非圆轮系加工番茄果秧分离振动发生器的设计
2016-05-03朱兴亮王丽红坎杂李成松秦金伟
朱兴亮+王丽红+坎杂+李成松+秦金伟

摘要: 为解决现有加工番茄果秧分离装置冲击载荷大、易堵塞等问题,利用非圆轮系设计了加工番茄果秧分离装置振动发生器。分析了加工番茄果秧分离试验高速录像,拟合并修正了果秧分离装置输入输出角位移间函数关系;选用W-W型非圆齿轮轮系设计振动发生器,求取了轮系中非圆齿轮节曲线,并进行了封闭性验证和齿轮中心距圆整,获得了非圆齿轮最终节曲线公式。基于上述研究,设计了非圆轮系加工番茄果秧分离振动发生器,并介绍了其工作原理。该振动发生器具有传动平稳、精确、高效的特点,可满足果秧分离装置平稳连续的运动需求,为加工番茄收获机的设计提供了新方法。
关键词: 加工番茄;果秧分离;W-W非圆轮系;齿轮节曲线;振动发生器
中图分类号: S225.99 文献标志码: A 文章编号:1002-1302(2016)03-0398-03
目前,世界加工番茄种植区主要集中在美国加利福尼亚地区、欧洲地中海地区和中国的新疆、内蒙古地区[1]。美国和欧洲大多实现了番茄收获机械化,中国作为世界番茄的主要产区,机械化收获程度却很低,且国内番茄收获周期短,收获季节气温高,未及时收获易影响番茄品质[1-5]。因此,机械化收获是番茄产业发展的必然趋势。
果秧分离是番茄机械化收获的重要环节之一[5],振动发生器作为其驱动部件,传动效果直接影响番茄收获机工作性能。目前,国内外加工番茄果秧分离振动发生器主要采用偏心块式[1,6-7],利用2个对称偏心块转动产生的对称力偶,带动分离装置转动,但该传动方式导致分离装置在运动过程中产生偏心力偶,易产生机架共振,甚至停止工作[5];此外,存在冲击载荷大、易堵塞等问题[1],且传动过程不可靠,难以实现精确传动,导致分离效果不稳定。非圆齿轮行星轮系可实现变速单向、变速回转等各种复杂特殊的运动[8-13],既能实现凸轮的变速运动,又能实现齿轮精确高效重载的传动,具有牢靠、紧凑、传动平稳等特点[14],广泛运用在高速插秧机、液压马达、纺织机械上[10,12],可用来替换现有机构作为加工番茄果秧分离装置振动发生器。
本研究通过对果秧分离装置输入输出角位移散点图分析,拟合其输入输出角位移关系,获取传动比函数,设计非圆齿轮轮系,旨在满足分离装置运动需求基础上减少装置冲击载荷,实现平稳精确传动,为加工番茄收获机的设计提供新方法。
1 果秧分离装置传动函数的获取
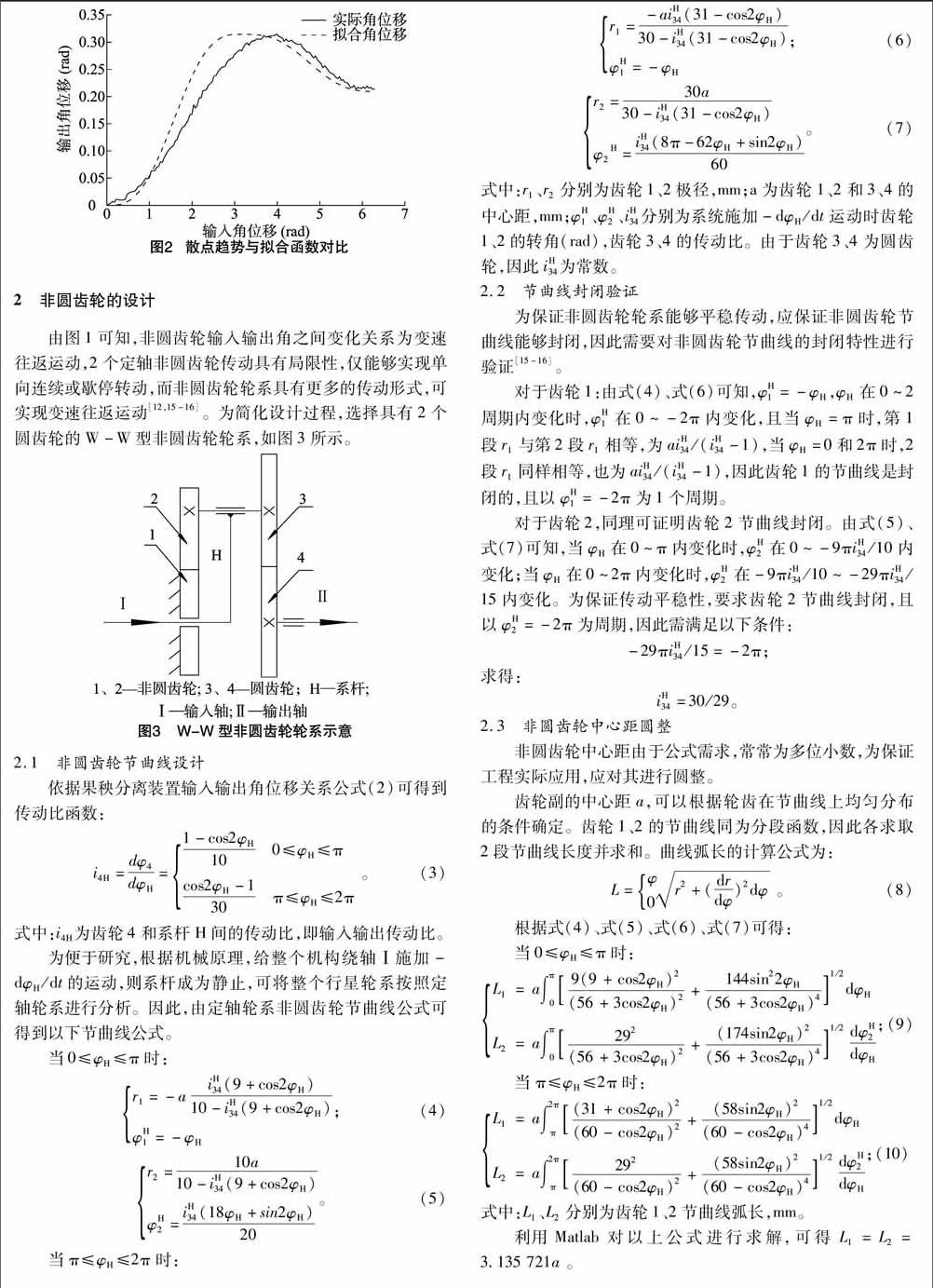
在FS-35型加工番茄果秧分离试验台进行多组试验,获取最优分离率高速录像,分析得到果秧分离装置输入输出角位移散点图(图1)。
通过观察散点图像可知,函数呈周期变化,因此为满足装置工作要求,只需取单一周期进行拟合即可。
由角位移散点图可以看出,角位移函数符合y=ax+bsinωx的变化趋势,且图像在极值点前后有差别,为提高拟合函数精度,需要进行分段拟合,因此利用非线性拟合方式进行自定义分段拟合获得角位移函数:
2 非圆齿轮的设计
由图1可知,非圆齿轮输入输出角之间变化关系为变速往返运动,2个定轴非圆齿轮传动具有局限性,仅能够实现单向连续或歇停转动,而非圆齿轮轮系具有更多的传动形式,可实现变速往返运动[12,15-16]。为简化设计过程,选择具有2个圆齿轮的W-W型非圆齿轮轮系,如图3所示。
2.1 非圆齿轮节曲线设计
依据果秧分离装置输入输出角位移关系公式(2)可得到传动比函数:
为便于研究,根据机械原理,给整个机构绕轴Ⅰ施加-dφH/dt的运动,则系杆成为静止,可将整个行星轮系按照定轴轮系进行分析。因此,由定轴轮系非圆齿轮节曲线公式可得到以下节曲线公式。
2.2 节曲线封闭验证
为保证非圆齿轮轮系能够平稳传动,应保证非圆齿轮节曲线能够封闭,因此需要对非圆齿轮节曲线的封闭特性进行验证[15-16]。
对于齿轮1:由式(4)、式(6)可知,φH1=-φH,φH在0~2周期内变化时,φH1在0~-2π内变化,且当φH=π时,第1段r1与第2段r1相等,为aiH34/(iH34-1),当φH=0和2π时,2段r1同样相等,也为aiH34/(iH34-1),因此齿轮1的节曲线是封闭的,且以φH1=-2π为1个周期。
2.3 非圆齿轮中心距圆整
非圆齿轮中心距由于公式需求,常常为多位小数,为保证工程实际应用,应对其进行圆整。
齿轮副的中心距a,可以根据轮齿在节曲线上均匀分布的条件确定。齿轮1、2的节曲线同为分段函数,因此各求取2段节曲线长度并求和。曲线弧长的计算公式为:
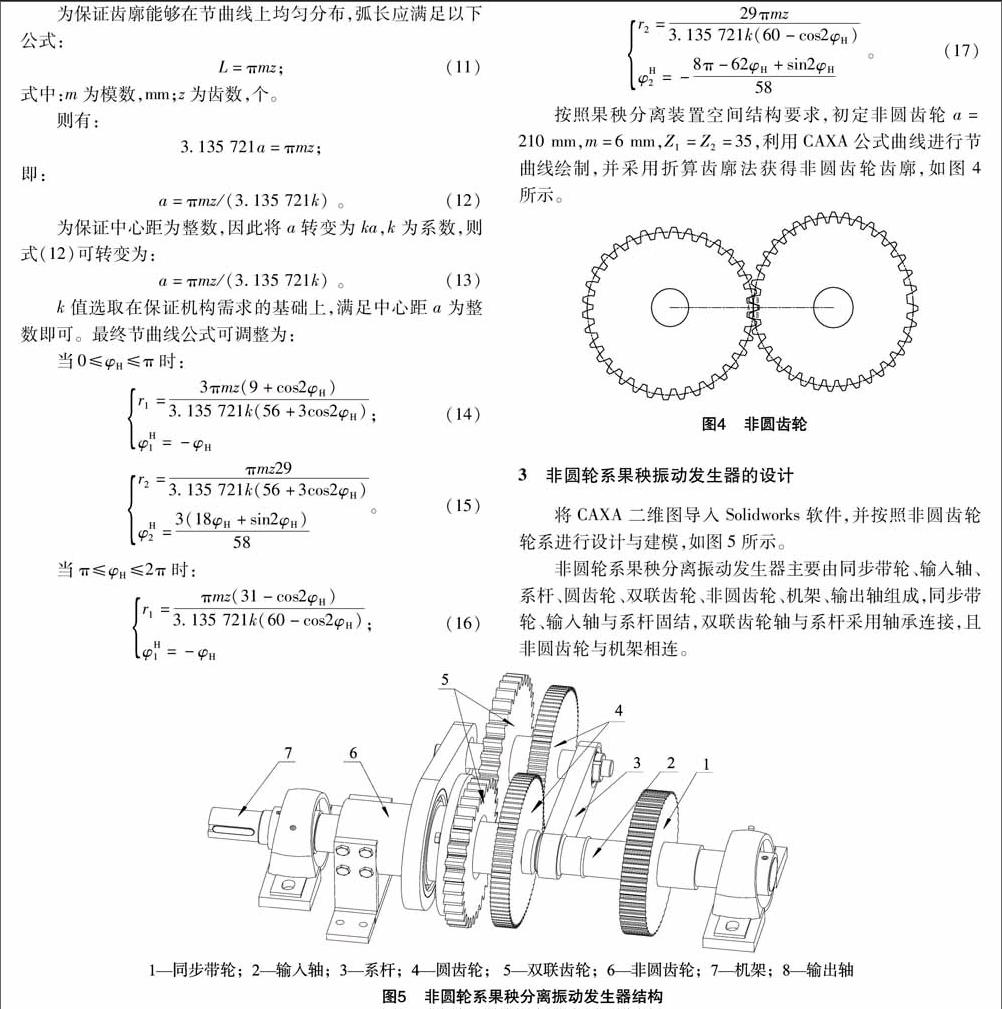
按照果秧分离装置空间结构要求,初定非圆齿轮a=210 mm,m=6 mm,Z1=Z2=35,利用CAXA公式曲线进行节曲线绘制,并采用折算齿廓法获得非圆齿轮齿廓,如图4所示。
3 非圆轮系果秧振动发生器的设计
将CAXA二维图导入Solidworks软件,并按照非圆齿轮轮系进行设计与建模,如图5所示。
非圆轮系果秧分离振动发生器主要由同步带轮、输入轴、系杆、圆齿轮、双联齿轮、非圆齿轮、机架、输出轴组成,同步带轮、输入轴与系杆固结,双联齿轮轴与系杆采用轴承连接,且非圆齿轮与机架相连。
工作时,由同步带轮1驱动输入轴2、系杆3进行匀速转动,通过双联齿轮5中非圆齿轮与非圆齿轮6进行啮合,将匀速运动转变成为双联齿轮的变速变向运动,并经双联齿轮5中圆齿轮与圆齿轮4的啮合传递至输出轴,实现果秧分离振动发生器变速变向的运动要求。
4 结论
本研究分析了加工番茄果秧分离装置角位移数据,分段拟合出输入输出角位移函数,并依据非圆齿轮设计需求进行修正,确定加工番茄输入输出角位移间关系;确定W-W型非圆轮系,并依据角位移函数对轮系进行设计,对节曲线公式进行封闭性验证,并对中心距进行了圆整;设计了非圆轮系果秧分离振动发生器,并介绍了其工作原理。
参考文献:
[1]朱兴亮,李成松,坎 杂,等. 加工番茄果秧分离技术发展现状分析[J]. 河北科技大学学报,2013,34(5):399-402.
[2]庞胜群,王祯丽,张 润,等. 新疆加工番茄产业现状及发展前景[J]. 中国蔬菜,2005(2):39-41.
[3]梁勤安,余庆辉,冯 斌,等. 新疆加工番茄机械化收获发展对策的研究[J]. 新疆农业科学,2007,44(2):225-230.
[4]徐声彪. 以机械化促进加工番茄产业化[J]. 新疆农机化,2008(4):34-35.
[5]谭洪洋,李成松,坎 杂,等. 加工番茄果秧分离装置的设计及仿真[J]. 农机化研究,2012,34(1):84-87.
[6]肖彬彬. 回转滚筒式加工番茄果秧分离装置的研究[D]. 石河子:石河子大学,2013.
[7]梁荣庆. 加工番茄果秧分离装置液压振动系统设计研究[D]. 石河子:石河子大学,2013.
[8]Takahara T,Takami A. Angular velocity modulating device:US,4994718[P]. 1990-07-31.
[9]Katori H. Planetary gear having non-circular gears:US,4788891 [P].1988-12 -06.
[10]俞高红,张玮炜,孙 良,等. 偏心齿轮-非圆齿轮行星轮系在后插旋转式分插机构中的应用[J]. 农业工程学报,2011,27(4):100-105.
[11]Chen D J. A study on the rearward separate-planting mechanism of rice transplanter[J]. Journal of Jinhua College of Profession and Technology,2001,1(4):1-3.
[12]魏秦文,冯 斌,马志新,等. 非圆齿轮行星差速机构运动特性仿真分析[J]. 机械工程师,2009(1):133-135.
[13]和 丽,许纪倩,周 娜,等. 非圆齿轮行星轮系分插机构运动分析[J]. 农业机械学报,2007,38(12):74-77.
[14]苑明杰. 非圆齿轮参数化设计关键技术研究[D]. 兰州:兰州理工大学,2013.
[15]姚文席. 非圆齿轮设计[M]. 北京:机械工业出版社,2013.
[16]吴序堂,王贵海. 非圆齿轮及非匀速传动比[M]. 北京:机械工业出版社,1997.
