简易风洞测控系统设计
2016-05-03西北大学信息科学与技术学院王敏敏王瑞鹏
西北大学信息科学与技术学院 王敏敏 王瑞鹏
简易风洞测控系统设计
西北大学信息科学与技术学院王敏敏王瑞鹏
【摘要】本文设计了一个基于简易风洞的测控系统。该系统选用MSP430F5529单片机作为主控核心,利用超声波测距模块检测简易风洞中小球的精确位置,通过PID算法调节风机转速,进而控制小球完成指定动作,为了追求更好的人机交互体验,采用了液晶屏显示操作方法及管中小球状态的保持时间,并且可通过矩阵键盘控制简易风洞中小球的动作及位置。
【关键词】风洞控制;测控系统;PID控制
在现代飞行器的研发测试中,风速、压力、温度等物理量是非常重要的外部影响参量,但在实际情况下这些物理量不易调控,故现代飞行器的研发离不开风洞,现代实验风洞能够模拟大部分现实情况,并且可以控制许多影响参量,通过风洞测试中所得数据结合空气动力学理论可以衡量一架飞行器的性能。
本文设计了一个简易的风洞测控系统,风速是此风洞的可变因素,温度、压力等物理量不在本次设计考虑范围内,风速的调控体现在控制风洞中物体的运动上,具体实现了小球在简易风洞中动作与位置的实时测控。
1 系统总体设计
在整个测控系统的设计思路中,主要包括硬件设计方案和单片机程序设计方案。该系统的总体设计结构如图1所示,输入模块可以选择系统的工作模式,即小球的运动方式,同时显示模块可以显示操作帮助、小球的位置和保持时间。选择一种工作模式后,通过测距模块实时感知风洞中小球的位置,结合PID控制算法,主控核心单片机可输出相应占空比的PWM波控制电机的转速以产生不同的风力,使小球完成设计的动作任务。

图1 系统结构图
2 硬件设计
系统中简易风洞的硬件设计由风机、PVC管、PVC连接块简易加工而成,在PVC管中间开凿了一个38cm的长方形槽孔以方便观察管中小球的位置。电路硬件主要由主控模块、电机驱动模块、输入模块、测距模块以及显示模块构成。
2.1主控模块
采用MSP430系列中的MSP430F5529型号单片机作为本系统的主控核心。MSP430是一种应用较广的16位单片机,具备超低功耗和高性能等特点。它具有高度的集成度,只要添加少量的外围器件,就可以实现一般的功能。
2.2电机驱动模块
系统使用的L298N模块作为电机驱动,L298N是一种常用的电机驱动芯片,具有高电压、大电流、易使用等特点,应用比较广泛,可用作步进电机或直流电机的驱动。通过控制输出PWM信号来调节加在电机两端的电压,进而可以使电机以不同的速度运转。
2.3输入模块
因主控板的IO口资源有限,故使用矩阵键盘来节省IO口,通过矩阵键盘扫描可以检测哪个按键按下。
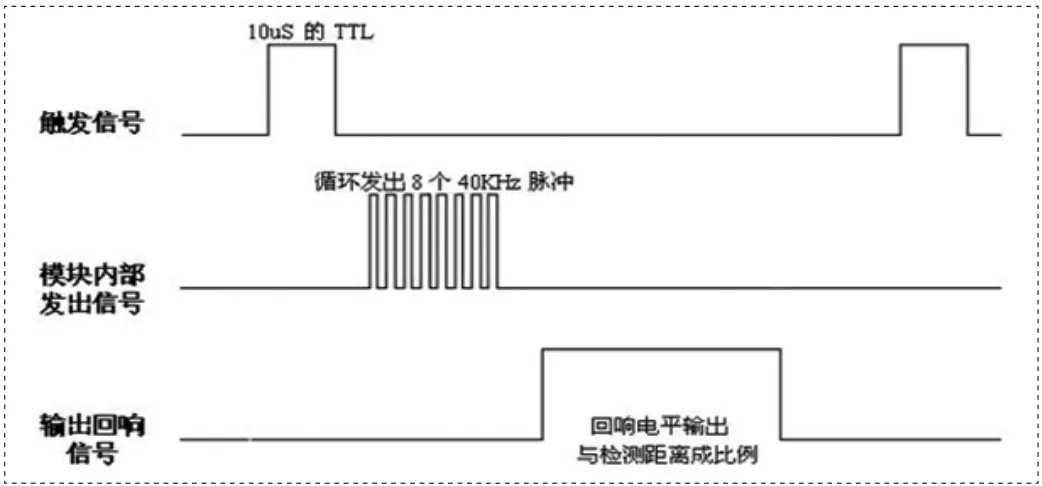
图2 超声波模块工作时序图
2.4测距模块
HC-SR04超声波传感器可实现精确的超声波测距功能且操作简易,故采用作为本系统的测距模块。如图2所示,主控板只需给Trig控制端输入10us以上的高电平激励,该传感器本身就可自动发射超声波信号,待接收端检测到反射回来的超声波,输出端Echo可输出高电平信号,此电平信号持续时间与超声波反射回来所用时间成比例,通过主控板中的定时器可以检测此高电平的持续时间T,使用公式S=V*T/2即可得到与被测物体的距离。
2.5显示模块
LCD12864是一种使用广泛的液晶显示屏,相对于另一种液晶显示屏LCD1602,其优点在于LCD12864其数据传输不仅支持并口,而且可以进行串口传输,其整屏也可以显示64个字符。采用串口传输可节省大量单片机的IO口,故系统采用LCD12864作为系统的显示模块。
3 单片机程序设计
系统的单片机程序设计结构如图三所示,为方便系统调试,整体设计思路运用模块化设计方法,每个部分都有相应子程序。
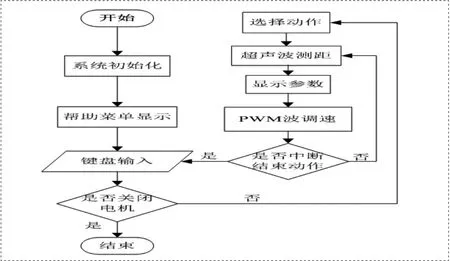
图3 程序设计流程图
3.1超声波测距程序设计
风洞管中小球位置的检测运用的是超声波测距原理。超声波测距程序设计流程如图六,其中 HC-SR04超声波传感器的激励信号由主控单片机的定时器TA1.1产生,设置MSP430单片机的定时器TA0.1为在电平上升沿和下降沿均产生中断的捕获模式,可以分别得到定时器上升沿时的计数值N1和下降沿的计数值N2,结合计数溢出次数N3,可由公式(1)计算出超声波反射回来所用时间T:

其中N为定时器的计数周期数,对于MSP430F5529来说为65536;t为定时器计一次数所用的时间,即单片机定时器所选择的时钟信号频率的倒数,通过公式S=V*T/2 可得到所测距离,其中V为声速。
3.2调速程序设计
风机的调速原理是通过主控板控制输出不同占空比的PWM波,使其加在电机两端的等效电压与PWM波的占空比成比例。PWM波由MSP430F5529单片机中的定时器TA2.1输出,TA2.1工作在增计数模式下的OUTMOD_7复位/置位输出模式,TA2CCR0决定PWM波的周期,TA2CCR1决定PWM波的占空比,据此可以控制输出可控占空比的PWM波。
但重点是输出多大占空比的PWM波可使电机的转速得以精确控制。目前应用比较成熟的控制算法有PID控制、模糊控制、专家控制。但是在现实工程应用中,因各种不确定因素的存在,很难得到系统准确的数学模型,此时选用PID控制是最为简单易行的。
PID控制的原理是根据系统误差,通过公式对比例P、积分I、微分D进行运算,最终得到输出量。比例P能够实现系统的快速响应;积分I可以减小稳态误差;微分D能预测系统误差的变化趋势,进而超前调节。
系统调速程序设计流程图如图七所示,系统利用增量式PID算法进行控制,增量式PID的计算方法如下:

此时的PID三个参数需要通过实验测试确定。
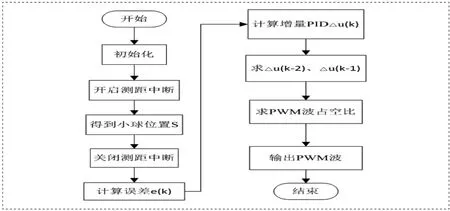
图4 调速程序设计流程图
4 系统测试及结果分析
根据设计方案搭建的实物测试平台,经过系统调试后,PID参数最终选定结果为(8.3,0.28,78)。组成系统后各个模块均可正常工作。用户通过输入模块可以控制小球进行相应的动作,经过完整测试,系统可以控制小球在任意设定位置停留,并且是以较快的速度到达设定位置。当用纸片部分挡住上端出风口时,小球依然可以迅速恢复到指定位置,系统整体表现出较好的鲁棒性、稳定性、快速性。
5 总结
通过对实物平台的测试,系统整体达到了预期的设计指标。本系统对风洞测控系统以及自动控制的基础研究具有一定的参考作用,进一步可以开发更为复杂的测控系统,将对其作更深的研究和探讨。
参考文献
[1]张建强,吉诗杰.简易超声波测距仪的设计与实现[J].仪器仪表用户,2009(05).
[2]张红莲.基于单片机的超声波测距系统的设计[J].可编程控制器与工厂自动化,2008(09).
[3]张新荣,张宇林,周红标,唐中一.数字PID算法在直流电机控制中的应用[J].数字技术与应用,2011(07).
[4]杨巨庆,黄健,段丽华.PID控制技术与应用[J].哈尔滨师范大学自然科学学报,2004(02).
[5]冼凯仪,李先祥.基于PWM控制的直流电机控制系统的设计[J].佛山科学技术学院学报(自然科学版),2000(03).
王敏敏(1995-),男,江西吉安人,现就读于西北大学信息科学与技术学院。
作者简介:
基金项目:国家级大学生创新创业训练计划项目(201510697008)。