入信号频率决定,满足线性叠加原理。在输入信号频率和接收面积确定的情况下,不同位置叠加后的磁感应强度不同,所以输出电压不同。图15中,输出电压的最大值较小,所以两个旁瓣较为明显。图5输出电压的最大值较大,所以两个旁瓣不明显。比较图15和图5,输出电压随位移的变化趋势一致。
将图14测试平台中的发射天线更换为矩形射频发射天线,8字形接收天线的输出电压如图16所示。

图16 矩形天线发射8字天线接收
在正常工作模式中,BTM的射频能量发射天线采用矩形设计,产生相同方向磁力线;地面应答器编程接收天线的两个环收到相同方向的磁通量,产生相反方向电流,能量相互抵消,编程电路不被激活,编程接收天线不影响应答器的正常工作。比较图16和图13,输出电压随位移的变化趋势一致。
5 结论
车载应答器编程设备的控制电路安装在车厢内,编程天线集成在车载天线中,安装在车厢底部,其垂直作用距离满足车载自动化编程的要求。仿真结果显示,当垂直作用距离满足自动化车载编程时,车载编程设备能够传输足够的能量激活应答器编程电路。编程接收天线采用8字形,在正常工作模式时不被激活,提高了安全性,实验结果验证了模型的正确性。
本文研究的应答器编程天线建模方法,对基于8字形天线的地铁列车精确定位、交叉感应环线地-车通信系统研究具有一定的理论价值。
参考文献:
[1]Union Industry of Signalling. SUBSET-036-V2.4.1. Form Fit Function Interface Specification for Eurobalise [S]. Brussels: Alstom Ansaldo Bombardier Invensys Siemens Thales, 2007.
[2]Union Industry of Signalling. SUBSET-085-V2.2.2. Test Specification for Eurobalise Form Fit Function Interface Specification[S]. Brussels: Alstom Ansaldo Bombardier Invensys Siemens Thales, 2007.
[3]Mohammad Ali Sandidzadeh, Ali Khodadadi. Optimization of Balise Placement in a Railway Track Using a Vehicle, an Odometer and Genetic Algorithm [J]. Journal of Scientific & Industrial Research, 2011, 70(3): 210-214.
[4]SHARMA R,LOURDE R M. Crosstalk Reduction in Balise and Infill Loops in Automatic Train Control [C]// The 11th International Conference on Intelligent Engineering Systems.New York:IEEE Press,2007: 39-44.
[5]HAN Y, LIU X P, WANG M Y. The Design and Implementation of a Wireless Data Acquisition and Transmitting System for Euro-balise [J]. Journal of Circuits, Systems, and Computers, 2013, 22(9): 169-176.
[6]梁迪,赵会兵,全宏宇,等. 应答器传输系统的电磁耦合机理及工程安装优化研究[J]. 铁道学报, 2014, 36(5): 64-70.
LIANG Di, ZHAO Huibing, QUAN Hongyu, et al. Research on Electromagnetic Coupling Mechanism and Mounting Parameter Optimization of Balise Transmission System [J]. Journal of the China Railway Society, 2014, 36(5): 64-70.
[7]邝向军. 矩形载流线圈的空间磁场计算[J]. 四川理工学院学报:自然科学版, 2006, 19(1): 17-20.
KUANG Xiangjun. Calculation of Space Magnetic Field in Rectangular Current Coil [J]. Journal of Sichuan University of Science & Engineering:Natural Science Edition, 2006, 19(1): 17-20.
[8]罗丽燕,刘中田,周果. 护轨对应答器干扰的仿真研究[J]. 铁道学报,2014,36(10):59-64.
LUO Liyan, LIU Zhongtian, ZHOU Guo. Simulation of Interference of Guardrail in Balise [J]. Journal of the China Railway Society, 2014, 36(10): 59-64.