基于单片机的智能移动机器人的研究与应用
2016-05-03邵阳学院信息工程系
邵阳学院信息工程系 陈 俊 阳 泳
基于单片机的智能移动机器人的研究与应用
邵阳学院信息工程系陈俊阳泳
【摘要】随着电子技术的快速发展,电子技术被广泛的应用于智能控制领域。单片机以体积小,可靠性高,功能齐全,开发简单等优势快速得到很多电子系统设计者的喜爱。它适合实时控制。本文以AT89C52单片机为核心设计了智能机器人系统,本机器可以沿着黑线行走,可以在光源引导下行走。可以在传感器的探测下,由单片机控制驱动装置运动。
【关键词】单片机;智能机器人系统;传感器
1 方案设计
本设计以AT89C52单片机为核心,利用传感器作为环境探测装置,AT89C52单片机进行处理判断,然后驱动电机进行相应的动作。硬件方案图如图1所示。程序设计使用中断方式对数据进行显示,实现简单,方便快捷。
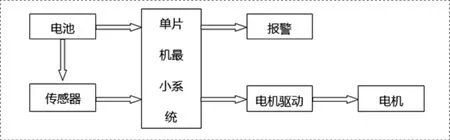
图1 设计方案方框图
2 硬件设计
2.1单片机最小系统
本设计采用AT89C52单片机对多个传感器对外部环境进行探测,使得机器人可以实时做周围的环境形成局部感知,则可以控制驱动装置运动,设计中力求使用最小的元件实现全部功能。该机器人在系统程序控制下,由AT89C52单片机协调各个部分正常运行,选择使用11.0592MHz的晶振,这样波特率为9600理论上没有误差,可以外加蓝牙模块,使用蓝牙模块对机器人进行控制。
2.2电机驱动
电机驱动采用高电压、大电流电机驱动芯片L298N,可以通过单片机输出改变控制端的电平,其驱动二个直流电机。
2.3传感器
传感器使用寻线传感器,避障传感器,光敏传感器,使用两个寻线传感器,有一个传感器检测到则机器人偏离轨迹,将进行相应的操作。避障传感器主要是超声波的原理,使用避障传感器主要是为了避开障碍物。光敏传感器主要是探测光源,使得机器人可以寻找到光源。
3 软件设计
软件设计的主要任务是,让单片机查询检测传感器的信息,根据传感器做出相应的判断,控制直流电机实现自动循迹,自动避障,自动寻找光源等功能。电机的转速采用PWM(脉冲宽度调制)调速原理。程序设计思想采用模块化设计思想,在进行单片机控制的过程中,各个模块程序按照控制对象进行模块化设计,分步调试,把一个系统分为几个子系统,在各个子系统完善后,在进行主程序的设计与调试。
4 结语
移动机器人是一个技术综合性极强的研究领域,在大部分移动机器人可以看到传感器的的存在,在人们的观念中,机器人必须是人形的,其实机器人(Robot)是自动执行工作的机器装置。本文做了一个简单的具有寻线、避障等功能的简易机器人。相信随着电子技术的快速发展,机器人的发展将更加迅速。
参考文献
[1]邓韶斌.基于AVR单片机的智能移动机器人控制系统研究与实现[D].南京航空航天大学,2009.
[2]周华龙,刘新杰,潘芸.智能控制在自主式移动机器人中的应用[J].江苏电器,2008(01).
[3]吕国策.对单片机的控制系统在智能机器人中的应用研究[J].电子制作,2015(04).
[4]米秀杰.单片机应用系统研究——轮式移动机器人控制系统设计与研究[J].制造业自动化,2011(03).
陈俊(1991—),男,湖南泸溪人,大学本科,现就读于邵阳学院信息工程系通信工程专业,研究方向:嵌入式应用系统设计。
阳泳(1994—),男,湖南邵阳人,大学本科,现就读于邵阳学院信息工程系电子信息工程专业,研究方向:嵌入式应用系统设计。
作者简介: