自适应卡尔曼在延长土壤墒情监测节点寿命中的研究*
2016-05-03梁西银西北师范大学物理与电子工程学院兰州730070
梁西银,钟 伟,祁 磊(西北师范大学物理与电子工程学院,兰州730070)
自适应卡尔曼在延长土壤墒情监测节点寿命中的研究*
梁西银*,钟伟,祁磊
(西北师范大学物理与电子工程学院,兰州730070)
摘要:土壤墒情的WSNs监测节点由于工作环境的制约,一般采用一次性的干电池供电,节点的电源供应受到约束。针对节点使用寿命短的问题,方法提出了一种网络传输效用和使用寿命的折衷优化方法。通过卡尔曼滤波器对数据进行状态预测和稳定识别,在保证数据传输效用的同时,降低单个节点的数据发送次数和频率,进而延长节点的使用寿命。通过实验从平均发送频率和均方误差两个方面对方法进行评价,结果表明,方法在保证传输效用的同时,能自适应地动态降低发送次数和频率,经过测试和计算,每减少收发一次能延长休眠时间19 927.3 ms,延长监听时间为17.3 ms,取得良好效果,方法在延长农业土壤墒情的监测时间方面提供了一定参考。
关键词:无线传感器网络;土壤墒情;卡尔曼滤波;降低功耗
项目来源:甘肃省科技支撑计划项目(1304GKCA024)
土壤墒情,是用来描述土壤含水量状况的物理量[1]。水分是土壤肥力的重要组成部分,实际含水量的多少表征着土壤适宜农作物生长发育的程度,因此往往需要对土壤墒情进行实时的不间断的监测,作为防洪、抗旱、播种等决策的重要指标[2]。由于工作环境和成本等因素的影响,土壤墒情监测多采用无线传感器网络(WSNs)和干电池供电作为监测方案,监测时限受到监测节点使用寿命的制约。
无线传感器网络(WSNs)是集信息采集、传输和处理技术于一体的分布式网络信息系统,应用前景非常广泛[3]。由于工作环境和成本等因素的影响,多采用干电池供电作为供电方案,无线传感器网络节点使用寿命受到制约[4],如何降低WSNs节点的功耗成为研究和设计无线传感器网络的核心问题[5-6],这方面的改善对节点使用寿命的延长和性能的优化有着重要的意义,进而提高土壤墒情的监测时间。目前有关WSNs节点降低功耗方面的研究成效主要集中在两个方面:一方面在硬件上提高电源的供应量,这方面的研究主要集中在采用太阳能充电技术上,如胡奇勋等提到的使用太阳能充电技术为检测节点供电[7],而这样会增加额外的硬件成本;另一方面主要在软件算法设计上的优化设计达到降低功耗的效果,这方面研究主要集中在传感器协同,拓扑控制、传输协议、减少通信冲突、降低旁听、减少由于网络堵塞和数据拥堵造成的不必要能量消耗和工作模式切换等方面[8- 13],如Paulo Sergio Sausen等提出在通过监测外部事件采用不同的电源管理模式,当事件不是系统感兴趣的事件时,系统处于休眠状态,否则系统转换为工作状态[14],这种方法在模式转换不频繁的时候非常有效,但当随着转换频率的提高,转换过程中造成的能量消耗和系统迟延问题就凸显了出来。以上研究大多是集中在整个无线传感网络的通信机制和路由算法上的研究,由于研究时多采用封装好的成品,很难对单个节点的结构进行修改,利用算法在单个节点上减少通信量的应用研究还相对较少,方法在单个节点内利用卡尔曼滤波器对系统状态进行预测和判断,在保证传输效用的同时,通过降低数据的冗余度,进而减少单个节点的通信量,降低节点功耗,在网络传输效用和使用寿命之间提出一个折衷方案。经过大量的实验证明了该方法的有效性。
1 WSNs节点结构特点
作为无线传感器网络的基本构成单元,WSNs节点主要有4个模块组成:MCU模块、传感器模块、通信模块和电源模块[3]。其中,传感器模块主要负责对环境数据的采集;MCU模块主要负责整个WSNs节点的通信和功能协调;通信模块主要负责将MCU模块的指令发送给其他WSNs节点,或者进行反向操作;电源模块负责给其他三个模块提供电力供应。
在WSNs节点的四个模块中,现有的低功耗处理器技术已经相当成熟,使得WSNs节点中MCU模块的耗能得到很大程度的降低[4]。虽然在传感器模块方面的耗能根据选用传感器的种类有所不同,但总体来说通信模块才是消耗WSNs节点能源的主要元件,使得数据通信的功耗远远高于数据处理的功耗。有数据显示,将lkbit数据无线传输100米所耗能量可让100 MIPS的处理器处理3百万条指令[4],可见节点在数据处理方面的能耗比数据通信小得多.。在WSNs节点的研究和设计时,,除了合理选择硬件结构之外,从数据通信入手可有效减低整体WSNs节点的功耗,方法通过减少数据通信次数和频率,提高能源使用效率来延长网络的生命周期。
2 卡尔曼滤波
卡尔曼滤波是一种通过方差最小准则估计出所需信号的一种实时递推算法[15]。采用状态空间方法描述系统,Kalman滤波的系统方程和观测方程如下[15-16]:

式中Xk是系统的n维状态向量,Wk是p维系统过程噪声序列,Φk,k-1是系统的m×n维状态转移矩阵,Γk,k-1是n×p维噪声输入矩阵,Zk是系统的M维观测序列,Vk是m维观测噪声序列,Hk是m×n维观测矩阵。
关于系统噪声和观测噪声的统计特性,假定如下:
式中,Qk是系统过程噪声Wk的p×p维对称非负定方差矩阵,Rk是系统观测噪声Vk的m×m维对称正定方差阵,而δkj是Kronecker-δ函数。
若被估计状态Xk和对Xk的观测量Zk满足式(1)和式(2)的约束,系统过程噪声Wk和观测噪声Vk满足式(3)~式(5)的假设,系统过程噪声方差阵Qk非负定,系统观测噪声方差阵Rk正定,k时刻的观测为Zk,则Xk的估计X(k|k)可按下述方程求解:
状态一步预测X(k|k-1):

状态估计X(k|k):

滤波增益矩阵Kk:

一步预测误差方差阵P(k|k-1):

估计误差方差阵P(k|k):

其中系统维状态转移矩阵Φk,k-1、噪声输入阵和过程噪声方差阵描述的是与系统动态特性有关的信息,根据不同的系统而有所变化。所有的这些方程都围绕一个中心,即正确,合理地利用观测值Zk。
3 方法实现
3.1硬件设计
为验证方法的有效性,构思和设计了一种通过ZIGBEE通信的土壤墒情监测系统。该设计由发送端和接收端两部分构成,其中发送端采用哲勤科技有限公司生产的MS10作为土壤水分传感器进行土壤墒情的采集,采集后将墒情数据送到主控芯片中,主控芯片将数据经方法处理后有选择地将数据通过通信模块发送给接收端,接收端接收到信号后将数据传送给上位机,上位机对接收信号的次数进行计数,由此计算出系统的通信次数和频率。通信采用能较好实现zigbee协议的射频芯片CC1100,主控芯片采用低功耗的STM32F103VET6。接收端同样采用CC1100接收信号,构成整个系统。系统结构框图如图1所示。
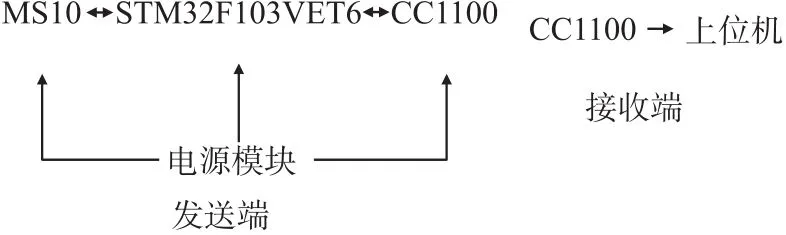
图1 系统结构框图
MS10土壤水分传感器是一款高精度、高灵敏度的测量土壤温度和水分的一体传感器。量程为0~100%容积含水率,精度在0~53%范围内为±3%,适用于土壤墒情监测、科学试验、节水灌溉、精细农业等的测量。
CC1100能同时满足低功耗、低成本和高灵活性的特点,休眠模式、监听模式和收发模式下的功耗分别为0.011 mW、12.7 mW和68.5 mW[17]。
STM32F103VET6是一款高性能、低成本、低功耗的嵌入式芯片,采用的是ARM Cortex-0内核,工作速度可达72 MIPS。
3.2软件设计
3.2.1卡尔曼滤波器的程序实现
在一个滤波周期内,Kalman滤波有两个信息的更新过程:时间更新过程和观测更新过程。Kalman滤波器结构图如图2所示。
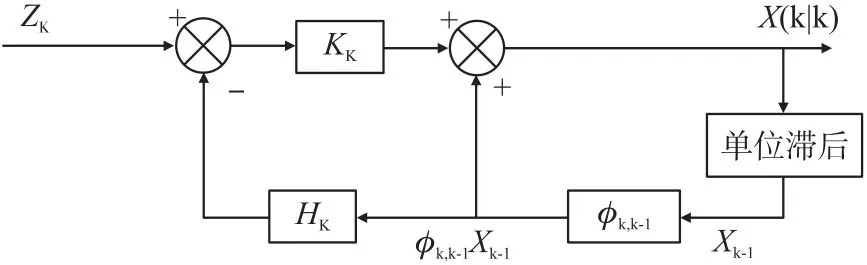
图2 Kalman滤波器结构图
在这两个信息更新过程中,给定土壤墒情的状态初值X0、估计误差方差阵和初值P0后,Kalman滤波器的输入量是系统的时刻土壤墒情的观测值,输出量是系统的土壤墒情估计值X(k|k)。由滤波器的两个信息的更新过程,在具体的程序实现时,同样有两个计算回路:增益计算回路和滤波计算回路。其中增益计算回路是独立计算的,滤波计算回路依赖于增益计算回路。程序流程如图3所示。
文中在郝文泽等人的研究基础上,采用微波调制激光测速体制,设计了一套基于FPGA的软件接收机,接收微波调制激光信号。解调的微波信号通过下变频及数字采样后,在FPGA构建的软件接收机中,使用基于FFT的闭环跟踪方法以及控制主机中的数据后处理,得到激光信号的多普勒频率,实现了高动态范围、快速响应的高精度速度测量,配合高精度信号模拟器验证了测速系统的技术指标。
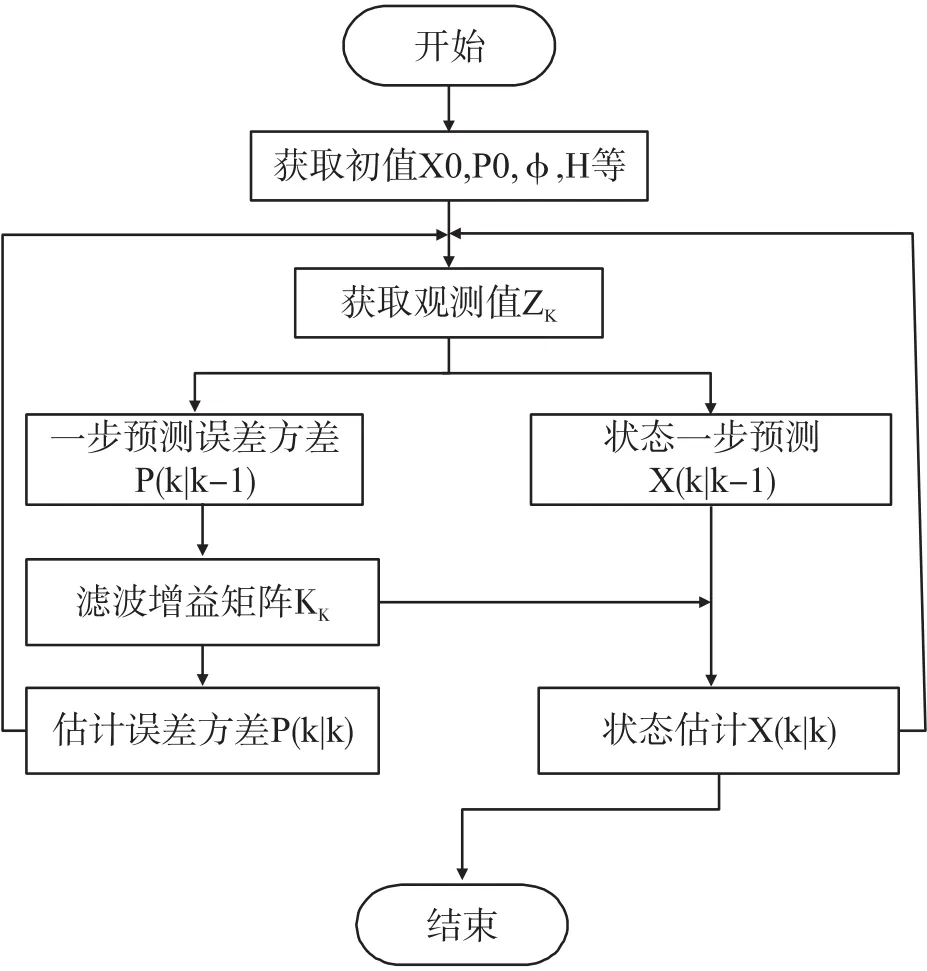
图3 Kalman滤波器程序流程图
由图3可看出,Kalman滤波器的计算是一个不断的进行“预测-修正”的过程,其中滤波器的增益矩阵与土壤墒情观测值Zk无关,可以在观测值获取前执行完增益计算回路,一旦得到了一个新的土壤墒情观测值Zk,马上可以计算得到新的估计值X(k|k),可以提高系统的反应速率,保证较高的实时性。
3.2.2主程序流程
主程序主要实现3个方面的功能。首先。首先主控芯片STM32F103VET6与土壤水分传感器MS10进行通信,MS10开始进行墒情数据采集,主控芯片进而获取土壤墒情数据。其次,将采集到的土壤墒情数据导入卡尔曼滤波器,利用卡尔曼滤波的递推估计能力进行处理,最后根据处理后的结果判断是否启用CC1100进行数据传送。整个软件系统除了要实现功能外,还要考虑整体的稳定性和可靠性,采用模式编程法,根据模式寄存器的状态调用各个子服务程序,使程序得到优化。主程序流程图如图4所示。
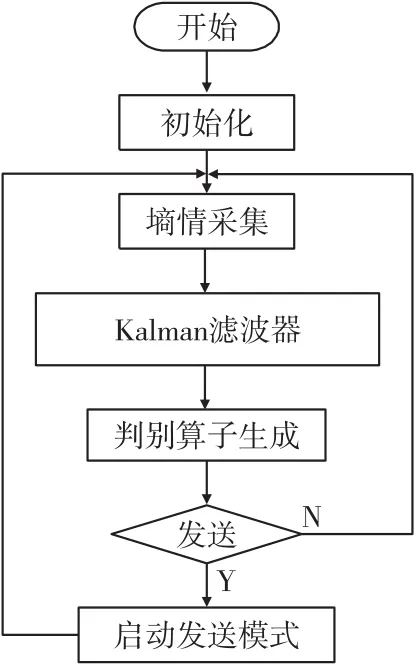
图4 主程序流程图
在系统初始化时,系统的状态初值X0和初值P0的选取相当重要,关系到系统的稳定性问题[18],一个无偏的Kalman滤波器的输出应该能在往后的更新过程中逐渐摆脱所选的两个初始值X0和P0的影响。在初始值的选取时,方法利用前期采集的一些土壤墒情数据作为样本,再与估计值建立回归方程,这里将残差作为系统的初值。
当采集到土壤墒情数据后,立即将数据送入Kalman滤波器进行处理,根据处理结果生成判别算子,当算子的数值达到阈值时,启动发送模块将数据通过Zigbee发送给接收端,这里将阈值设定为0.63%。接收端接收到数据后通过上位机进行计数。
4 效果验证与分析
4.1测试方法说明
在测试过程中,监测网络由3个监测节点组成,分别标记为节点1、节点2和节点3,系统示意图和实际测试场景图分别如图5和图6所示。
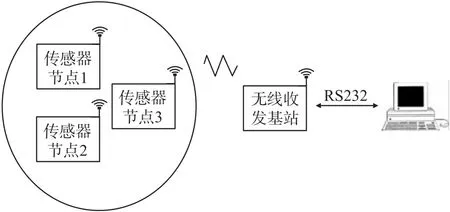
图5 系统示意图
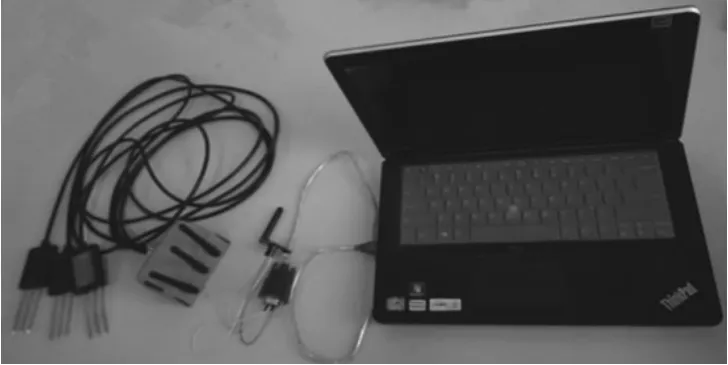
图6 实际测试场景图
取一定质量的土壤放入试验盒中作为标准土样,测试时将图6中的土壤墒情传感器插入土样中。先将土样放入电热恒温式鼓风干燥箱中烘干。然后人为地使用喷水器往土壤中间隔性地喷洒一定质量的水分(约5 g~15 g),当测得的墒情数据达到一定值时,间隔性地用烘干机对土壤进行加热,这样做的目的是人为地创造变化的墒情数据曲线。
在传输效用方面,宏观来看,方法降低功耗的效果是通过减低通信次数换来的,减少了单个节点向网络的数据提供量,必然会降低系统对外界环境的感知度。因此,在降低功耗的同时,网络的传输效用也是需要重点考虑的,最后还要考虑算法造成的能耗。在一般情况下,土壤墒情是一个缓慢变化的量,文中以不使用本方法的每分钟采集100次土壤墒情的第一手数据作为传输效用的参照样本,与标准样本越接近,说明与实际越接近,效果越好,在接收端接收到墒情数据后,将插值后的墒情数据与参照系的数据进行对比,以均方误差作为评价标准。

式中,ESTD为均方误差,Tai是方法的墒情数据,Tbi是参照系的墒情数据,ESTD越小,说明贴合度越高,与实际的误差越小,传输效用越高。
在降低通信频率方面,将方法与滑动平均滤波算法的结果进行对比,为了体现方法能根据环境变化自适应调整通信频率的特点,在不同的墒情变化速率中对系统进行测试,墒情变化速率分别是5%/ min、10%/min和20%/min,观测方法对单个节点以及整个网络能量消耗的影响。
4.2测试结果与分析
4.2.1均方误差
在相同试验条件下,对不同的墒情变化率条件下各测试300组数据,所得结果的均方误差如表1所示。
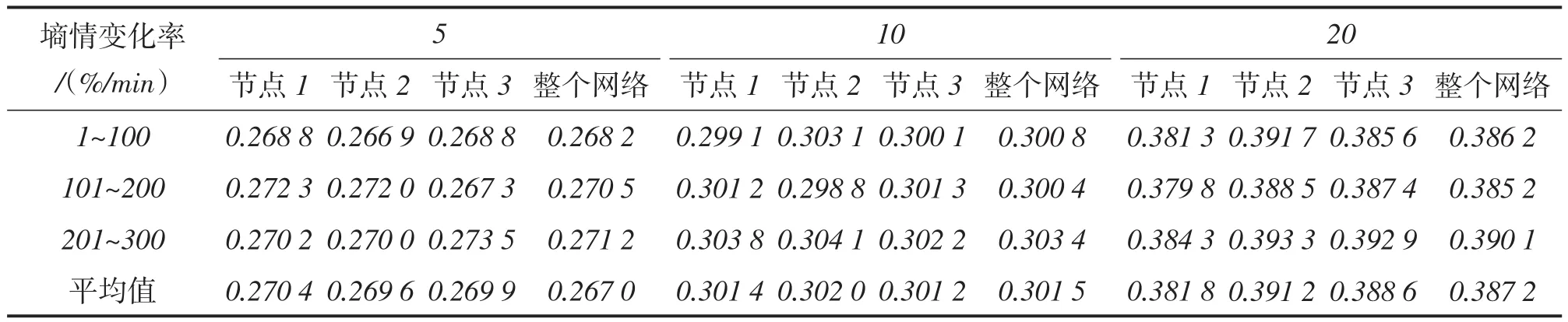
表1 均方误差 单位:%
从表1的数据分析,系统的误差较小,在降低通信频度的同时能保持较高的精度,达到预期效果。而且均方误差的变化与墒情的变化率呈同向变化,墒情变化速率越小,均方误差越低,效果越好。
4.2.2平均发送频率
从平均发送频率方面将使用滑动平均滤波算法的结果与使用方法后的效果进行对比后的结果如表2所示。由表2不难看出,与滑动平均滤波算法相比,方法更能效降低发送频率,墒情变化速率越慢,发送频率降低的幅度越大,通信能耗的降低也越明显.如当墒情变化速率为5%/min时,整个网络减少发送45次/min,节省的通信能耗达18.99%。并且能自动根据墒情环境变化的情况调节发送频率,有自适应的效果。

表2 平均发送频率 单位:次/min
4.2.3算法耗能
由于在过程中加入了算法,算法在执行过程中本身也会产生耗能,所以需要将算法的耗能考虑进去,由于算法只在主控芯片中执行,只需考虑算法执行过程中芯片产生的消耗,实验结果如表3所示。
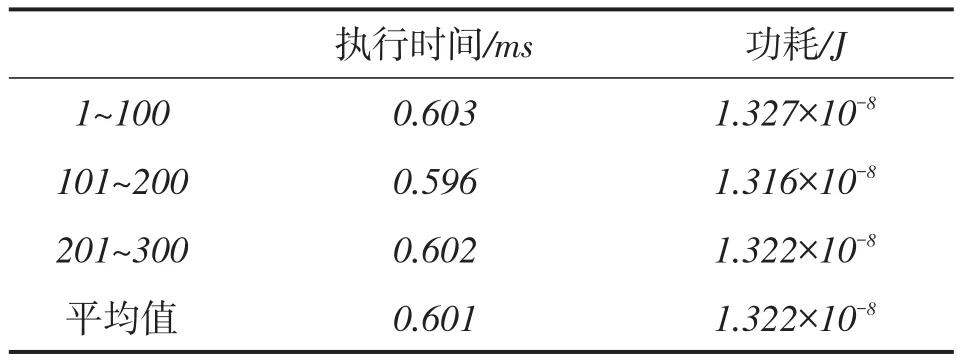
表3 算法耗能
经过测试,完成一次完整的射频收发需要3.2 ms,按收发模式下功率为68.5 mW计算,消耗的能量为2.192×10-4J,算法的平均耗能仅为1.322×10-8J,与其相比可以忽略不计。每减少收发一次能延长休眠时间19927.3 ms,延长监听时间为17.3ms,效果明显。
综上所述,采用方法后在保证传输效用的同时通信频率明显降低,进而能有效降低功耗。而且墒情变化越平缓,贴合度越高,越能有效降低节点的通信频率,通过降低单个节点功耗进而达到降低整个网络能耗的效果.
5 结束语
文中提出了一种兼顾无线传感器网络传输效用和使用寿命的双目标最大化的优化方法,方法采用卡尔曼滤波器进行状态预测和识别,通过降低WSNs单个节点的通信次数和频率来降低WSNs单个节点的功耗,进而延长整个WSNs网络的使用寿命,在降低WSNs节点功耗方面具有较高的可操作性和一定的创新性,并进行了系统设计和大量的测试分析,分析结果表明,方法能有效地降低WSNs节点功耗,尤其是在墒情变化较为平缓的环境情况下,效果最为明显,并且能够根据土壤墒情的变化剧烈程度自适应地调节通信频率,做到实时精确的跟踪环境变化,效果明显。具有方案简单,成本少的特点,具有广阔的应用前景,为无线传感器网络的研究和设计以及延长土壤墒情监测寿命做出了合理参考。
参考文献:
[1]靳广超,彭承琳,赵德春,等.基于ZigBee的土壤墒情监测系统[J].传感器与微系统,2008,27(10):92-93.
[2]樊志平,洪添胜,刘志壮,等.柑橘园土壤墒情远程监控系统设计与实现[J].农业工程学报,2010,26(8):205-210.
[3]乔学工,王哲,王华倩,等.基于权值的非均匀分簇路由算法[J].传感技术学报,2014,27(1):107-112.
[4]毕莹.无线传感器网络节点的低功耗研究[D].吉林:吉林大学,2008.
[5]汪立林.无线传感器网络节点超低功耗的系统级实现方法研究[D].长沙:中南大学,2009.
[6]Yick J,Mukherjee B,Ghosal D. Wireless Sensor Network Survey [J]. Computer Networks,2008,52(12):2292-2230.
[7]胡奇勋,段渭军,王福豹.无线传感器网络节点太阳能电源系统设[J].现代电子技术,2011,34(6):199-201.
[8]李秘,花仕海,李贵柯,等.基于电量检测的WSNs智能休眠方法[J].传感器与微系统,2014,33(11):27-33.
[9]王晓东.无线传感器网络节能算法研究[D].杭州:浙江大学博士学位论文,2007.
[10]Mills K L. A Brief Survey Self-organization in Wireless Sensor Networks[J]. Wireless Communications and Mobile Computing,2007,7(7):823-834.
[11]Hou Y T,Shi Y,Sherali H D. Rate Allocation And Network Life⁃time Problems for Wireless Sensor Networks[J]. IEEE/ACM Transactions on Networking,2008,16(2):321-334.
[12]陆亚芳,易可夫,冯绪,等.基于模糊理论的无线传感器网络多层分簇式路由算法[J].传感技术学报,2014,27(7):1933-938.
[13]彭俊先.无线传感器网络簇内节点能量管理方法研究[D].长沙:中南大学,2012.
[14]Paulo Sergio Sausen,JRDB Sousa,MA Spohn,et al. Dynamic Power Management with Scheduled Switching Modes[J]. Com⁃puter Communications,2008,35(15):3625-3637.
[15]彭丁聪.卡尔曼滤波的基本原理及应用[J].传感技术学报,2009(8):32-34.
[16]Shutao Xing,Marvin W Halling,Shuwen Pan. Application of Sub⁃structural Damage Identification Using Adaptive Kalman Filter[J]. Journal of Civil Structural Health Monitoring,2014(4):27-42.
[17]Texas Instruments.CC1100,Low-Power Sub-1 GHz RFTRansceiver [EB/OL].http://www.ti.com/lit/ds/symlink/cc1100.pdf,2014.
[18]孙健,张纯,陈书恺,等.基于季节模型及Kalman滤波的道路行程时间[J].长安大学学报(自然科学版),2014(34):145-151.

梁西银(1971-),男,副教授,硕士生导师,主要研究领域为传感器网络技术研究,嵌入式系统及可编程逻辑器件设计,计算机测量与控制方向等研究;

钟伟(1991-),男,硕士研究生,研究方向为传感技术,嵌入式设计,计算机应用研究;
祁磊(1987-),男,硕士研究生,研究方向为计算机测量与控制。
Research on Extending the Life of Soil Moisture Monitoring Node by Using Self-adapting Kalman Filter*
LIANG Xiyin*,ZHONG Wei,QI Lei
(College of Physics and Electronic Engineering,Northwest Normal University,Lanzhou 730070,China)
Abstract:Due to constraints such as working environment,disposable batteries with limited electrical energy were commonly used in soil moisture monitoring node. In order to solve this problem,an optimal Utility-Lifetime tradeoff method was set up. Kalman filter was used to identify the state prediction and stability of data and reduce the num⁃ber of data and frequency. The service life of the node is extended by the method.Average frequency of the experi⁃ment and the curve fitting were used to evaluate the method. Through test and calculation,each time of reducing can prolong the sleep time of 19 927.3 ms and extend the monitoring time of 17.3 ms. Method provides a certain ref⁃erence in extendingthe time of monitoringagricultural soil moisture.
Key words:wireless sensor network;soil moisture;Kalman filter;reducingpower consumption
doi:EEACC:6150P10.3969/j.issn.1004-1699.2016.03.023
收稿日期:2015-10-27修改日期:2015-12-21
中图分类号:TP393
文献标识码:A
文章编号:1004-1699(2016)03-0439-06