基于SURF特征匹配的电气化铁路接触网支撑装置旋转双耳不良状态检测
2016-05-07杨红梅刘志刚
杨红梅,刘志刚
(1.西安铁路职业技术学院 电气工程系,陕西 西安 710014;2.西南交通大学 电气工程学院,四川 成都 610031)
作为铁路接触网支撑装置的重要承力设备,旋转双耳的状态好坏关系着支撑结构的稳定性。为增加接触网支撑结构可靠性,提高弓网系统受流质量以保证行车安全,有必要实时监测其状态,为维护工作提供有效参考。
我国目前主要采用人工方法对接触网支撑结构进行检查,其效率和可靠性都难以达到要求,因此有必要进行智能化、实时化检测方法的研究。铁路的实时智能化研究主要有受电弓滑板磨耗、裂纹检测以及接触网参数的非接触式检测等。文献[1]利用边缘识别、聚类和霍夫变换等,通过初识别和精确定位完成了受电弓图像目标区域的定位和提取。文献[2]应用光学图像处理和二次样条小波定位滑板边缘,进而实现滑板厚度的测量。文献[3]利用起点定位检测滑板边缘,并结合不同边缘算子获取磨耗处的信息,从而检测滑板磨耗程度。文献[4]通过CCDP算法得到滑板的曲波系数矩阵,从矩阵信息中识别滑板固有特征和裂纹特征。文献[5]利用曲波矩阵移动平行窗口能量值的不同信息识别接缝、噪声和螺钉等固有特征,以获取裂纹特征信息。文献[6]通过图像检测设备非接触式检测弓网参数。文献[7]研究了二维激光雷达对视距内障碍物的识别、跟踪,以达到接触网几何参数非接触式检测的目的。文献[8]利用链码获取目标的大致角度,结合Radon方法检测了支架定位器的定位坡度。对于接触网悬挂装置图像而言,由于其全局信息较复杂,国内外关于应用图像处理的非接触式检测方法的研究较少,本文对基于图像处理的悬挂装置状态检测进行了初步研究。
在图像匹配识别中,特征点的检测算法主要有Forstner[9]、Harris[10]、Moravec[11]、尺度不变特征变换SIFT[12]等。SURF[13]和SIFT都具有局部特征尺度、旋转不变性,文献[14]比较了两种算法的性能,表明SURF算法的速度更具优势。
本文在基于图像处理的接触网支撑装置状态检测研究基础上[15-16],以接触网支撑装置的全局图像为检测对象,利用SURF算法初识别并提取旋转双耳装置;利用Hough圆、矩形识别方法精确定位耳片局部图像;根据耳片局部图像灰度方差的分布规律判别双耳的具体状态。
1 SURF理论
Herbert提出的SURF算法,是检测图像局部不变特征的一种新算法。此算法具有良好的局部特征不变性,其主要步骤如下。
1.1 特征点检测
设积分图像中的一点P(x,y),则点P和原图像中原点所形成的矩形面积中所有像素值的和用点P的I∑(P)表示,即
( 1 )
式中:I(i,j)为点i、j的像素值(原图像中);I∑(P)为点(x,y)的积分图像。
设由A、B、C及D组成的一个矩形区域,则该矩形内所有灰度的和可由式( 2 )进行计算。
S=A-B-C+D
( 2 )
特征点具体位置需根据Hessian矩阵行列式的局部最大值进行检测。设图像I中一点X=(x,y),该点σ尺度上的Hessian矩阵为
( 3 )
式中:Lxx(X,σ)为X处高斯二阶偏导与图像I的卷积;Lxy(X,σ)、Lyy(X,σ)含义相似。
通过Dxx、Dyy、Dxy表示实际图像与模板图像的卷积,重新代入式( 3 ),得到Hessian矩阵的行列式为
det=DxxDyy-(wDxy)2
( 4 )
式中:w为权重系数,实际应用中多使用其固定值0.9。依据式( 4 )计算所有点的响应求得尺度σ响应图。
1.2 特征点描述
设一圆形区域,半径为6s(s是特征点所在的尺度),中心为特征点,计算圆形内各点的Haar响应dx、dy,方向沿x、y。求取响应所对应的直方图。为得到新的矢量,圆形区域中的Haar响应需被沿x轴方向进行累加(60°范围内)。遍历圆形区域,每隔5°计算新矢量,共得到新矢量72个。主方向为最长矢量方向。特征提取区域为20s的矩形区域。将该区域分成4×4的子区域。在子区域中累加dx、dy、|dx|、|dy|,求得特征V。
V=(∑dx,∑dy,∑|dx|,∑|dy|)
( 5 )
2 基于SURF的旋转双耳初识别
由于接触网全局图像背景太过复杂,而检测目的为识别其中旋转双耳部分的状态,基于此,有必要在检测前先从全局图像中识别定位双耳装置。由于不同图像中旋转双耳存在尺寸和角度不同的问题,目标匹配很容易因特征变化而失效,而SURF局部不变特征匹配方法能较好保持特征的尺度和旋转不变性,因此本文利用SURF方法识别定位全局图中的旋转双耳。

( 6 )
式中:n为特征值维数;Xjk为双耳模板图像中第j个特征所对应的第k个值;Xik为待检测图像中第i个特征所对应的第k个值。
用上述步骤使图1和图2(a)的特征点进行匹配,图2(b)为匹配结果。除了正确匹配区域外还有少量误匹配点存在于初始匹配中。为快速有效地消除各种原因引起的误匹配点,使旋转双耳耳片的定位与识别更加准确可靠,提出以下消除误匹配方法:
(1)特征点聚类。为达到快速去除零散误匹配点的目的,待检测图像中的所有特征点将被聚类,聚类依据为各特征点间的距离。
(2)特征点比值。统计旋转双耳模板图像特征点总数N和各聚类中已配对的点数Ni。当Ni不小于N的0.6倍时(通过实验表明,取0.6倍消除误匹配的效果较好),则该聚类匹配成功,否则为误匹配。最终根据匹配点的具体坐标信息实现旋转双耳的初定位。

图1 旋转双耳模板图
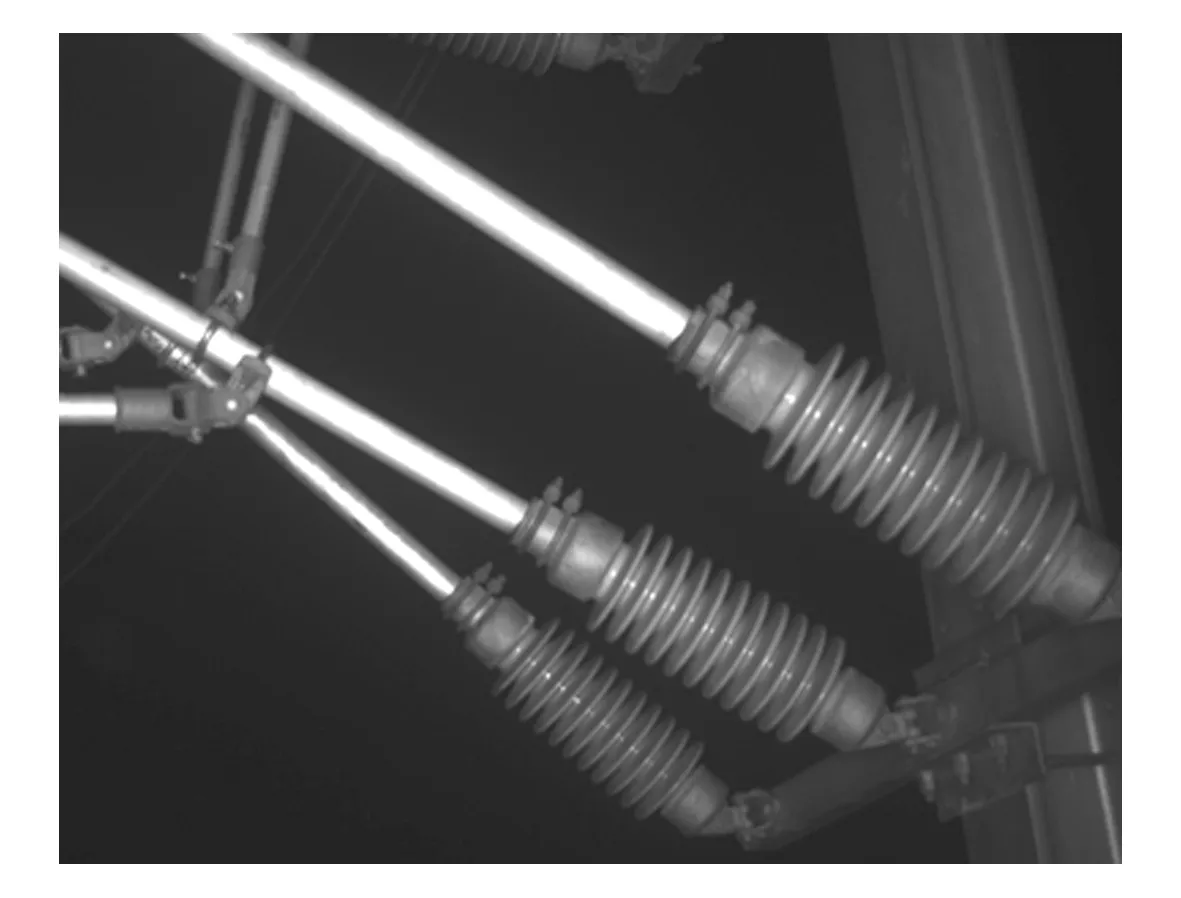
(a)待检测全局图像
(b)SURF特征初匹配效果图
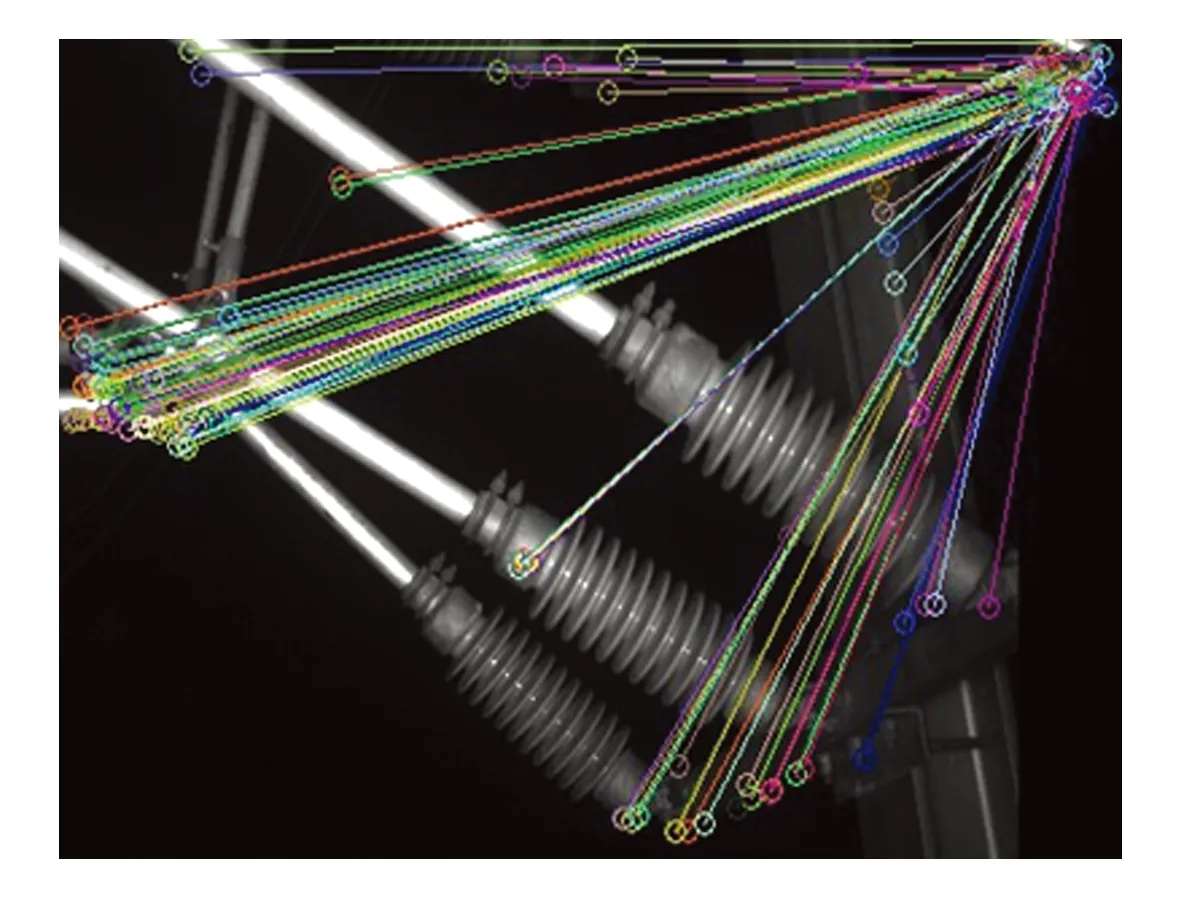
(c)误匹配消除效果图图2 旋转双耳特征匹配效果图
旋转双耳匹配阈值设置为
( 7 )
从图2(c)可以看出,以上误匹配消除方法可在有效去除误匹配点的前提下尽可能多地保留匹配点。
3 基于Hough变换的耳片精确定位
在旋转双耳局部图像从待检测全局图像中成功提取后,需在此图像中精确定位耳片。从图3椭圆区域可以看出,旋转双耳在耳片中间一定范围内出现断开、裂纹等不良状态。局部图像中固有的形状特征(如螺钉、螺栓等)将会严重影响双耳可能存在的断裂特征的识别。故在检测前识别耳片固有特征以提高状态检测判据的通用性、准确性。
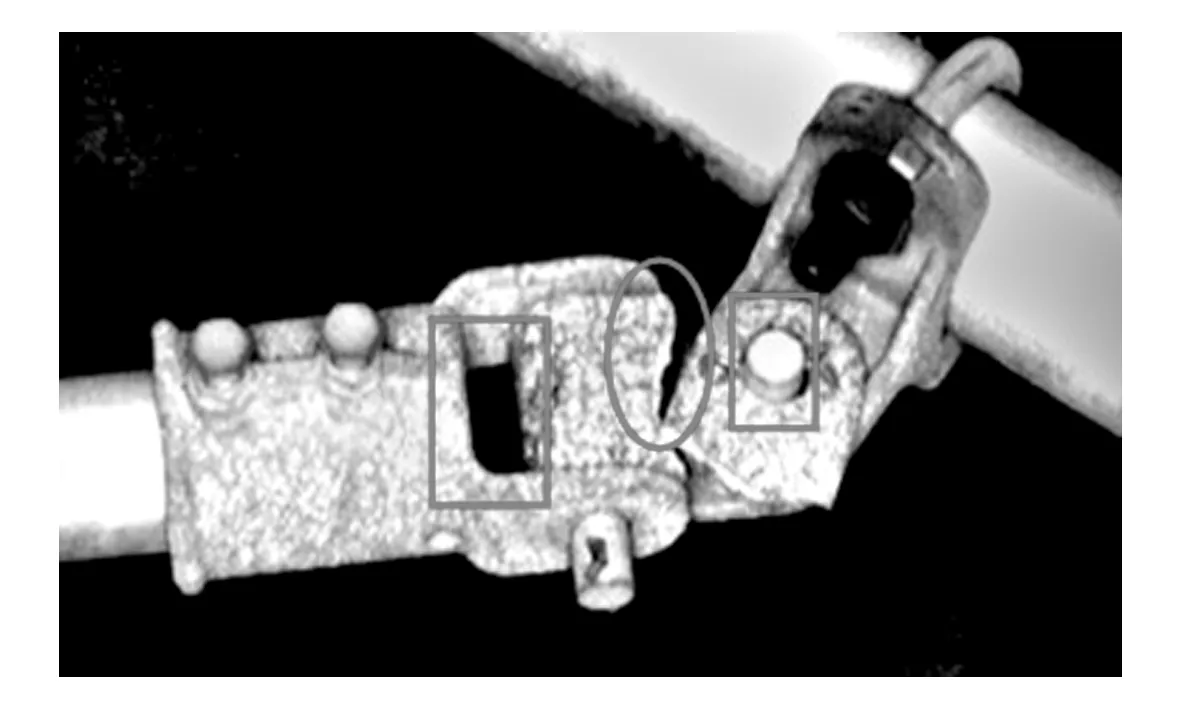
(a)耳片断开
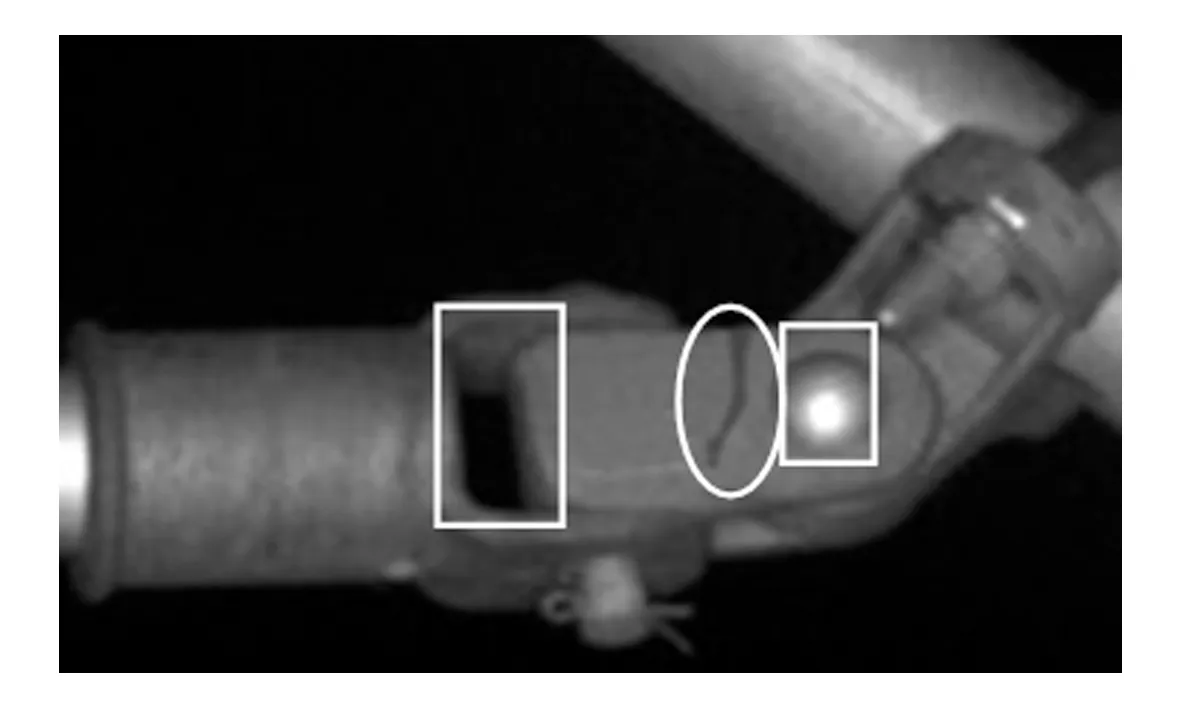
(b)耳片裂纹图3 双耳断裂局部图像
图3中左侧矩形框内所示的形状,可等效为矩形特征,而右侧矩形框中的形状则可等效为圆形特征。对其进行Hough变换圆、矩形检测,可获取中心、半径等信息,即可定位固有特征,从而消除其对耳片检测的干扰,同时进一步缩小断裂特征的检测范围。
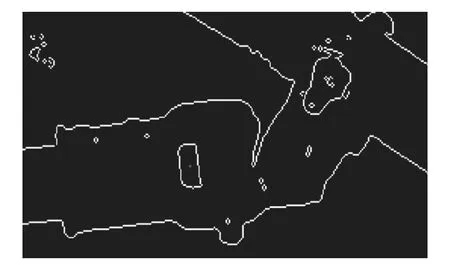
3.1 基于Hough变换圆检测的螺钉识别定位
设一条闭合轮廓线,Hough变换圆检测首先扫描整个轮廓。为快速识别其是否为圆,扫描的方向为垂直、水平两个方向。通过扫描结果的Hough变换获取两条直径Lv和Lh,圆心(xc,yc)即为两直径的交点。圆半径根据轮廓线的像素坐标估计得到。
r=max((xmax-xmin)/2,(ymax-ymin)/2)
( 8 )
式中:xmax、ymax分别为闭合轮廓最大x、y坐标;xmin、ymin分别为闭合轮廓最小x、y坐标。
为获得耳片局部图像螺钉的半径、圆心,用螺钉半径范围设置半径参数。图4(a)、图4(b)分别为图3(a)、图3(b)的螺钉检测结果。

(a)耳片断开圆检测能量图
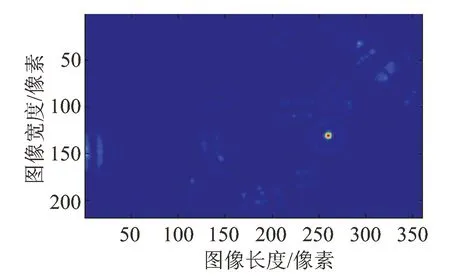
(b)耳片裂纹圆检测能量图图4 Hough变换螺钉定位效果图
3.2 基于Hough变换的矩形识别定位
对于Hough矩形检测,首先利用Hough变换对矩形轮廓曲线进行投票,得到H1=(P1,θ1)、H2=(P2,θ2)、H3=(P3,θ3)、H4=(P4,θ4)4个峰值,4个峰值分别对应P1P2、P2P3、P3P4和P4P14条边。如果两个峰值点的角度θi一致,则其对应为一组对边,如果两组对边同时满足垂直关系,即可判断其为矩形。
图5(a)、图5(b)分别为图3(a)、图3(b)矩形检测结果。矩形中心如图中红色十字所示,同时还可以得到长宽信息。
(a)耳片断开矩形定位图
(b)耳片裂纹矩形定位图图5 Hough变换矩形定位效果图
3.3 耳片局部图像提取
根据上述方法得到的中心、长宽、半径信息,可进一步获得断裂特征出现的耳片区域范围。由于存在螺钉数量不一致的旋转双耳,此时可由圆心间的距离定位所需螺钉。为了在排除固有特征干扰的前提下,使得图像信息尽可能的多保留,选取横坐标始于矩形边缘向螺钉侧平移5个像素处,止于靠近矩形侧的螺钉边缘,纵坐标取矩形上下边缘再分别向外平移5个像素。局部图像顶点坐标为
( 9 )
(10)
(11)
(12)
式中:o1、o2分别为矩形、螺钉中心;a、b分别为矩形的宽和长;r为螺钉半径。基于上述信息,提取图3的耳片局部图像,如图6所示。
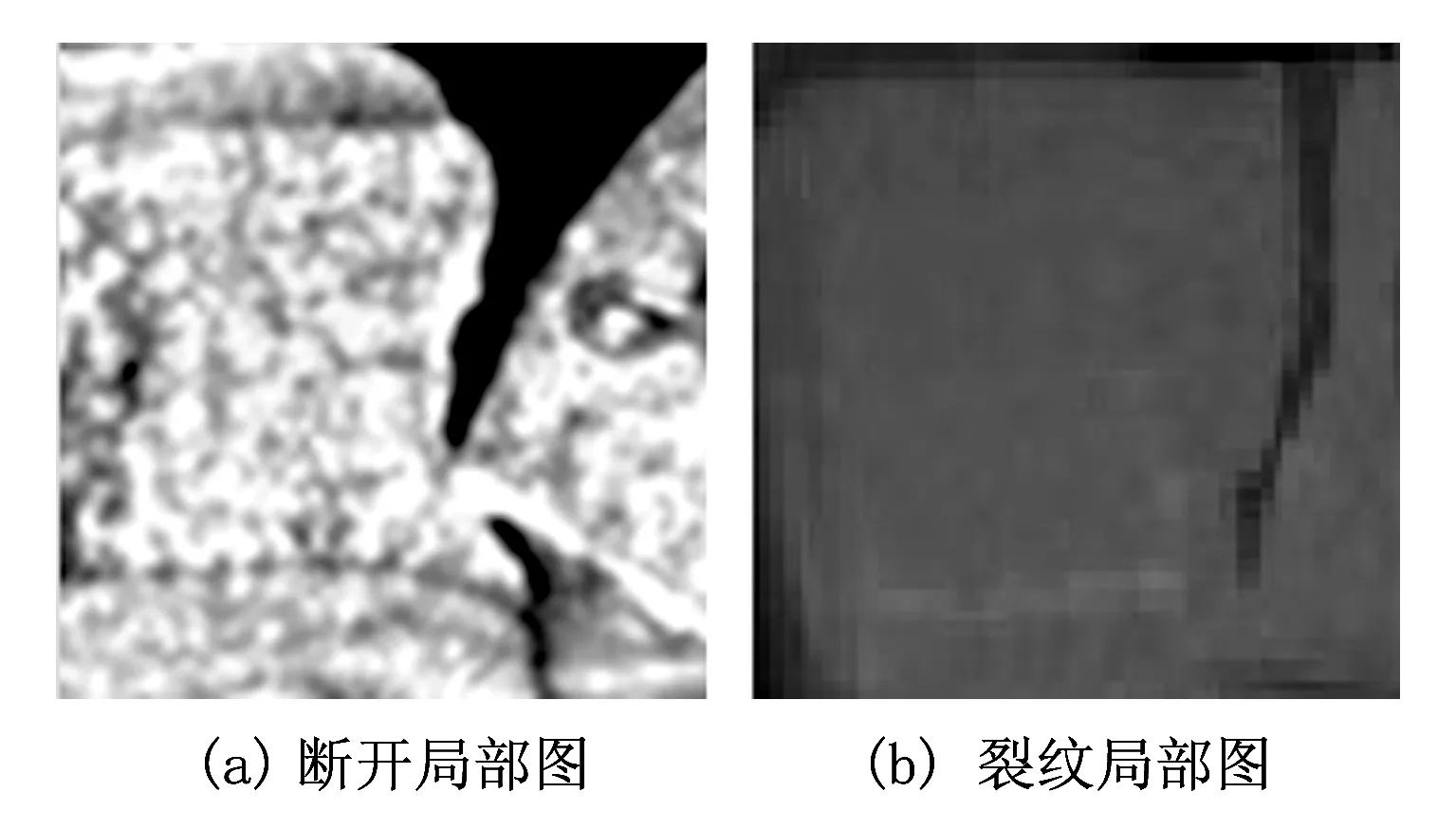
图6 耳片局部图像
4 旋转双耳状态识别
在完成耳片精确定位后,即可进行状态检测。一般情况下,耳片的灰度大小不会发生明显突变。当耳片有断开、裂纹时,断开、裂纹的边缘处灰度将发生较大变化,表现为具有一定方向的线性边缘特征。由于灰度分布不均而导致该处的灰度方差分布范围发生较大波动,故设置相应的灰度方差阈值作为判据,以识别双耳的不良状态特征。步骤如下:
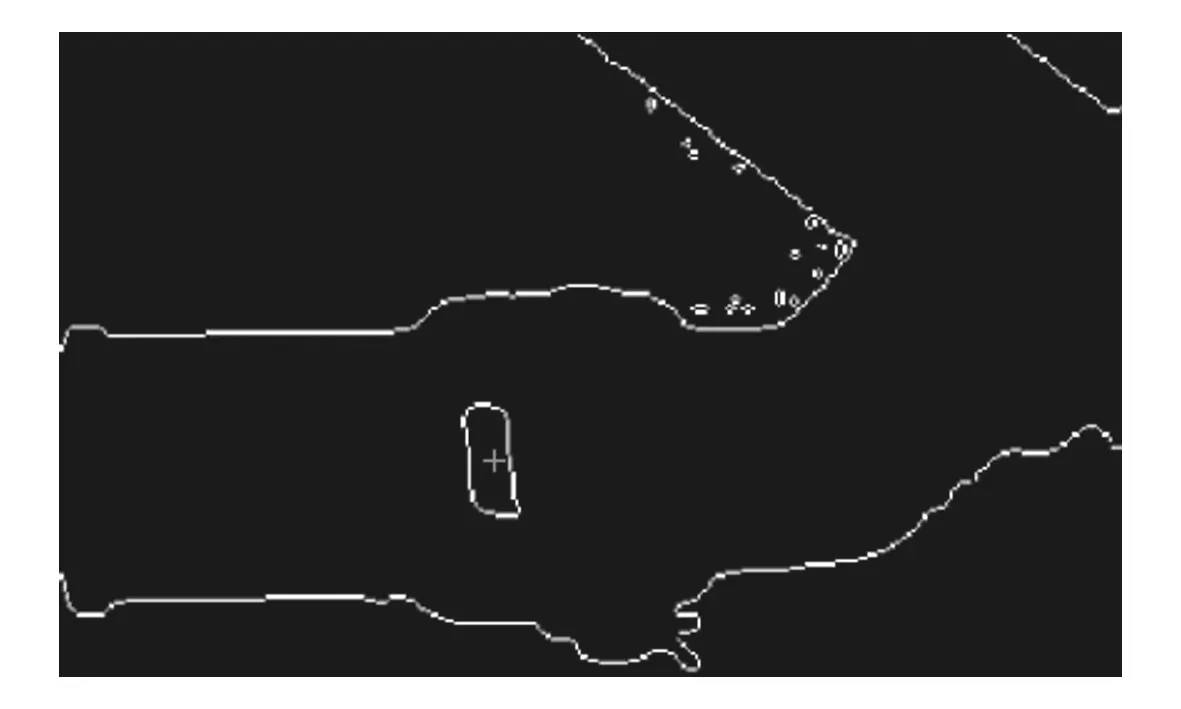
(1)基线。在耳片的局部图像中,从上到下每隔10个像素取一条基线。
(2)灰度方差。计算各基线上的灰度方差,方差计算单位为同一基线上的相邻5个像素。考虑到断开区域可能独立形成一个方差计算单位而错过断开边缘的方差突变(如图7中矩形框所示),具体计算中,每一个方差计算单位由上一单位中的后两个像素加上相邻的三个新像素组成新的方差计算单位。
(3)判据。正常耳片的灰度分布较均匀,且值普遍较小,故其灰度方差分布在较小范围内。在断开、裂纹处,灰度值的变化使得其灰度方差明显超出其平均分布范围。故设置判据如下:如果局部图像中两条及两条以上的基线上存在灰度方差F不小于阈值3Fm(Fm为一组灰度方差的均值,通过实验,阈值3Fm能有效判别断裂特征所导致的灰度方差变化)的情况,则判断该耳片出现断裂特征。
(13)
4.1 旋转双耳断开状态检测
运用上述检测步骤(1)~(3)对严重断开的耳片局部图像进行检测,效果如图7、图8所示。

图7 基线定位效果图
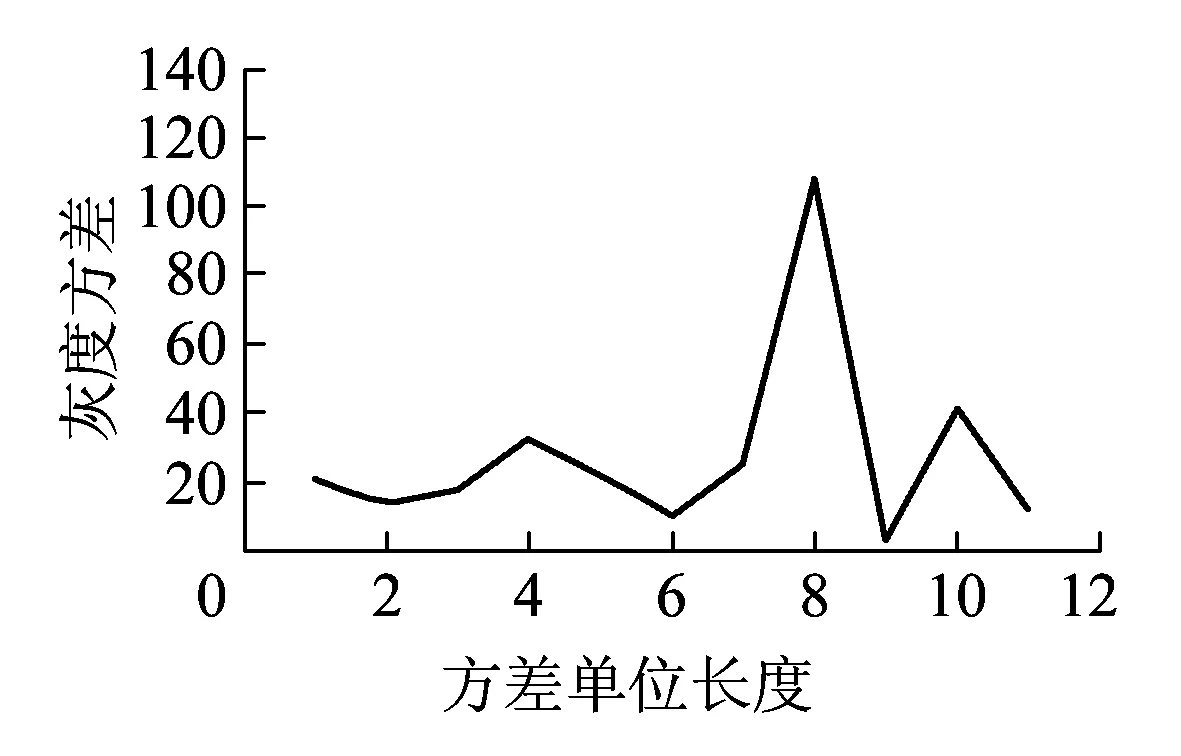
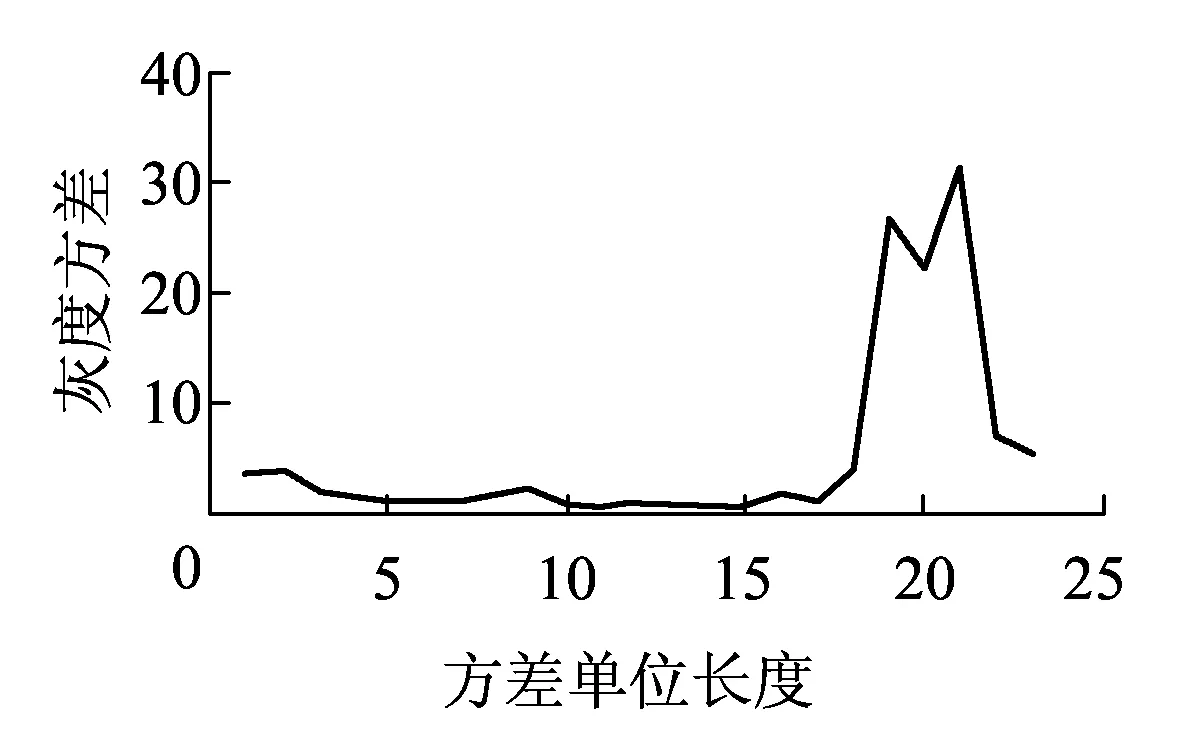
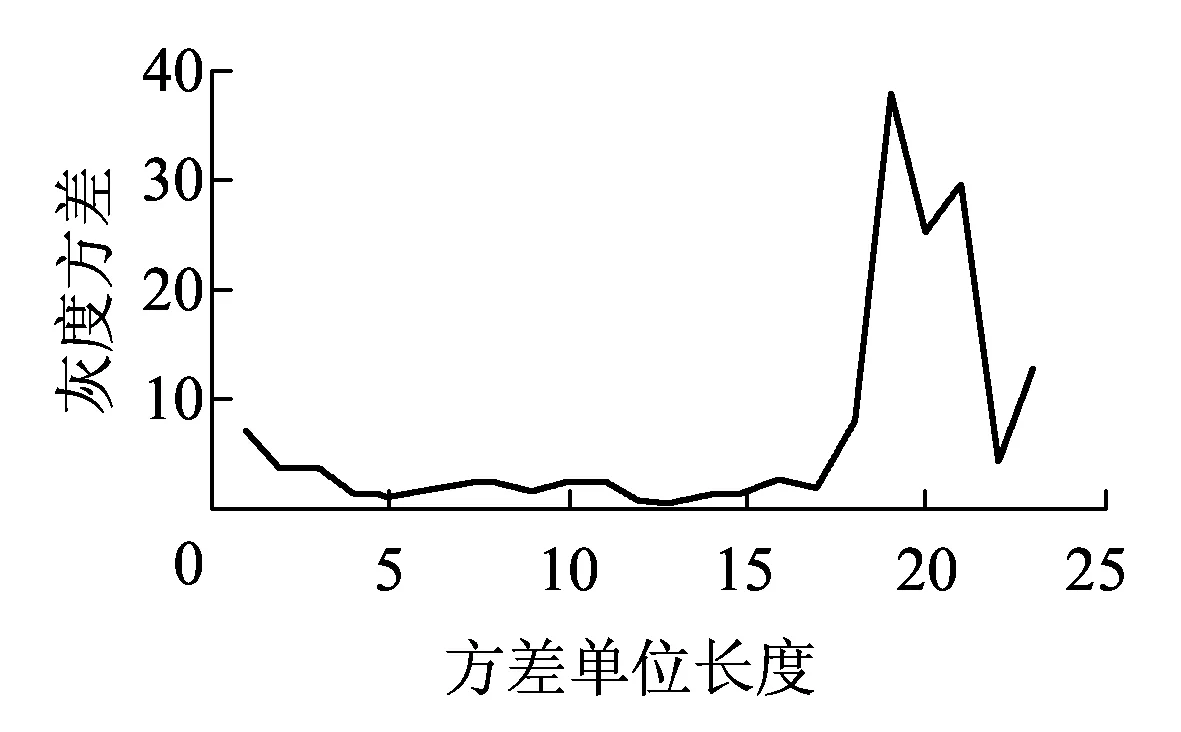
(a)第一条基线处的灰度方差
(b)第二条基线处的灰度方差
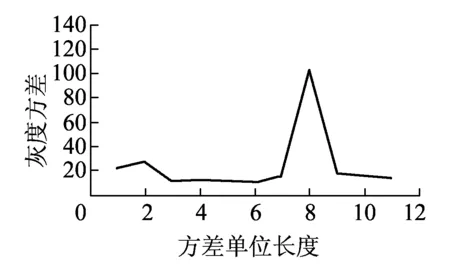
(c)第三条基线处的灰度方差
(d)第四条基线处的灰度方差

(e)第五条基线处的灰度方差

(f)第六条基线处的灰度方差图8 不同基线处的灰度方差
其中,图8(a)~图8(e)的基线处灰度方差发生明显变化,且符合断裂特征判据式(13),即判断该旋转双耳为断裂状态。
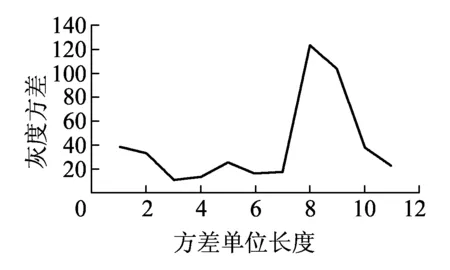
4.2 旋转双耳裂纹状态识别过程
运用上述方法检测裂纹耳片,效果如图9、图10所示。
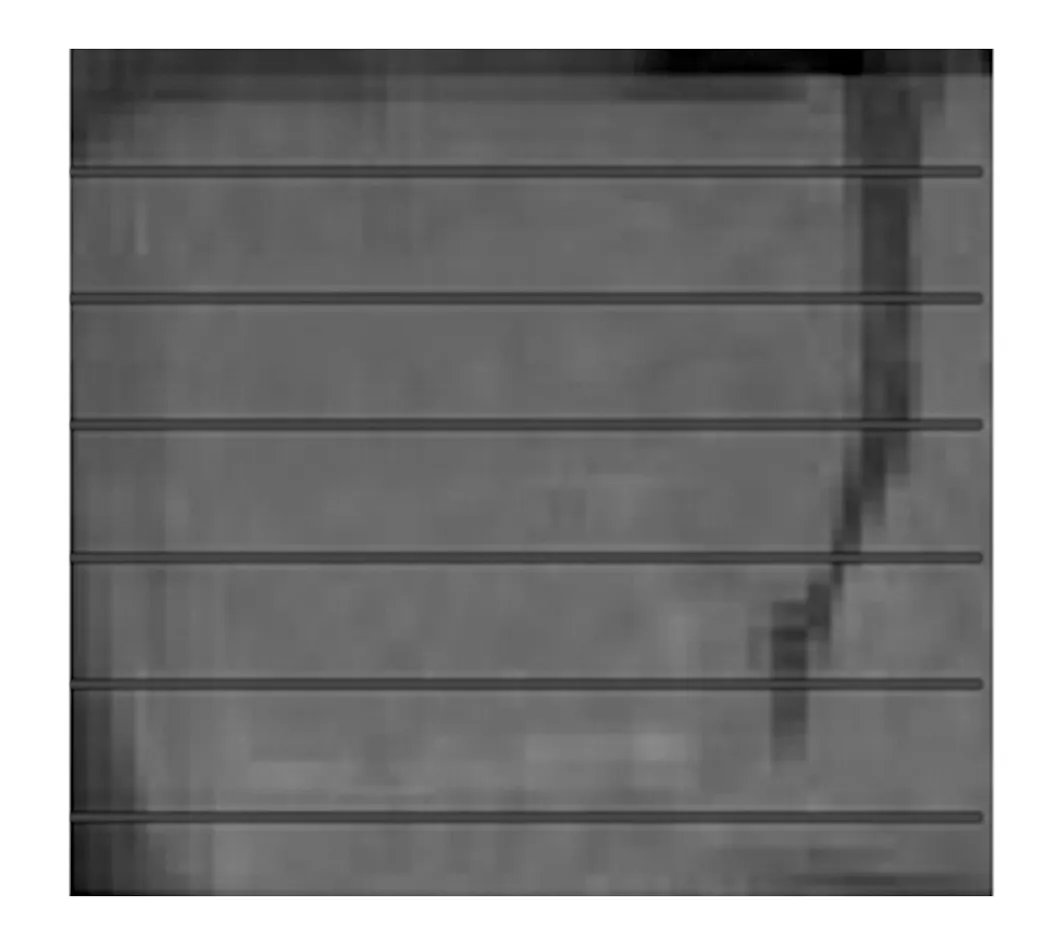
图9 基线定位效果图
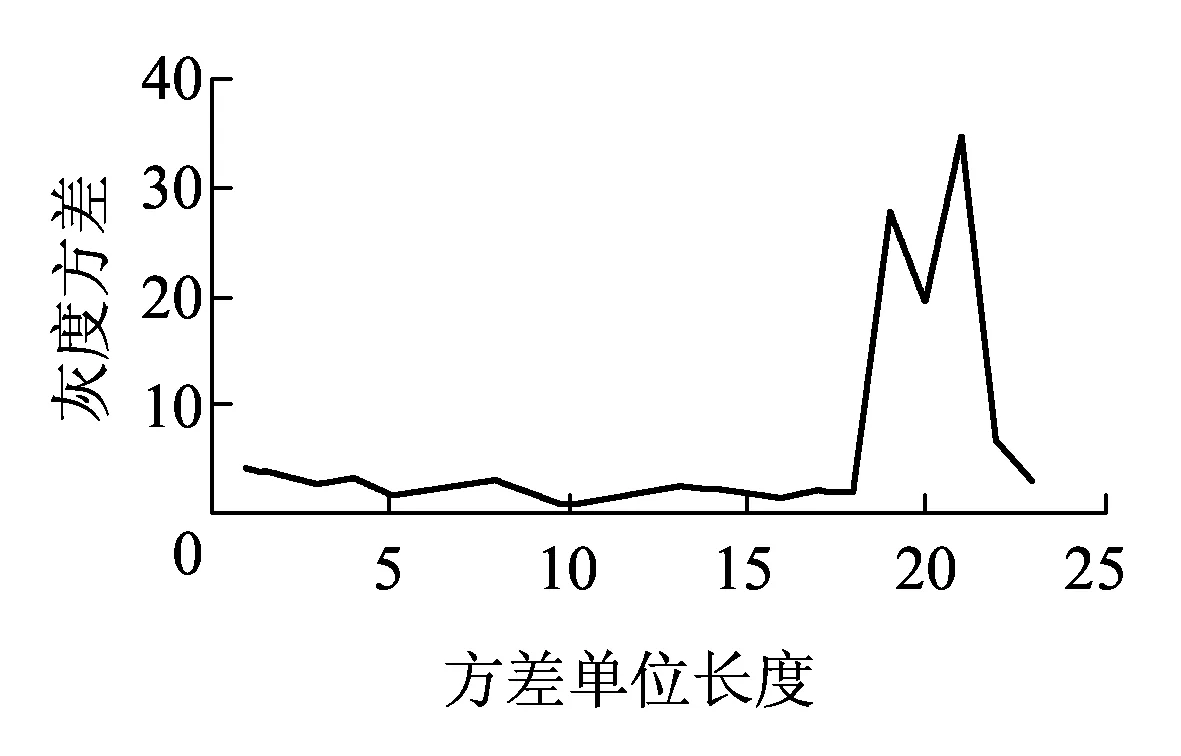
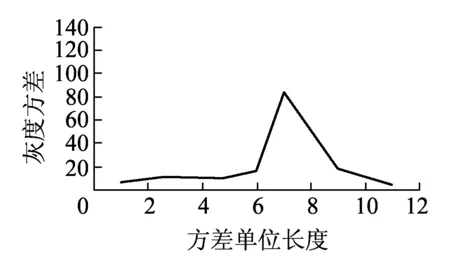
(a)第一条基线处的灰度方差
(b)第二条基线处的灰度方差
(c)第三条基线处的灰度方差
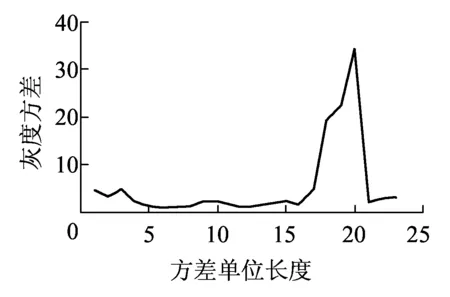
(d)第四条基线处的灰度方差
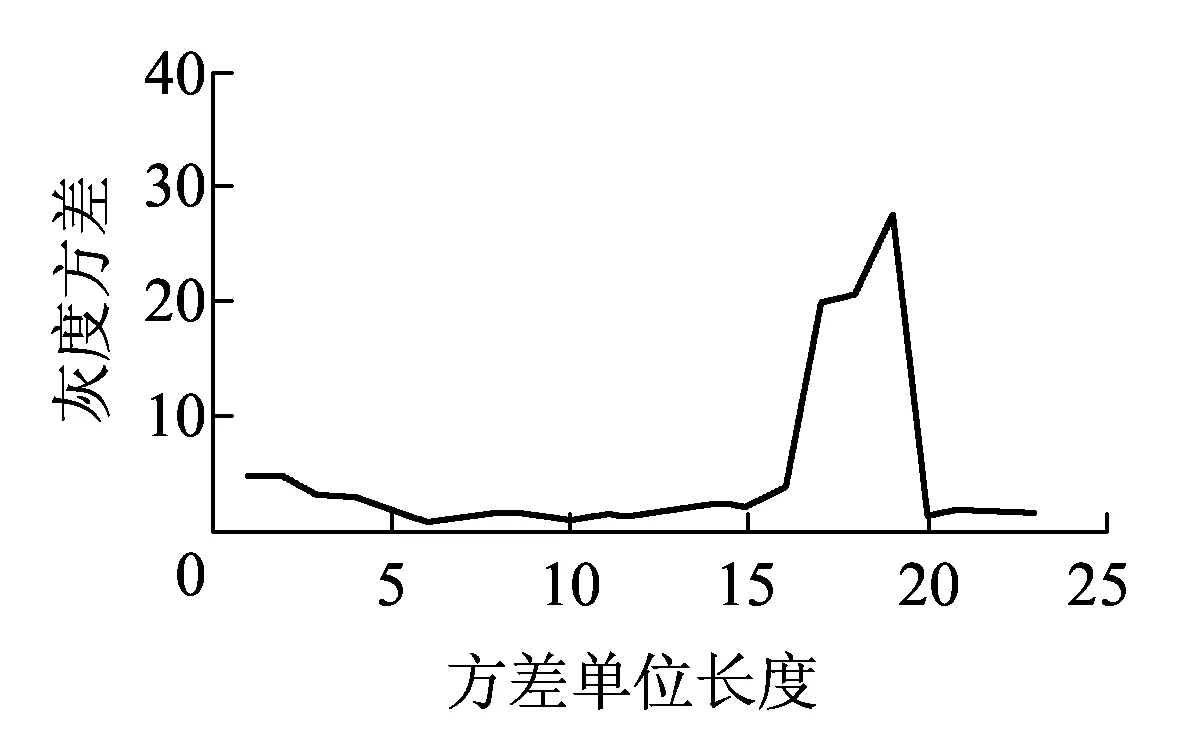
(e)第五条基线处的灰度方差
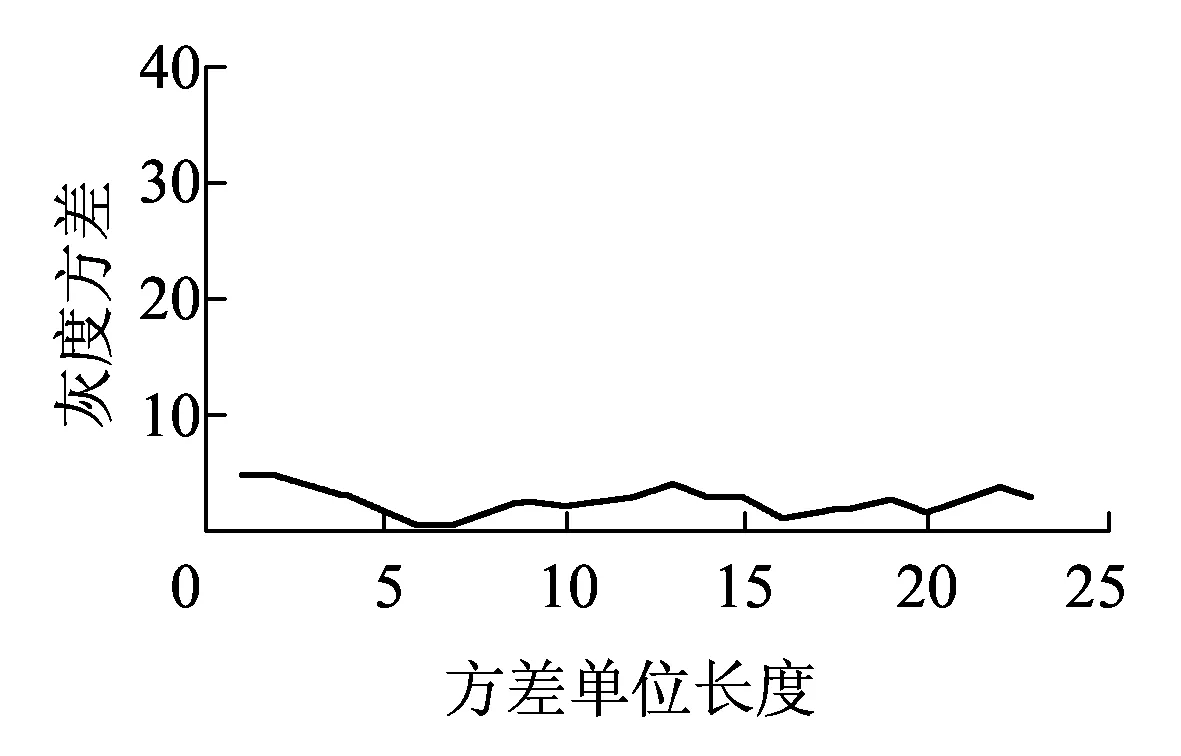
(f)第六条基线处的灰度方差图10 不同基线处的灰度方差
其中,图10(a)~图10(e)中的基线处方差均有明显变化,且符合断裂特征判据式(13),因此得出此旋转双耳的状态为断裂。
表1为用本文方法对综合列检车获取的实际图像进行检测的实验结果。其中误检主要是由于存在旋转双耳被遮挡的情况,若遮挡面积过大,将导致最终检测到的特征数量低于阈值而漏检,可调节拍摄角度以改善该问题。
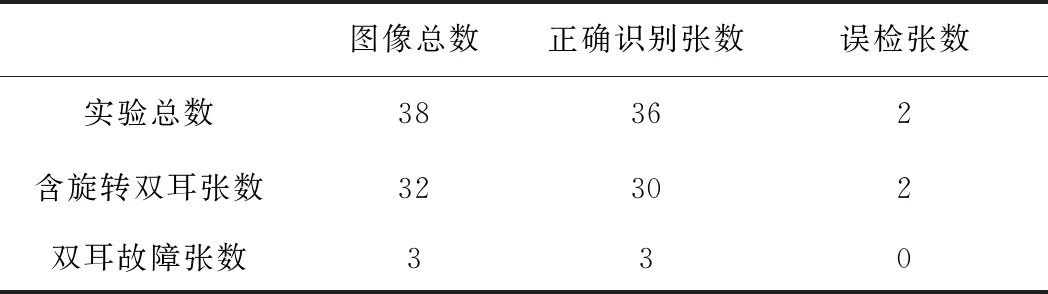
表1 旋转双耳检测实验统计结果
5 结论
为实现接触网支撑装置中旋转双耳状态自动检测的目的,本文利用SURF特征匹配方法,较准确地识别并提取旋转双耳目标图像。精确定位耳片局部图像,进一步降低断裂特征识别难度。最终通过局部图像基线的灰度方差分布规律较准确地识别耳片断裂特征。
(1)SURF匹配方法的局部特征在旋转、角度和尺度变换下均可保持良好不变性,而实际接触网支撑装置图像的特征多变、目标匹配困难等问题可因此得到改善。
(2)状态检测对象为耳片局部图像,大大提高了耳片不良状态特征的可识别性。以局部图像灰度方差为判据,对于严重断开或细小裂纹均可识别,具有较好稳定性和通用性。
参考文献:
[1]陈维荣,冯倩,张健,等.受电弓滑板状态监测的图像目标提取[J].西南交通大学学报,2010,45(1):59-64.
CHEN Weirong,FENG Qian,ZHANG Jian,et al.Image Object Detection in Monitoring of Pantograph Slippers[J].Journal of Southwest Jiaotong University,2010,45(1):59-64.
[2]马莉,王泽勇,高晓蓉,等.图像处理技术在受电弓滑板检测中的应用[J].机车电传动,2009(5):52-53.
MA Li,WANG Zeyong,GAO Xiaorong,et al.Application of Image Processing in Detecting the Pantograph Sliding[J].Electric Drive for Locomotives,2009(5):52-53.
[3]冯倩,陈维荣,王云龙,等.受电弓滑板磨耗测量算法的研究[J].铁道学报,2010,32(1):109-113.
FENG Qian,CHEN Weirong,WANG Yunlong,et al.Research on the Algorithm to Measure the Pantographic Slipper Abrasion[J].Journal of the China Railway Society,2010,32(1):109-113.
[4]韩志伟,刘志刚,陈坤峰,等.基于二代曲波系数定向映射的受电弓滑板裂纹检测技术[J].铁道学报,2011,33(11):63-69.
HAN Zhiwei,LIU Zhigang,CHEN Kunfeng,et al.Pantograph Slide Cracks Detection Technology Based on Curvelet Coefficients Directional Projection[J].Journal of the China Railway Society,2011,33(11):63-69.
[5]陈坤峰,刘志刚,韩志伟,等.基于曲波域移动平行窗的受电弓滑板裂纹识别[J].铁道学报,2012,34(10):43-47.
CHEN Kunfeng,LIU Zhigang,HAN Zhiwei,et al.Pantograph Slipper Cracks Identification Based on Translational Parallel Window in Curvelet Transform Domain[J].Journal of the China Railway Society,2012,34(10):43-47.
[6]NIWAKAWA M,ONDA T,KINOSHITA N.Stereo Vision Based Measurement of Intersections of Overhead Contact Wires and Pantograph of Kyushushinkansen[J].IEEJ Transactions on Industry Applications,2007,127(2):118-123.
[7]牛大鹏.非接触式接触网几何参数检测系统研究[D].成都:西南交通大学,2008.
[8]范虎伟,卞春华,朱挺,等.非接触式接触网定位器坡度自动检测技术[J].计算机应用,2010,30(S2):102-103.
FAN Huwei,BIAN Chunhua,ZHU Ting,et al.Automatic Detection of Positioning Line in Contactless Overhead Contact System[J].Journal of Computer Applications,2010,30(S2):102-103.
[9]FRSTNER W.A Fast Operator for Detection and Precise Location of Distinct Points,Corners and Centers of Circular Features[C]//Proceedings of the ISPRS Inter Commission Workshop,1987:149-155.
[10]HARRIS C J,STEPHENS M.A Combined Corner and Edge Detector[C]//Proceedings of the 4th Alive Vision Conference,1988:147-151.
[11]MORAVEC H.Rover Visual Obstacle Avoidance[C]//Proceedings of the 7th International Joint Conference on Artificial Intelligence,1981:785-790.
[12]David G Lowe.Distinctive Image Features from Scale-invariant Key Points[J].International Journal of Computer Vision,2004,60(2):91-110.
[13]BAY H,TUYTEPLAARS T,GOOL L V.SURF:Speeded up Robust Features[J].Computer Vision & Image Understanding,2006,110(3):404-417.
[14]JUAN L,GWUN O.A Comparison of SIFT,PCA-SIFT and SURF[J].International Journal of Image Processing,2009,3(4):143-152.
[15]杨红梅,刘志刚,韩志伟,等.基于仿射不变矩的电气化铁路绝缘子片间夹杂异物检测[J].铁道学报,2013,35(4):30-36.
YANG Hongmei,LIU Zhigang,HAN Zhiwei,et al.Foreign Body Detection between Insulator Pieces in Electrified Railway Based on Affine Moment Invariant[J].Journal of the China Railway Society,2013,35(4):30-36.
[16]杨红梅,刘志刚,韩烨,等.基于快速鲁棒性特征匹配的电气化铁路绝缘子不良状态检测[J].电网技术,2013,37(8):2 297-2 302.
YANG Hongmei,LIU Zhigang,HAN Ye,et al.Defective Condition Detection of Insulators in Electrified Railway Based on Feature Matching of Speeded-up Robust Features[J].Power System Technology,2013,37(8):2 297-2 302.