基于ADAMS槽轮机构动力学仿真
2016-05-07宋国亚赵俊鹏常笑鹏
宋国亚, 王 晖*, 赵俊鹏, 常笑鹏
(1.长春工业大学 机电工程学院, 吉林 长春 130012;
2.长春工业大学 应用技术学院, 吉林 长春 130012)
基于ADAMS槽轮机构动力学仿真
宋国亚1,王晖1*,赵俊鹏1,常笑鹏2
(1.长春工业大学 机电工程学院, 吉林 长春130012;
2.长春工业大学 应用技术学院, 吉林 长春130012)
摘要:首先对常规槽轮机构的运动特性进行理论和仿真分析,在此基础上建立了具有大转停比槽轮机构的三维模型,并对其运动过程进行动力学分析,结合ADAMS对大转停比槽轮机构进行应力和运动仿真分析。
关键词:槽轮机构; 转停比; ADAMS仿真计算
0引言
随着我国经济的迅猛发展,在过去的20年里,我国医药产业市场呈现了高速发展和扩张的态势,对于医药制品,全球的市场需求量平均每年增长率在10%以上,远远高于GDP的增长速度。众所周知,在众多的医药制品中,用安瓿针剂瓶包装的药用针剂占据了很大的比例,安瓿针剂自动上料设备是制药企业实现产品自动化生产的关键设备,然而目前的安瓿针剂自动上料设备由于其关键传动件槽轮机构无法实现大的转停比,国内外一些学者对槽轮机构进行了相关研究。
文献[1]研究了槽轮机构存在的一系列固有缺陷,比如其动程不可调节,转角也不能太小。文献[2]指出了槽轮机构在起、停时的加速度大,有冲击,并随着转速的增加或槽轮槽数的减少而加剧问题。为了克服槽轮机构这种结构缺陷,文献[3]提出了一种改进措施,其通过与其他机构,如连杆、凸轮、齿轮机构组合来改善槽轮机构的动力特性。组合机构虽然在不同程度上改善了槽轮机构的动力特性,但由于组合机构的结构较为复杂,因而增加了设计的难度。由于构件数目的增多,机构占用的空间也有所增大,同时也增大了积累误差,从而影响了定位精度,因此其具体应用价值较低。文献[4]对槽轮机构的结构进行了改进,将直线导轨槽轮机构改成带有曲线弧度的导轨,以减少运行时的冲击。文中针对目前常规的槽轮机构不能实现大转停比这一情况,在研究了常见槽轮机构的基础上设计了一种能够实现大转停比的新型槽轮机构,并对其进行了动力学分析,以实现安瓿针剂的自动上料。
1多体系统动力学和ADAMS软件介绍
多体系统的动力学的分析和仿真是伴随着计算机科学技术的发展而不断完善的。多体系统是由多个物体在运动副连接下形成比较复杂的机械系统。使用计算机强大的计算功能对较复杂的系统进行动力学分析和仿真是多体系统动力学分析的主要目的。在多体系统中对物体进行分析时可以将系统中刚体的微变形量忽略不计,并可作为刚体来处理,该类型的系统一般处于低速度运动状态。而多柔性体系统是系统在行使动作过程中会出现多物体在较大区域运动并与物体的弹性变形发生耦合,所以需要将物体作为柔性体。通过以上对多体系统的了解和认识,可知文中涉及到的大转停比槽轮机构应属于多体系统的范围之内。
对于多体系统进行运动和动力学分析需要借助强大的动力学分析软件,目前,世界上使用范围最广泛的通用多体动力学分析软件是美国MDI公司开发的机械系统的自动动力分析(Automatic Dynamic Analysis of Mechanical System, ADAMS)、LMS-CADSI 公司开发的动力学分析和设计系统(Dynamic Analysis and Design System, DADS)以及德国INTEC 公司开发的SIMPACK 等[5-7]。ADAMS是当今世界上最具有权威的多体动力学模拟样机模型软件,用户可以通过完善的人机交互图形环境来创建物体的几何模型,通过多体系统运动学和动力学理论中的拉格朗日方法建立系统的动力学基本方程,可对虚拟的系统进行静力、运动和动力分析,并输出系统中运动零件的位移变化、速度和加速度曲线和作用力变化曲线,ADAMS软件可用于评测机械系统的性能、运动的范围、检测碰撞力度、峰值载荷量以及计算输入载荷等。
2大转停比槽轮机构尺寸设计
槽轮机构如图1所示。

图1 槽轮机构
通过分析图1的外槽轮机构,当主动转盘1转动一周,从动槽轮2的转动所需时间t2与主动拨盘转一周的时间t1之比称为槽轮机构的运动系数,用k来表示,即:
(1)
因为主动转盘一般为匀速回转,所以时间之比可以通过拨盘转角的比来表示。通过图1所示的单圆销的槽轮机构,时间t2和t1所对应的转动角分别是2α1和2π,标准的槽轮机构为了避免刚性冲击,圆柱销从开始进入到脱离径向直槽的瞬间,圆柱销线速度的方向与径向直槽中心线重合,假设槽轮有z个均布槽,则2φ2=2π/z,将上述关系代入式(1)中,得外槽轮机构的运动系数为:
(2)
如在拨盘上等角度分布n个圆柱销,则当拨盘等速转动一周的过程中,槽轮会被圆柱销拨动n次,故机构的运动系数是单圆柱销的n倍,即
(3)
又因k值应小于或等于1,即
(4)
由式(4)可得到槽数与圆柱销的关系见表1。

表1 槽数与圆柱销数量关系
根据对安瓿针剂自动给料设备翻盘机构中槽轮机构转停时间的分析,确定了该槽轮机构为运动系数K=1/12的单销四槽均匀分布的外槽轮机构,由于设计过程较为繁琐,设计过程没有一一列出,具体尺寸见表2。

表2 尺寸列表
3槽轮机构接触动力学方程
因为外槽轮机构中径向槽的型面属于直线型,根据齿轮啮合成形理论分析,槽轮径向槽的线型不在共轭曲面范畴中,如果把槽轮机构中的从动槽轮和主转动滚轮的接触看成一对互相啮合的共轭曲面,这样可以将齿轮啮合原理应用到主动轮和从动槽轮的相互作用上,并通过啮合模型对其进行分析,用n个广义坐标q表示从动槽轮的运动,建立的动力学方程为[8]:
(5)
式中:g----接触作用点的距离;
Fn----接触力的法向分力,一般可以通过方向接触约束的惩罚函数求得。
通过引入不穿透接触的单边约束来表示槽轮与拨轮之间接触的过程:

(6)
式中∈Rn----分别表示动力系统的位移、速度和加速度矢量;
λ∈Rm----拉格朗日微分算子;
t∈R----时间阵;
M∈Rn×n----系统的广义质量矩阵;
Φq∈Rm×n----约束方程的雅克比阵;
Q∈Rn----广义力的矩阵;
Φ∈Rm----位置约束方程。
当作用的两齿面彼此穿透时,通过函数的惩罚因子将接触力表示成为惩罚量的状态函数,即接触变形函数。
在槽轮动力学公式中引入接触约束条件后,就得到含有接触的槽轮动力学方程:
(7)
4槽轮动态啮合接触计算模型
根据经典接触力学理论,可以将槽轮机构中圆柱销与径向槽相互作用的法向接触力用弹簧阻尼模型来等效。该模型的广义表达式为[9]:
(8)
式中:K----啮合面齿廓的等效接触刚度;
δ----接触作用点的法向变形量;
n----非线性弹性力幂指数,n≥1;
c(δ)----啮合作用过程中的阻尼因素;

根据赫兹接触的理论模型,可导出两物体接触刚度的计算公式如下:

(9)
式中----两齿廓的表面在啮合作用点的综合曲率半径;

μ----材料的泊松比。
两物体作用中的阻尼计算可采用兰卡拉尼和尼克瓦斯的基于能量损耗提出的法向方向形变量的非线性滞后阻尼模型:
(10)
式中:c----法向方向变形量的阻尼系数;
e----碰撞物体的恢复系数;
v----齿面碰撞的速度;
a----非线性阻尼力幂指数。
在槽轮受力转动的过程中,曲柄和轮槽之间是相对滑动的状态。所以,将接触力的切向分力定义为库伦摩擦模型,表达式为:
(11)
式中:Ff----啮合作用点的滑动摩擦力;
μd----动摩擦因数;
5ADAMS模型建立流程
通过上述对槽轮机构接触过程中的状态分析,需要建立其啮合时候的碰撞模型、圆柱销与槽轮接触时的接触模型,以及两者之间由于存在摩擦而建立的库仑摩擦模型,通过ADAMS软件,根据上述需要去设置模型并加载模型中的各个参数,就可以简单方便地建立起整个过程中所需要的任何模型,节省了科研人员大量的时间和精力。
在ADAMS中建立槽轮刚体模型所需要的参数主要包括:主动拨盘和从动槽轮的外形结构尺寸、弹性模量、材料属性、碰撞系数、连接副、拨轮初始速度、接触中滑动摩擦系数等。通过上述对槽轮机构几何尺寸的设计和对其整个运动过程中动力学模型和接触计算模型的分析,仿真所需的参数数值都已经确定并输入到了ADAMS软件中。
首先,通过ADAMS菜单栏中的Setting将建模坐标系设置为笛卡尔坐标系,单位制设置为MKS模式,并将工作栅格的尺寸调成10 mm×10 mm的规格,重力加速度设置成9.8 N/kg。
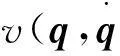
然后,通过ADAMS/View操作模块中Maintools中的几何建模功能按照设计好的槽轮机构的尺寸建立模型,并通过调色功能将拨轮的颜色设置为红色,槽轮的颜色设置为粉色,建立好的模型如图2所示。
1.槽轮; 2.拨轮
在软件中将槽轮机构的实体模型建立好后,将零件part1、part2、part3分别命名为拨轮、槽轮、圆柱销,并通过鼠标右键点击属性对话框设置材料的相关属性,材料属性主要包括材料的型号、密度、杨氏模量和泊松比,设置好的参数如图3和图4所示。

图3 拨轮材料属性

图4 槽轮材料属性
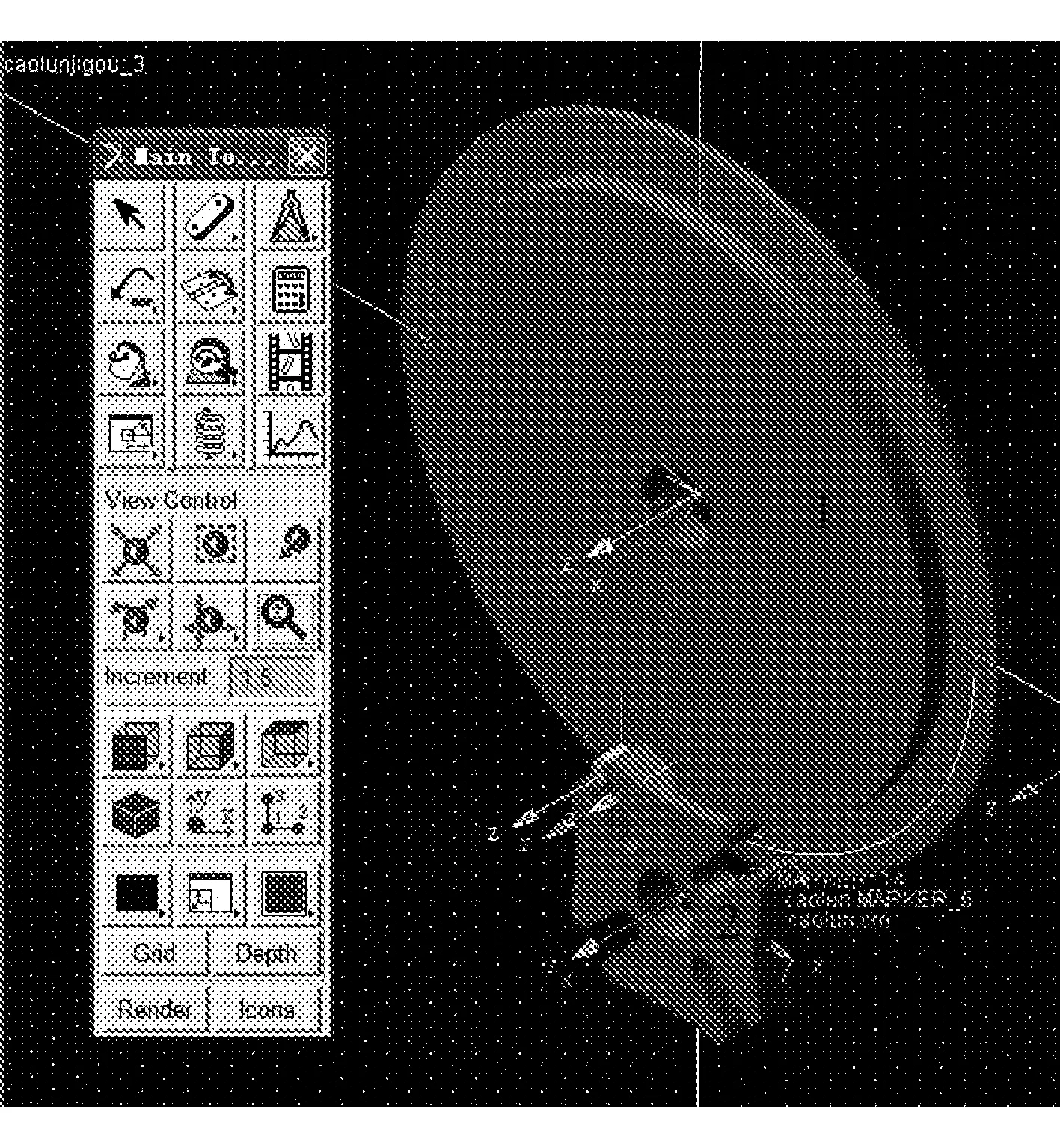
然后为模型添加运动副,一共建立3个转动副和一个接触副,3个转动副分别建立在地与拨轮、地与槽轮、圆柱销与拨轮之间;接触副建立在拨轮与槽轮之间,接触副选择SOLIDE TO SOLIDE类型,由于圆柱销和槽轮在初始接触时会产生碰撞,将Normal Force设置成 Impact ,并且在两者作用过程中会有切向摩擦力的存在,所以需要设置库仑力的参数,具体参数如图5所示。
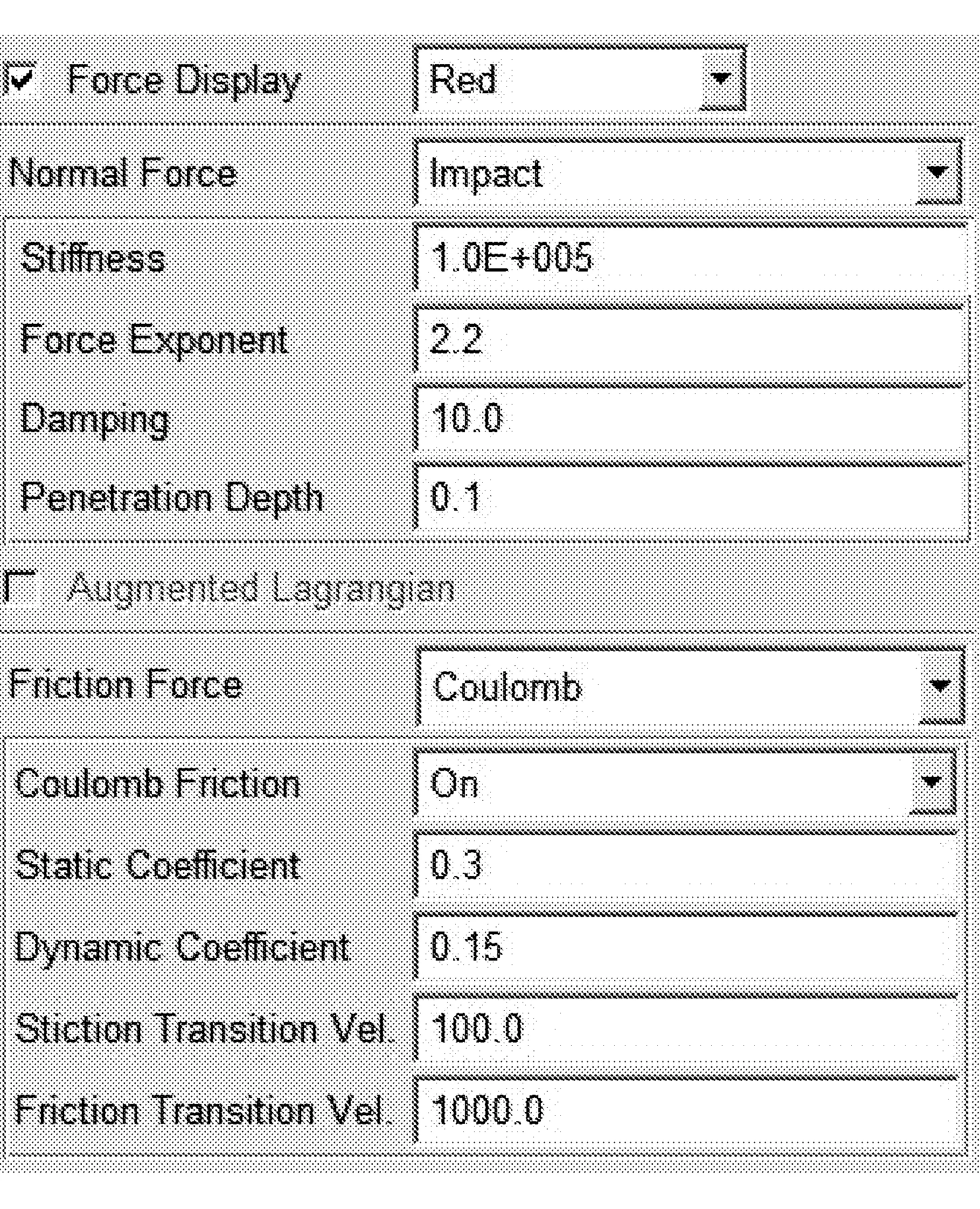
图5 库仑力参数的设置
将以上拨轮和槽轮之间的运动副和运动参数都设置好以后,通过添加力矩命令在槽轮的轴心处加载一个阻力矩,设置该阻力矩的方向为逆时针方向,加载时的方向符合右手法则,加载的这个阻力矩是通过十字转盘两端的重量差计算得来为137 N·m,为了方便查看,将拨轮颜色设置成浅蓝色,槽轮颜色为粉红色,所加阻力矩为红色箭头,如图6所示。

1.槽轮; 2.拨轮
6仿真结果
建立好大转停比槽轮的ADAMS模型后,通过主工具面板在转动副JIONT1处添加一电动机,并设置方向为逆时针转动,设置角速度值为10°/s,通过添加点命令在槽轮与圆柱销的接触表面上建立一MAKER点,最后通过simulation面板设置仿真时间为108 s,步数设定为10 800,圆柱销与槽轮从开始接触到脱离的整个过程如图7~图10所示。
图7 过程1

图8 过程2
图9 过程3
图10 过程4
通过图7可以看到,圆柱销刚与槽轮接触时,由于不是标准槽轮机构,所以两者作用力的方向与槽轮径向槽的中心线成一定的夹角,并且两者作用力的方向和大小会随时发生变化;通过图8可以看到,两者作用力的方向指向了槽轮径向槽的另一侧,由于仿真假设的电动机为逆时针转动,机器翻盘过程中两端重量不同形成了一个顺时针的扭矩,这个扭矩加载在槽轮上,所以在翻盘过程中不是拨轮带动槽轮转动,而是阻止槽轮过快转动,所以两者作用力的方向会指向另一侧;通过图9可以看到,当圆柱销脱离径向槽时,槽轮左侧齿与拨轮外凸圆弧发生碰撞,作用力为两个方向,一个是拨轮外凸圆弧的切线方向,力的数值小,另一个方向与第一个方向垂直,该力的数值大;通过图10可以看到,圆柱销已经完全脱离径向槽,由于槽轮机构的装配和加工问题会在拨轮外凸圆弧和槽轮凹弧接触处留下间隙,所以在圆柱销进入和离开径向槽时都会产生轻微的冲击,并产生一定的持续的振动。
根据仿真效果图来看,仿真过程中圆柱销与槽轮的受力方向和接触位置与理论分析的过程基本吻合,但是由于软件的稳定性和建模精度的影响,所以结果会有一定的误差,将参数设置完好后就通过ADAMS强大的图像后处理模块,得出了运动过程中槽轮的角加速度、角速度、正压力的波动曲线,分别如图11、图12和图13所示。
以上各图都是由ADAMS软件直接得出,通过以上各图显示可以直观地看到槽轮在每个时刻所对应的各参数的变化情况,通过图11可以看到在 36.0 s 时, 即拨销与槽轮开始第2次接触时,槽轮的角加速度发生突变,在 37.0 s时,槽轮的角加速度出现峰值,两者第3次接触的情况与第2次基本相同,通过比较两处峰值,作用过程中角加速度最大值为 2.3°/s;通过图12可以看到槽轮的角速度变化情况,36.0 s,拨销与槽轮开始接触,37.5 s时第3周期与第2周期基本相同,得出两者作用过程中最大角速度值为 14.2°/s;图13显示了在槽轮机构传动过程中,拨销对径向槽的正压力的变化,通过对比后两个周期的峰值可知,37.5 s时拨销对槽轮的正压力出现峰值,数值为 4 830 N。将模拟仿真的数据与计算的理论数据进行对比后得知,理论计算的槽轮的角加速度和角速度分别为 2.74°/s和 16.7°/s,均大于模拟仿真的数据,通过分析可知,理论计算没有考虑拨轮和径向槽之间的摩擦因素,在 ADAMS 仿真中建立了其接触的库仑力模型,使分析的结果更接近于实际;对比正压力的数值可知,理论计算的正压力 5 120 N 大于仿真得到的正压力4 830 N,通过分析可知,理论计算中将系统等效在槽轮上的惯性力ML值估计的太大,导致了理论值偏大。

图11 角加速度

图12 角速度

图13 正压力
7结语
针对安瓿针剂自动上料机中主要的执行元件----槽轮机构进行分析,通过落料的时间和针剂盒翻转所用的时间来确定该槽轮机构的运动系数,设计出该机构的结构尺寸并在三维软件中建模,通过ADAMS软件来模拟其运动过程,将运动过程图与理论运动对比,运动中受力情况基本一致,最后通过仿真得出了相关参数量的数据,并对数据进行了分析。提出的具有大转停比的槽轮机构设计方法为以后对槽轮机构的优化提供了参考依据。
参考文献:
[1]张磊,詹磊.一种新型槽轮机构的设计与研究[J].机械传动,2007,31(6):36-39.
[2]刘辰.外槽轮机构设计分析[J].机电工程技术,2009,38(2):61-63.
[3]杨兴海.凸轮-槽轮组合机构及其设[J].三峡大学学报:自然科学版,2000,22(1):66-68.
[4]程熊豪.槽轮机构创新设计及应用研究[J].企业技术开发月刊,2015(2):11-13.
[5]张越今,宋健,张云清.多体系统动力学分析的两大软件ADAMS和DADS[J].汽车技术,1997,13(3):16-20.
[6]张越今,宋健.多体动力学仿真软件ADAMS理论及应用研讨[J].机械科学与技术,1997,16(5):753-758.
[7]张爱莲,陈书剑.ADAMS柔性体建模技术研究[J].煤矿机械,2011(6):95-97.
[8]方子舟,舒刚.齿轮传动多体接触动力学模型[J].机械传动,2009,33(1):15-18.
[9]埃伯哈德.现代接触动力学[M].南京:东南大学出版社,2003.
ADAMS based simulation on geneva mechanism dynamics
SONG Guoya1,WANG Hui1*,ZHAO Junpeng1,CHANG Xiaopeng2
(1.School of Mechatronic Engineering, Changchun University of Technology, Changchun 130012, China;2.School of Soft Technology, Changchun University of Technology, Changchun 130012, China)
Abstract:First the mechanism dynamics of the common geneva is analyzed with theory and simulation, and then 3D model of geneva mechanism with big turn/stop is built to study the mechanism characteristics. ADAMS is applied to analyze the stress and motion.
Key words:geneva mechanism; ratio between turn and stop; ADAMS simulation calculating.
中图分类号:TH 112
文献标志码:A
文章编号:1674-1374(2016)01-0083-07
DOI:10.15923/j.cnki.cn22-1382/t.2016.1.17
作者简介:宋国亚(1989-),男,汉族,河南鹿邑人,长春工业大学硕士研究生,主要从事机电一体化综合技术方向研究,E-mail:812197296@qq.com. *通讯作者:王晖(1970-),女,汉族,吉林长春人,长春工业大学副教授,主要从事机电一体化综合技术方向研究,E-mail:wanghui@ccut.edu.cn.
收稿日期:2015-12-10
