真空断路器机械特性及其测量技术的分析与研究
2016-05-04吴晗序
吴晗序
(国网辽宁省电力科学研究院,辽宁 沈阳 110003)
真空断路器机械特性及其测量技术的分析与研究
吴晗序
(国网辽宁省电力科学研究院,辽宁 沈阳 110003)
本文以12kV弹簧操作机构真空断路器为研究样本,对真空断路器的机械特性的关键监测技术进行了深入研究,重点分析了真空灭弧室的触头内力系统,建立分析方程,并对刚分、刚合点主流的3种采样方式进行了评估和实验验证,包括电流通断法、辅助开关通断法、振动传感器取样,得出了振动传感器取样的最优方案。
真空高压断路器;机械状态监测;触头开断
1 引言
高压真空断路器在电力系统中应用广泛,为保证电力系统的可靠运行,高压真空断路器的机械稳定性十分重要,据统计20世纪末最后的十年中,高压真空断路器的拒分、拒合事故占比为29.15%[1],对沈阳虎石台高压试验站的检测记录进行统计,机械故障缺陷占总缺陷数的36.3%,断路器机械状态的故障呈现多种后果,主要是抵制、锁定故障、开关速度变小等。断路器的故障将造成线路故障扩大,造成母线故障或主变压器故障,并对系统造成巨大的伤害,关闭速度达不到要求,会导致断路器的开断和闭合负荷电流和故障电流不能有效地熄灭电弧,引起过电压或断路器发生爆炸,后果是很严重的[2-3]。
本文意在弹簧操作机构真空断路器的设计理论研究的基础上,从断路器操作机构的动作特性进行分析,通过故障模拟实验,机械稳定性试验发现断路器各机械部分特性变化的信号波形产生相应的变化和相应的数据的变化,基于特征值算法提出,相关曲线和动作诊断技术,尤其是对刚分刚合点的判别技术,以改善综合的监测诊断技术。
2 数据分析和自动诊断算法
通过大量的实验,发现典型的时间位移曲线,速度位移曲线,辅助触头运动曲线,合闸线圈电流曲线,电机电流曲线等波形中含有大量的机械状态信息。进行分析,以产生能有效地反映断路器的触头运动特性,开关控制电路,电动机储能特性,并联系参数值[4],关于特征值的定义,已经有大量文献阐述说明,本文仅对开关触头动作特性进行讨论。合闸和分闸时间-位移曲线按同一方向画图说明,见图1~2。
以合闸时间-位移曲线为例,将曲线分成4段:空程段、开距段、超程段、缓冲段。时间值和相关度反映了动触头在各段所受到的推动力和阻力特性[5]。根据开关的分合闸位置可算出开关的刚分速度和刚合速度。最大速度以及最大速度对应时间也可根据时间位移曲线计算,这组特征值可有效反映机构的动作特性。另外增加启动速度和缓冲速度特征值以反映缓冲弹簧的性能。

图1 合闸时间位移曲线

图2 分闸时间位移曲线
3 触头系统负载分析
3.1 真空灭弧室触头系统负载分析
如图3~4 所示,Fn—真空断路器触头压力;F1—静触头对动触头产生的支撑力;Fe1—静触头对动触头产生的反向电动力;F2—动触头对静触头产生的支撑力;Fe2—动触头对静触头产生的反向电动力;Fz—真空断路器支撑结构对静触头产生的支撑力。系统在稳态下,有Fn=Fz。 (1)对于动触头,总是保持F1+Fe1=Fn。动触头在工作过程中,负载电流从零开始增加,F1大小从Fn变化为零;Fe1大小从零变化为Fn。
(2)对于静触头,总是保持F2+Fe2=Fz。静触头在工作过程中,负载电流从零开始增加,F2开始减小,其大小从Fz变化为零;Fe2开始增大,其大小从零变化为Fz。根据上述分析,F1和F2是一对大小相等方向相反的作用力和反作用力,它们的大小决定了动静触头之间的实际接触压力。若保持正常工作,F1和F2的数值量需要在零和Fn之前。
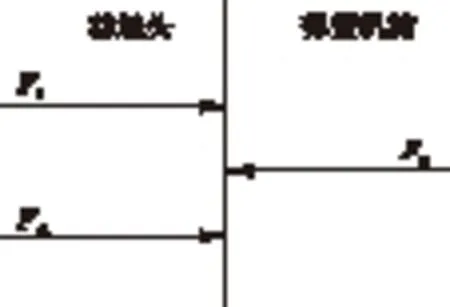
图3 真空断路器动触头受力分析

图4 真空断路器静触头受力分析
3.2 触头系统临界负载分析
当真空断路器带负载运行时,在电流作用下,真空断路器动触头和静触头之间产生的反向电动力达到触头弹簧压力时,动、静触头间的接触压力为零,如图5~6。在真空灭弧室中,触头系统在工作过程,因为有Fn=Fz;F1+Fe1=Fn;F2+Fe2=Fz;并且当负载电流从零增加,F1大小从Fn减小为零;F2大小从Fz减小为零;Fe1与Fe2大小从零增大为Fn。所以,当Fe=Fn;对于动触头,F1=0。对于静触头,F2=0。也就是说真空灭弧室中触头系统在临界负载状态下动、静触头间压力为零。

图5 带负载的真空断路器动触头临界状态受力分析

图6 带负载的真空断路器静触头临界状态受力分析
真空灭弧室中触头系统工作过程中,动触头与静触头之间的反向电动力实际上是系统的内力,并不能让系统能量产生变化,只有当Fe>Fn时,动触头会被斥开。一般情况下,考虑系统的强度和刚度,Fn远小于Fz的最大值。真空断路器是根据短路开断、关合能力来设计的,也具备动热稳定能力。所以真空断路器触头弹簧压力设计是根据就是在额定短路条件下产生的最大反向电动力。又因为触头弹簧的压力是操动机构的主要工作负载,所以这也是操动机构的设计依据。
4 真空断路器的负载特性
断路器在关合过程中,电动力作用在超程阶段。根据之前的分析,在接触行程阶段,电动力只是触头系统的内力,不是操动机构要克服的负载,操动机构克服的负载只能是触头弹簧在压缩过程中产生的反作用力。因此真空断路器的负载参数应该如图7所示。

图7 真空断路器的负载参数曲线
5 监测分、合闸时动触头的行程-时间特性
5.1 差动变压器式位移传感器
根据不同的力学参数,对断路器机械故障的一般判断。断路器行程-时间特性监测的困难在于行程传感器不能安装在可动触头上,因此不能直接测量的触头行程,因此被转化或重新制定监测的技术条件。目前,多采用光电式位移传感器和差动变压器式位移传感器与相应的测量电路检测。
差动变压器式位移传感器,包括一个轴向式感应变压器和轻便磁心,可以在其轴向自由移动。断路器,在断路器分合闸时主轴杆运动带动位移传感器的金属杆相对轴电感变压器运动,通过位移传感器可以被转换成输出电压同步变化[6]。虽然直流差动变压器式位移传感器的动态接触行程信号测试的测量结果是比较理想的,但是结构很紧凑型断路器,安装传感器的位置极为有限。
5.2 增量式旋转/直线光电编码器
增量式旋转光电编码器或直线光电编码器也常被应用,它的工作原理如下:在断路器的直线运动部件上安装光电编码器,或旋转光电编码器安装在断路器的操作机构的主轴,通过传感器,分合操作时,操作机构的运动信号波形。通过光电转换,利用旋转编码器的输入轴的角位移传感器的一个圆光栅是用来转换轴的旋转角度为电脉冲信号。利用动触头行程时间波形,可以计算出运动时间、行程速度和动触头的运动速度。
测量动触头行程信号时,便于采用转角法和光栅法测量,但当断路器跳闸比较小,主轴旋转角度小,使用转角法测量响应速度差,精度不高。此外,转角法和光栅法需要更多的电子元件,操作很复杂,测量的结果是不理想的,并且在实际操作领域的高压断路器,断路器的合(分)操作和低压交流(直流)回路内运行的电气设备操作,电气设备周围的静电场,电磁波的辐射和传输线路或设备故障产生的暂态变化过程中会产生电磁干扰和巨大的振动都会严重干扰编码器。
6 刚分、刚合信号的获取方法
刚分、刚合点的获取在机械特性的测试中至关重要,测试中判断精确度要求很高。在设计测试时,共使用了3种方案来获取刚分、刚合点:
(1)根据主回路的电流通断来判断刚分、刚合点,通过实验证明存在一些问题。首先在三相交流电是过零回路的主回路中并不好判断线路的通断,刚分、刚合时的采样被主回中产生的非50Hz谐波电流干扰。之后考虑将电流整流成直流判断,但是线路的滞后性较大,导致机械特性参数的计算误差很大。
(2)根据辅助开关的通断来获取刚分、刚合点。文献[7]描述了采用辅助开关来获取触头刚分、合信号,辅助开关安装位置的很大关系上影响了通断误差,即使辅助开关在合适的位置被安装,在辅助开关的长期使用中也会增加机械系统误差。
(3)根据振动传感器来获取刚分、刚合点。振动传感器在有振动时输出随振动频率和振幅大小输出相对应的频率和振幅波形的交变电压信号。监测断路器的机械振动信号,利用振动传感器采集振动信号,通过时分析技术提取状态特征参量,为断路器的机械故障诊断提供依据。
作为被测物体的附加质量的传感器必然影响被测物体运动状态,因此要求传感器的质量远小于被测物体传感器安装点的动态质量。传感器的灵敏度越高,抗干扰能力越强,信噪比越大。就特定结构的传感器来讲,灵敏度越高,传感器的重量越大,量程和谐振频率也越低。尽量选择高灵敏度的传感器,这样可降低信号调理器的增益,提高系统的信噪比。在12kV真空断路器上安装振动传感器,在实验中和做了800次的合闸动作并与传统的离线测量刚合点信号的方法进行对比,确认到传感器最大振幅信号与传统离线测量刚合点信号最大误差在时间轴上相差61μs,测量波形如图8所示。
因为刚分点信号物理震动难以测得,对于其的获取方法,本文采用自适应算法。利用断路器的分闸和合闸长度位移轴上的相同特征,算法只需通过收集的分闸时的长度位移值和时间值,根据刚合点在长度位移轴上的位置,即可得出分闸动作位移时间上刚分点的位置,从而确定对应刚分点的位置的时间。

图8 刚合点震动传感器输出波形
7 结语
本文对真空断路器的机械特性的一些关键监测技术进行了讨论,重点分析了真空灭弧室的触头内力系统,建立分析方程,解释了接触行程阶段真空灭弧室动、静触头之间的电动力不是操动机构要克服的负载,而是触头系统的内力,操动机构克服的最大负载只能是触头弹簧在压缩过程中产生的反作用力。以12kV真空断路器为实验对象对刚分、刚合点主流的3种采样方式进行了评估和实验验证,包括电流通断法、辅助开关通断法、振动传感器取样,给出了振动传感器测量刚分点的指导性方案。
[1] 刘全志,师明义,秦红三,等.高压断路器在线状态检测与诊断技术[J].高电压技术,2001,27(5):29-31.
[2] 郭碧红,杨晓洪,甄为红,等.国内电力设备运行在线监测装置的开发、应用、主要性能情况调查[M].北京:中国电力科学研究院,1998.
[3] 林 莘.现代高电压技术[M].北京:机械工业出版社,2011.
[4] 常 广,王 毅.高压断路器机械特性在线监测装置的研 究[J].高压电器,2003,39(2):44-47.
[5] 郭贤珊,李仲夫.试验电源在断路器机械特性试验中的影响[J].华中电力,1999(2):15-17.
[5] VOUMARD P R.A simple approach to condition monitoring of circuit breakers[C]//CIGRE Session 1994:13203.
[6] 王昌钧.SF6 高压断路器机械参量在线监测系统[J].电网技术,1999,23(7):34-37.
[7] 杨壮壮,徐建源,李 斌,等.高压真空断路器机械状态 监测系统研制[J].高压电器,2013,49(8):26-34.
Analysis and Research on Measuring Technology of Mechanical Characteristics for Vacuum Circuit Breaker
WUHan-xu
(Liaoning Electric Power Research Institute,Shenyang 110003,China)
It takes 12kV spring operating mechanism of vacuum circuit breaker as the research sample,and the key points of monitoring the mechanical characteristics of vacuum circuit breaker were studied,focusing on analysis of the vacuum arc extinguishing chamber of the contact force system,build up analytical equations,and the jus,just close the main point of three sampling methods were evaluated and verified experimentally,including current through breaking,auxiliary switch through breaking,vibration sensors and sampling,the vibration sensors and sampling of the optimal scheme is obtained.
vacuum high voltage breaker;Mechanical condition monitoring;Contact opening
1004-289X(2016)05-0068-03
TM561
B
2016-06-18
吴晗序(1985-),男(汉族),辽宁沈阳人,硕士,主要研究方向:真空断路器,在线监测技术。
