车载LiDAR用于轨道线带状图测量的高程精度分析
2016-05-06韩尚
韩 尚
(福建省测绘院,福建 福州 350003)
车载LiDAR用于轨道线带状图测量的高程精度分析
韩尚
(福建省测绘院,福建 福州 350003)
Height Accuracy Analysis of Rail Line Strip Map Based on Vehicle LiDAR System
HAN Shang
摘要:目前,轨道交通建设在各大中城市日益兴起,传统的测量技术手段难以快速获取城市轨道交通带状图,而车载LiDAR作为一种新的测量技术,能够实现快速、全面地获取道路两侧的详细地物信息,并且在高程测量上能够达到较高的精度。本文以SSW移动测量系统为硬件平台,采用多种作业方案对郑州市地铁轨道交通线进行带状图测量,针对各方案的高程测量数据,分析GPS信号强度、检校点密度、采集方式对点云高程精度的影响。试验结果表明,采用往返扫描的作业方式,可有效地减小系统误差,提供测量精度;当GPS信号较弱时,采用往返扫描的作业方式,并适当增加检校点密度,也能达到轨道交通带状图高程精度要求。
关键词:精度分析;高程测量;车载LiDAR;轨道线带状图;激光点云
轨道线带状地形图是地铁建设的重要基础资料,它根据地铁线路建设的需求将地物、地貌予以详细的表达,相对于平面精度而言,高程精度比其他地形图要求更为严格,传统的高程测量费时费力,且不容易达到精度要求。随着我国大中型城市轨道交通建设快速推进,如何快速、高精度地获取轨道线带状图成为测绘工作者迫切需要解决的技术难题。随着三维激光扫描技术的不断发展,车载LiDAR的逐渐成熟及精度的不断提高,利用车载LiDAR解决轨道线带状地形图高程测量成为可能[1-5]。研究移动测量系统在带状图数据获取中的关键技术,对于减轻作业强度、提高作业效率、缩短作业周期具有重要现实意义[6-7]。
一、车载LiDAR在轨道线带状图测量高程中应用实践
1. 车载LiDAR特点
本文以国产SSW车载LiDAR系统为硬件平台,基于该系统进行了轨道线带状图高程测量试验。SSW车载LiDAR系统主要由GPS、IMU、三维激光扫描仪、面阵CCD相机、车轮里程计等核心传感器和车载计算机构成。其中,GPS及IMU系统获取的原始数据称为POS数据。POS数据是为系统提供绝对位置及姿态信息;车轮里程计提供各个时刻的行驶距离;位于顶部的6台面阵CCD相机可以实现360°全景纹理获取;激光扫描仪呈斜向上45°实现360°旋转扫描,最远测距可达300 m,标称测距精度2 cm/100 m,激光点扫描频率50~200 kHz,点云间距最高可达1 cm,理论上可以满足轨道线带状图高程信息采集需求[8-9]。
2. 轨道线带状图测量高程精度要求
城市轨道交通选址都在城市主要干道上,其规划设计、工程施工对高程精度要求高于一般地形图的需求,高程精度要求在5 cm以内[10]。城市轨道线有其特殊性,越靠近轨道线中心附近的位置测量精度要求越高,常规仪器观察费时费力,精度较难保证[11]。另外,城市主要干道上行人和车流量特别大,白天使用常规仪器观测受到极大干扰,夜间不能进行,实施效率非常低,而车载LiDAR系统不受光线限制,昏暗和夜间都不影响测量,另外夜间车辆、行人较少,测量作业效率得到大大提高。
3. 轨道线带状图高程测量试验
为检验不同因素对LiDAR点云精度的影响,采集分为A、B两个试验区段。A段建筑物、行树较少,没有遮挡,对GPS信号影响较弱;B段高层建筑物较多,预计部分地段GPS信号会受到遮挡。试验扫描区间A、B两段均为城市交通主要道路,采用单向扫描和双向往返扫描两种方式,车速分别为5和25 km/h,控制点间距一种为系统建议间距3 km,另一种控制点间距为1 km,进行16次的组合扫描试验。试验区内共布设600个检查点,检查点布设均匀,距离规划扫描轨迹线最大距离120 m左右,检查点的平面坐标采用省CORS实测,高程测量方式采用四等水准连测,以保证检查点的点位精度。
4. 不同扫描方式的高程精度比较
数据采集后,将A、B两段试验线路中的检校点高程精度相对比,A段1 km间距检校点和3 km间距检校点精度对比结果如图1和图2所示。
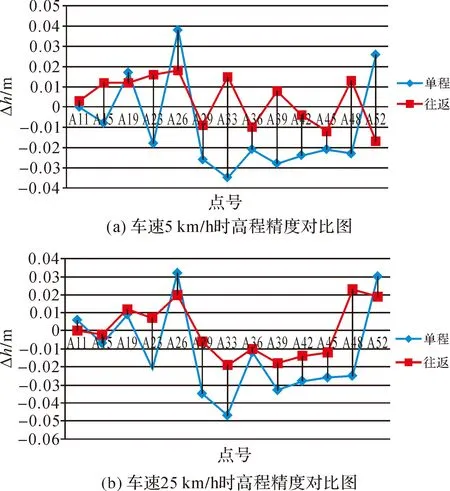
图1 A段1 km间隔检校点高程精度对比图
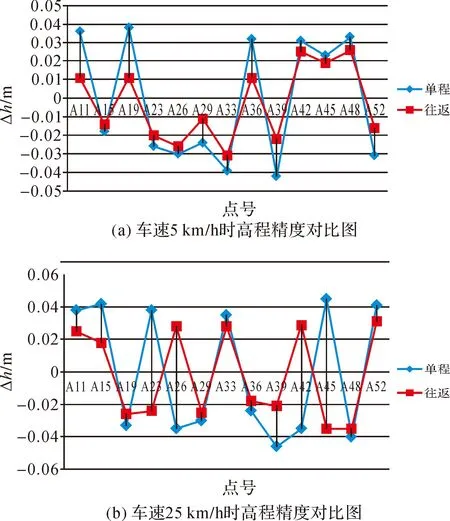
图2 A段3 km间隔检校点高程精度对比图
从图1中(a)、(b)的对比结果和图2中(a)、(b)的对比结果得出,采取往返扫描的作业方式,能够有效地提高作业精度。图1—图2的对比分析表明,在平稳路段,车速对扫描精度的影响较小,但在颠簸路段(A42—A48),适当降低车速有利于采集精度的提高。
B段1 km间距检校点和3 km间距检校点精度对比结果如图3和图4所示。
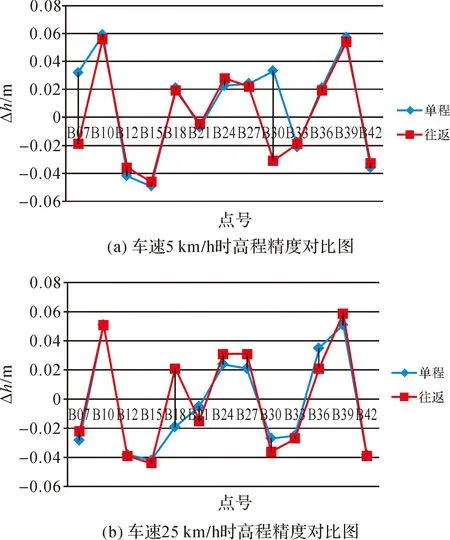
图3 B段1 km间隔检校点高程精度统计图
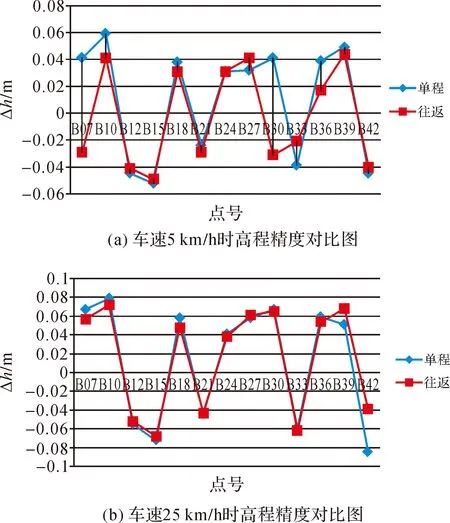
图4 B段3 km间隔检校点高程精度统计图
通过图3和图4的对比分析可知,虽然采用往返扫描所采集的LiDAR点云高程精度高于单程扫描的点云精度,但B段道路中GPS信号遮挡较为严重,点云精度依然较差。由此可见,GPS信号的强弱对数据采集精度的影响较大。
对B段道路数据重新采集,在1 km一个检校点情况下,适当补增控制点数量,采用往返扫描的作业方式。其高程精度统计图如图5所示。
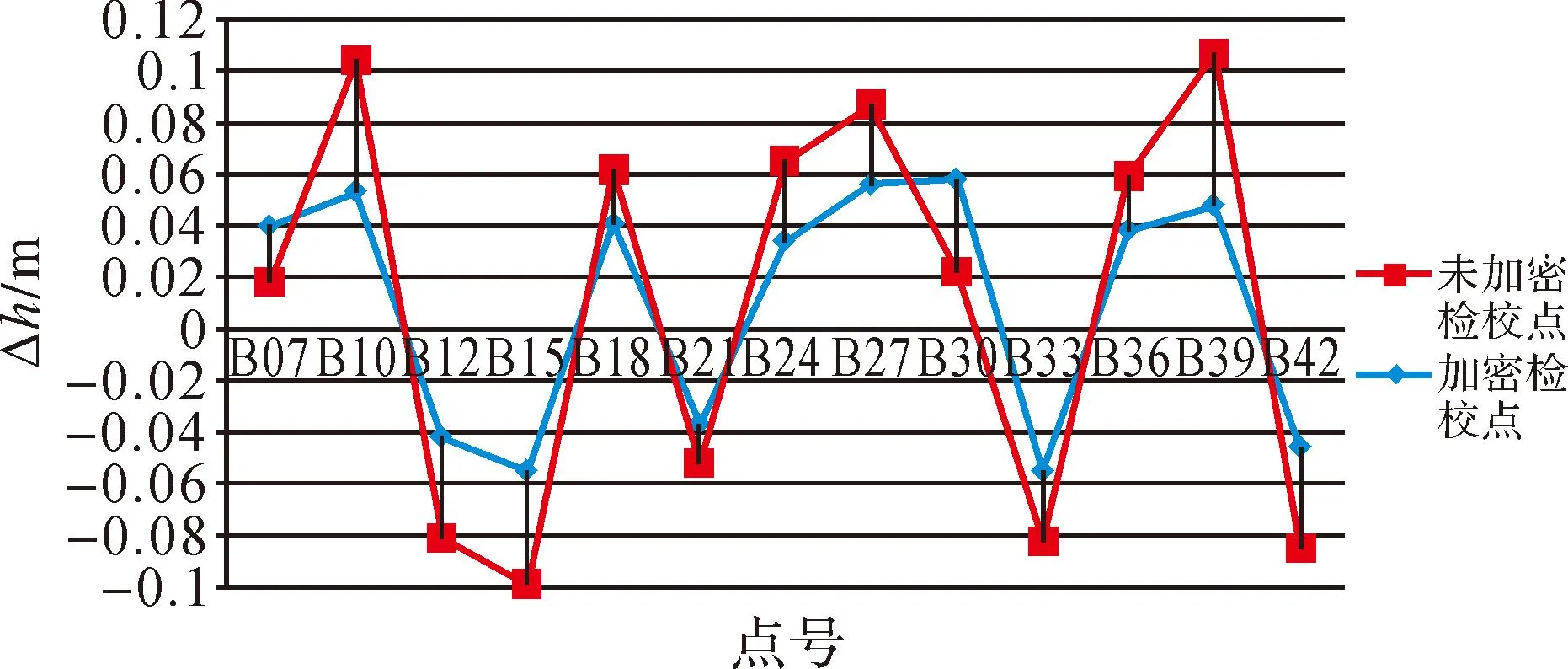
图5 B段1 km间隔增加检校点高程精度
图5表明,当GPS信号失锁时,适当增加控制点密度,并采用往返扫描的作业方法,可以有效地提高点云精度,达到城市轨道交通带状图测量的精度要求。
5. 点云高程精度的影响因素分析
试验数据结果表明,点云高程精度受GPS信号、控制点间距、扫描方式的影响较大,车速对点云精度的影响较小,其中GPS信号对数据精度影响最大。若GPS信号失锁时间过长时,整体精度受影响较大,特别是控制点为3 km间隔时,高程精度不能满足要求,若在GPS信号遮挡较为严重的区域增补控制点,可以提高点云高程精度,从而达到作业精度要求。
二、结论与应用
1. 结论
1) 在GPS信号、车速、检校点间距若干因素中,GPS信号的强弱决定着点云数据的整体质量。
2) 在外业采集作业中,采用往返扫描的作业方式,可以有效减小系统误差对点云精度的影响。
3) 适当增加检校点密度,可以提高点云精度;在道路不平整的路段,应尽量降低车速,保持车身平稳。
4) 在GPS信号较好的情况下,扫描半径范围(约150 m)内的点云可以满足精度要求;在GPS信号失锁时,采取往返扫描的作业方式,并增加控制点密度,也能达到精度要求。
2. 应用
在此次试验的基础上,利用SSW车载LiDAR系统在郑州市地铁2、3、5号线带状地形图高程测量应用上进行了尝试。作业模式采用双向往返扫描,激光转速3600转/min,点频200 kHz,平均车速20 km/h,每隔1 km设置一个对中杆,用来控制和检校数据精度,整个带状图测量项目往返扫描总计约150 km。每个项目外业扫描投入5人,4天完成数据获取,内业投入3人,1周完成数据处理采集。经检验,其高程精度完全满足轨道线带状图的精度要求。实践表明,该方法取得比传统水准测量更好的效果,提高了测图精度和效率,完全能为地铁规划设计、征地拆迁、线路施工等提供可靠、高精度的地形图资料。
参考文献:
[1]张攀科,张伟红,王留召.车载激光扫描系统在道路断面采集中的应用[J].测绘与空间地理信息,2014,37(11):59-62.
[2]许娅娅.GPS RTK的发展及其在公路测量中的应用[J].测绘通报,2007(2):18-20.
[3]宋新龙,田耀永.机载LiDAR扫描数据深加工及应用研究[J].测绘通报,2012(S1):317-319.
[4]骆云飞,王书民.车载LIDAR系统在道路勘测中的数据获取及应用[J].测绘通报,2012(S1):362-364.
[5]CHENG L,ZHAO W,HAN P, et al. Building Region Derivation from LiDAR Data Using a Reversed Iterative Mathematic Morphological Algorithm[J]. Optics Communications, 2013:286 (1):244-250.
[6]魏来.移动测量系统在城市绿化管理系统建设中的应用[D].长春:吉林大学,2014.
[7]HU Y. Automated Extraction of Digital Terrain Models, Roads and Buildings Using Airborne LiDAR Data[D]. Calgary:University of Calgary, 2003.
[8]SSW车载激光建模测量系统[EB/OL].[2014-04-15]. http:∥www.1718196.com/pdshowtwo/product show-10686759.htm.
[9]王留召,韩友美,钟若飞.车载激光扫描一距离测量参数标定[J].测绘通报,2010 (1):19-20.
[10]中华人民共和国建设部.城市轨道交通工程测量规范:GB 50308—2008[S].北京:[s.n.],2008.
[11]杨伯钢,韩友美.车载移动激光扫描技术大比例尺测图技术分析[J].测绘科学,2013, 38(1): 106-108.
中图分类号:P237
文献标识码:B
文章编号:0494-0911(2016)03-0070-03
作者简介:韩尚(1975—),男,高级工程师,主要研究方向为LiDAR数据处理、地理国情监测、遥感应用等。E-mail:78064318@qq.com
基金项目:福建省测绘地理信息科技创新基金(2014J03)
收稿日期:2015-12-01
引文格式: 韩尚. 车载LiDAR用于轨道线带状图测量的高程精度分析[J].测绘通报,2016(3):70-72.DOI:10.13474/j.cnki.11-2246.2016.0089.