躯干负重对步态的影响及相应补偿策略的试验研究
2016-05-02赵功赫万祥林
赵功赫,曲 峰,杨 辰,万祥林,刘 欢
●专题研究 Special Lecture
躯干负重对步态的影响及相应补偿策略的试验研究
赵功赫,曲 峰,杨 辰,万祥林,刘 欢
目的:研究躯干负重时的步态特征及相应补偿策略,探讨躯干不同负重重量对步态的影响,为负重方式的选择、负重装备的改进或仿人机器人的设计提供参考。方法:选用10名普通男性大学生为受试者,佩戴特制的可控制负重物重心位置的负重架,将负重物前后均匀安放,进行3种负重状态(负重物重量分别为0 kg,20 kg,40 kg)下的行走,采用Kistler三维测力台、Motion红外高速运动捕捉系统同步采集运动学、动力学数据。结果:行走中躯干负重重量的增加,显著增加了步宽、支撑相百分比、膝关节屈曲角度、踝关节和膝关节力矩、下肢各关节功率和功(P<0.05),显著减小了步长、重心的上下摆动幅度、躯干的旋转幅度(P<0.05)。结论:人体通过减小步长、增加步宽、增加支撑相百分比、降低重心在上下方向摆动幅度、增大踝、膝关节力矩及膝关节屈曲角度来补偿躯干负重增加对人体步行中平衡控制的影响;躯干前后均匀负重,限制躯干的旋转,影响人体迈步的平衡;在仿人机器人的步态规划的设计中,当躯干负重增加时,应适当调整相应参数,增大驱动力,满足更多能耗。
负重;步态参数;躯干;补偿策略
负重行走在日常生活中非常常见,如上班上学、登山训练、物品搬运、士兵负重行军等各个方面。而外部负重物作用于人体,改变了身体和重物的总质心的位置,人体会相应地调整步态和身体姿势,从而保持身体平衡[1]。长期负重行走,容易导致下肢应力性骨折、下肢关节疼痛和背部肌肉拉伤、腰间盘突出等损伤[2-4]。对不同负重方式和负重范围的研究,可以更深入认识负重引起的人体的生物力学的改变以及相应的稳定控制特征,对负重装备的改进具有重要意义,进而减少损伤[5-8]。
人们徒步出行、士兵负重行军等,通常都会将负重物背负于背部,负重物的重心均在人体外。另外国内、外有关负重行走的研究中,负重物的重心也多在人体外[9-12],但是如果将负重物均匀放在躯干的前后,这样负重物的重心就在身体内,更靠近身体的重心,因而就会减小身体和重物的总质心的变化,这会不会对人体行走更有利呢?近年,双足步行机器人涌现,其步态就是以人类的步态为原型来设计,故人类的稳定控制特征是研究双足步行机器人的一个重要依据,因此探明不同负重状态下行走的动作稳定控制特征及机理,将有助于仿人机器人的设计。
在这种躯干前后均匀负重的方式下步行,步态势必会做出相应的调整,来保持行走的平衡和稳定。为此,本研究特制了负重架,一方面实现对负重物重心的控制,另一方面模拟飞行器相对于机器人的质量分布,以此更有针对性地进行负重研究。本研究旨在对躯干负重下的步态特征进行生物力学分析,用可靠地运动学、动力学参数来分析躯干和下肢的关节力学行为,一方面对优化机器人的步态规划、完善仿人机器人的设计和控制提供依据,另一方面对日常负重方式的选择以及负重装备的改进等具有重要意义。
1 研究对象与方法
1.1 受试者
10名青年男性大学生(年龄:(22.8±1.9)岁;身高:(175.3± 3.1)cm;体重:(66.2±6.4)kg),均习惯穿欧码42的鞋,实验前24 h内未从事剧烈活动,下肢及足部半年内无明显损伤。
1.2 试验仪器
本研究设计特殊的负重架(见图1),自重9.5 kg,可将其佩戴在身上,前面的扶手固定上臂的运动,前后凸出的横杠可固定杠铃片,并实现将负重物平均分配于躯干前后,该负重装置可以控制负重物的重心仅在前后横杆的连线上移动,当负重物平均分配于躯干前后时,则负重物的重心就在前后横杆连线的中点。该负重架同时也模拟出了飞行器相对于机器人的质量分布。
采用8镜头红外高速运动捕捉系统(Motion Analysis Raptor-4,USA,200 Hz)、三维测力台(Kistler 9281CA,Switzerland,1 000 Hz)同步采集步行中的运动学、动力学数据。通过便携式测速系统(NewtestPowertimer,Finland)监控步行速度,两个测速仪红外发射装置置于测力台一侧,二者间距3 m。

图1 负重架Figure1 Loading device used in the experiment
1.3 试验步骤
受试者着紧身衣并佩戴泳帽,穿统一运动鞋,身上共贴29个反光点(头顶点,头前/后点,右侧肩胛骨偏移点,第四、五腰椎之间,两侧肩峰点,两侧肱骨外上髁,两侧尺骨茎突和桡骨茎突中点,两侧大腿前侧,两侧股骨外上髁,两侧股骨内上髁,两侧胫骨粗隆,两侧内踝,两侧外踝,两侧足尖和足跟)。
测试时,受试者佩戴负重架,双手约束在前部扶手上,在距测力台约10 m处准备,听到口令后受试者在规定速度下((1.5± 0.2)m/s)自然走过测试区域(见图2)。负重重量分别为0 kg(仅佩戴负重架)、20 kg(负重架前后各固定10 kg杠铃片)、40 kg(负重架前后各固定20 kg杠铃片)。在规定速度下,受试者以正常步态、无任何步伐调整并以左脚着在台面上视为一次有效测试,每种负重重量下采集3次有效数据,负重重量随机安排。为避免疲劳因素对实验结果产生影响,要求受试者每次行走之间充分休息。

图2 负重行走测试示意图Figure2 Walking with weight-bearing
1.4 数据处理
采集的所有标志点三维坐标采用Butterworth低通滤波法进行平滑,截断频率为10 Hz。根据标志点建立躯干坐标系、骨盆坐标系、大腿坐标系、小腿坐标系、足坐标系[13],其中踝关节转动中心为内外踝的中点,膝关节转动中心为股骨内外上髁中点,髋关节转动中心根据BELL等[14]的研究计算获得。躯干角度定义为躯干坐标系和大地坐标系之间欧拉角,髋关节角度定义为大腿坐标系和骨盆坐标系之间的欧拉角,膝关节角度定义为小腿坐标系和大腿坐标系之间的欧拉角,踝关节角度定义为足坐标系和小腿坐标系之间的欧拉角,采用逆动力学的方法[15]计算下肢关节的三维力矩,计算人体重心,其中人体惯性参数采用DELEVA[16]修正后的Zatsiorsky-Seluyanovs人体惯性参数。关节功率为关节力矩与关节角速度的乘积,采用梯形法计算关节功率对时间积分获得关节功。对于下肢关节运动学、动力学参数,本文仅分析人体矢状面数据,对下肢动力学参数除以体重进行标准化处理,并对各指标按一个步态周期(左足跟着地到左足跟再次着地)进行标准化处理。
数据用Cortex2.1.0.1103以及Microsoft Office Excel 2007、MATLAB R2009a等软件进行计算处理。
1.5 统计分析
采用重复测量单因素方差分析比较躯干负重重量对步态参数的影响,后续采用LSD检验方法进行两两比较,以P<0.05作为差异显著性水平,所有数据应用SPSS17.0软件分析。
2 研究结果
2.1 时空参数
不同负重重量行走时步态时空参数结果如表1所示,40 kg负重行走时步长显著小于0 kg、20 kg负重(P<0.05),步频显著大于0 kg、20 kg负重(P<0.05)。步长、步宽在不同负重重量间均有显著差异(P<0.05),步长随着负重重量的增加而减小,步宽随着负重重量的增加而增大。支撑相、摆动相百分比在不同负重重量间均有显著差异(P<0.05),支撑相百分比随着负重重量的增加而增大,摆动相百分比随着负重重量的增加而减小。
2.2 重心运动特征
不同负重重量行走,重心的左右摆动幅度无显著性差异(P>0.05),而上下摆动幅度随着重量的增加显著减小(P<0.05)(见表2)。

表1 不同负重重量行走时步态时空参数比较(n=10)Table1 Gait parameters during walking under different loading conditions(n=10)

表2 不同负重重量行走时重心摆动幅度(n=10)Table2 The amplitude of swing of COM during walking under different loading conditions(n=10)
2.3 躯干运动特征
负重重量对于躯干的左右倾和前后倾无显著影响(P>0.05),仅躯干前后倾幅度有显著差异,40 kg、20 kg负重行走时,该指标较0 kg负重行走显著增大(P<0.05)。而对躯干旋转却影响显著(P<0.05),躯干内旋最大值、最小值、旋转幅度在不同负重重量间均有显著差异(P<0.05),均随着负重重量的增加而减小(见表3)。
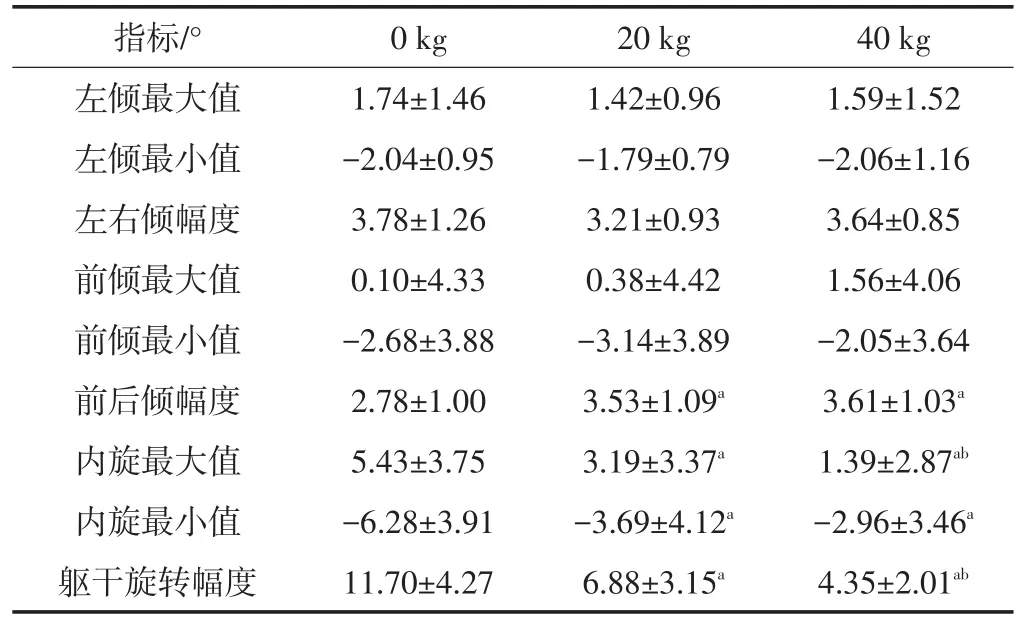
表3 不同负重重量行走时躯干各参数(n=10)Table3 The angular movement of trunk during walking under different loading conditions(n=10)
2.4 下肢运动学、动力学参数
不同负重重量行走时踝关节在矢状面的运动学、动力学参数结果(见表4)表明,40 kg、20 kg负重行走时,力矩最大值(最大跖屈力矩)、功率最大值、功率最小值、正功均显著大于0 kg负重(P<0.05),40 kg负重与20 kg负重行走相比,上述各指标均显著增大(P<0.05),但不同负重重量下踝关节的角度最小值(踝最大跖屈角度)、角度最大值(最大背屈角度)和矢状面活动幅度均无显著差异(P>0.05)。
不同负重重量行走时踝关节在一个步态周期内的矢状面角度、力矩、功率变化曲线如图3所示。
不同负重重量行走时膝关节在矢状面的运动学、动力学参数结果(见表5)表明,随着负重重量的增加,支撑相角度最大值(支撑相膝最大屈角)、摆动相角度最大值(摆动相膝最大屈角)、力矩最大值(最大伸膝力矩)、功率最大值、功率最小值、正功、负功均显著增大(P<0.05)。但随着负重重量的增加,膝关节的活动幅度无显著变化(P>0.05)。
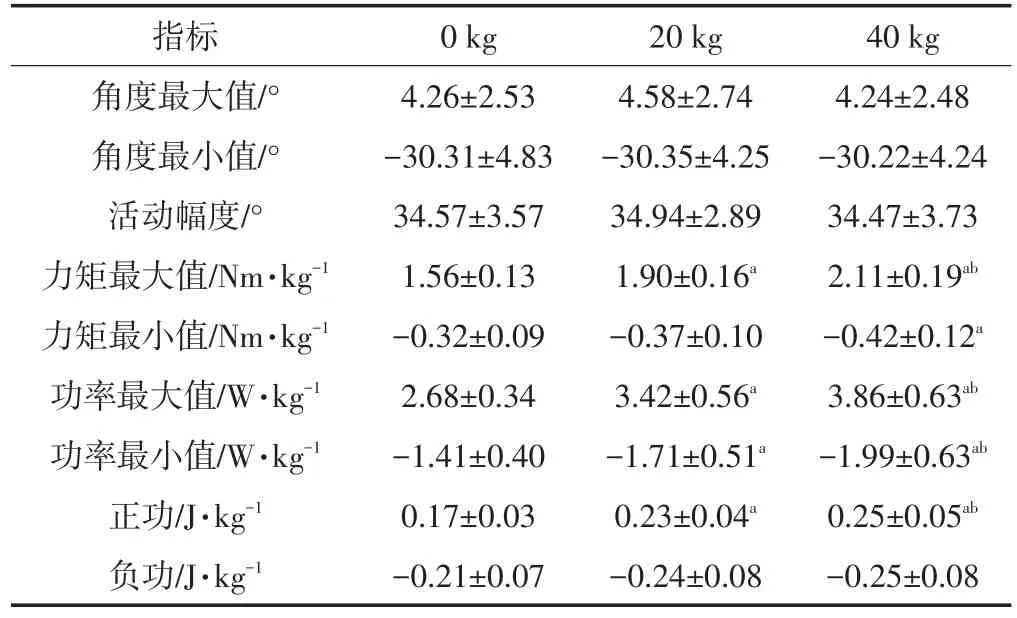
表4 不同负重重量行走时踝关节矢状面各参数(n=10)Table4 Sagittal plane parameters for the ankle during walking under different loading conditions(n=10)
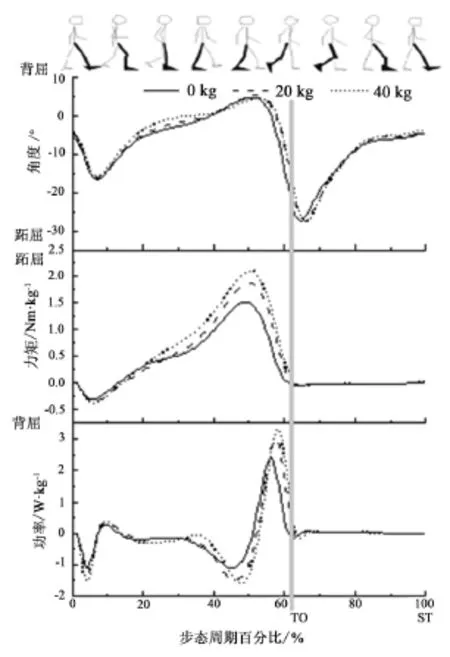
图3 不同负重重量行走的步态周期中踝关节矢状面角度、力矩、功率(n=10)Figure3 Sagittal plane angles,moments and powers for the ankle during walking under different loading conditions(TO=toe off,ST= foot strike)(n=10)注:TO为脚离地,ST为脚着地(下同)。
不同负重重量行走时膝关节在一个步态周期内的矢状面角度、力矩、功率变化曲线见图4。
不同负重重量行走时髋关节在矢状面的运动学、动力学参数结果(见表6)表明,40 kg负重行走时,角度最大值(最大屈髋角度)显著大于0 kg、20 kg负重行走(P<0.05),而0 kg与20 kg负重行走之间没有显著差异(P>0.05)。40 kg、20 kg负重行走时,功率最大值、功率最小值、正功、负功显著大于0 kg负重(P<0.05),而40 kg与20 kg负重行走之间没有差异。不同负重重量下髋关节力矩没有差异(P>0.05)。
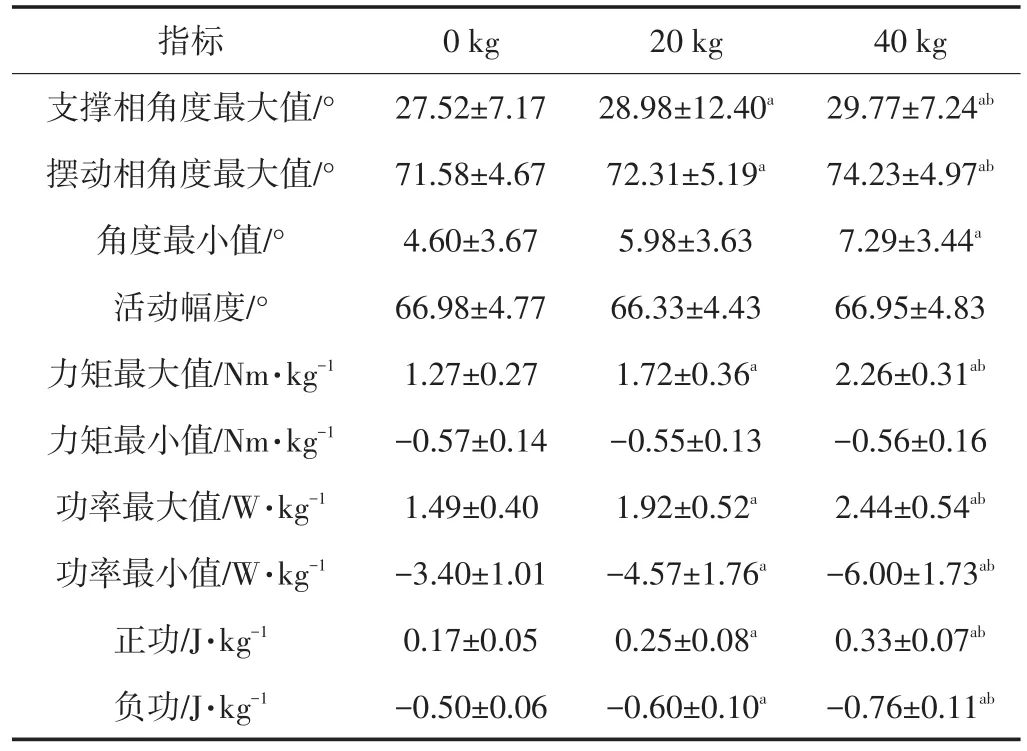
表5 不同负重重量行走时膝关节矢状面各参数(n=10)Table5 Sagittal plane parameters for the ankle during walking under different loading conditions(n=10)

图4 不同负重重量行走的步态周期中膝关节矢状面角度、力矩、功率(n=10)Figure4 Sagittal plane angles,moments and powers for the knee during walking under different loading conditions(TO=toe off,ST= foot strike)(n=10)
不同负重重量行走时髋关节在一个步态周期内的矢状面角度、力矩、功率变化曲线见图5。
3 讨论
3.1 时空参数
在本实验中,躯干随着负重重量的增加,步长显著减小,步宽显著增大。这种步长和步宽的显著性变化,主要是为了增加行走过程中的稳定性。由于躯干负重重量的增大,支撑腿需要更大的工作能力以推动整个身体质量运动(自身重量和负重重量之和),这就增加了肌肉的工作负荷,身体的稳定性也降低,而摆动腿此时没有负重,因此摆动腿前摆比较容易,所以受试者为了保持固定的行走速度,摆动腿迅速前摆着地,这就导致了步长相应地缩短。这与MARTIN等[17]的研究结果基本一致,即负重重量的增加会造成步长的减小,ATTWELLS等[18]通过实验证实,较高的载荷会使步长减小,这与本研究结果基本相同。而这与武明等[9]的研究结果的并不一致,原因是由于其实验中并未对受试者的步速进行控制。20 kg、40 kg与0 kg负重相比,步宽分别增加了13.21%、23.15%,有文献指出,步宽会随着负重的增加而增加,因为步宽增大,支撑面积增大,行走的稳定性随之增大,这与本实验的研究结果相同。DONELAN等[19]认为,步宽变化率的增大会增加每一步之间转换所需要的能量,而积极的稳定需要适度的代谢成本,更大的步宽意味着有更大的能量消耗。可见,步长和步宽的这种变化,是受试者保持行走稳定性的一种措施。

表6 不同负重重量行走时髋关节矢状面各参数(n=10)Table6 Sagittal plane parameters for the ankle during walking under different loading conditions(n=10)

图5 不同负重重量行走的步态周期中髋关节矢状面角度、力矩、功率(n=10)Figure5 Sagittal plane angles,moments and powers for the hip during walking under different loading conditions(TO=toe off,ST= foot strike)(n=10)
有研究表明,采用自选频率或适宜频率进行运动可使运动能耗最小化,这将有利于周期性运动的能量节省。本实验中,大负重重量(40 kg负重)使得受试者步频明显改变,说明在此情况下受试者的步频保持能力较差,这对于节省能量消耗时非常不利的,负重的增加会破坏正常的步频。本研究中,受试者在负重逐渐增加的情况下,为了保持固定的行走速度,通过步长的减小和步宽的增加来提高行走的稳定性,从而补偿躯干负重对人体平衡控制的影响。提示在进行机器人的步态规划时,随着躯干负重重量的增加,应适当增加步宽、减小步长,步频应该尽量保持已达到能量的节省化,同时加大驱动力,满足更多的能量消耗。
摆动相百分比随着躯干负重重量的增加而显著减小,支撑相百分比随着躯干负重重量的增加而显著增大,20 kg、40 kg与0 kg负重相比,支撑相百分比分别增加了2.22%和3.29%。这与CHARTERIS[20]的研究结果相同。这是因为摆动相的稳定性不如支撑相,故随着负重重量的增加人体势必会利用更多的支撑相来维持稳定,而在摆动期,摆动腿加速摆动着地,减小摆动相,使人体加快形成一个动态的平衡体系。因此在机器人仿真研发中,随着躯干负重的增加,支撑相百分比应该相应增加而摆动相百分比相应减小。
3.2 重心运动特征
在本实验中,随着躯干负重重量的增加,重心上下摆动的幅度显著减小,但对重心的左右摆动幅度没有显著影响,说明负重增加,并未造成重心在左右方向的过度摆动,但是负重增加,会减少步行中重心在上下方向的摆动幅度,有助于增加步态的稳定性。
3.3 躯干运动特征
随着负重的增加,躯干的前后倾和左右倾均没有明显变化,这一结果与邹晓峰[21]的研究结果不一致,原因是邹晓峰[21]实验中对受试者进行的是背部负重,而背部负重,身体和重物的总质心会向后上方偏移,因此躯干通过前倾调整总质心的位置,负重重量越大,躯干前倾角度越大,而本实验采用了特制的负重架,将负重物均匀分配在躯干前后,负重物的质心就在前后横杆连线的中点处,即负重物的总质心的位置在躯干内,而不是在躯干外,躯干负重后,身体和重物的总质心会向上方偏移,而不会向后方偏移,从而使躯干的前倾不会随着负重重量的增加而增大。KINOSHITA[22]就不同负重方式对行走步态的影响的研究发现,背部背包造成躯干更大的前倾,而躯干前后均匀负重可以大大减少不必要的前倾,并且更接近于正常行走。黄强民等[2]研究躯干在不同位置下负重时的肌电活动发现,外部负重物的位置对躯干稳定性影响较大,尤其当负重物在躯干前时,身体处于后伸位,腰部闪动次数会增多,更容易造成下腰痛的发生。
躯干不同负重重量对躯干运动特征影响最为明显的是躯干的旋转,躯干负重的增加,会明显限制躯干的旋转。20 kg、40 kg与0 kg负重相比,躯干内旋最大值分别减小了41.25%、74.40%,躯干内旋最小值分别减小了41.24%、52.87%,躯干旋转幅度分别减小了58.80%、62.82%。KUBO等[23]、BRUIJN等[24]研究认为,上肢是身体上半部分角动量和扭矩的主要贡献来源,下肢是身体下半部分角动量和扭矩的主要贡献来源,身体上下两部分的角动量和扭矩需要相互平衡以维持身体水平方向上旋转的平衡。而本研究中,因为将手臂约束在了负重架的前部扶手上,限制了手臂的摆动,因此躯干的旋转成为身体上半部分角动量和扭矩的主要贡献来源,来平衡下肢摆动产生的角动量和扭矩。当躯干负重增加时,躯干的旋转幅度明显减少,这时身体上半部分的角动量和扭矩随之明显变小,而下肢则通过减小摆动幅度,步幅也随之减小,从而减少角动量和扭矩来与身体上半部分平衡。故躯干的旋转主要是配合下肢的摆动进入下一个支撑面,也正是躯干的旋转和下肢的配合,为身体平滑地向前行进提供了一种平衡的作用,如果限制了躯干的旋转,势必会限制下肢的迈步,从而影响到整体迈步的平衡。
躯干负重重量的增加,减小了躯干旋转幅度,同时身体和重物的总质心会也向上方偏移,这均加剧了平衡控制的难度,人体必然会增加躯干周围肌肉的能量消耗来保持步行中的平衡。这也提醒我们,在进行躯干负重两足步行拟人机器人的步态规划时,应当对躯干的运动特征进行相应调整。
3.4 下肢运动学、动力学参数
在本实验中,随着躯干负重重量的增加,踝关节的角度变化较小,膝关节的屈曲角度的两个峰值均增大,髋关节的最大屈曲角度增大,这与武明等[9]的研究结果基本一致,说明躯干负重重量增加后,人体主要通过调整髋、膝关节角度来适应变化,而踝关节的贡献相对较小。下肢关节角度随着躯干负重增加所进行的这些调整,主要是为了保持身体的质心不受较大负荷的影响,从而保持人体行走过程中的平衡和稳定。
关节净力矩是肌肉作用效果的等效,肌力矩所做的功将影响系统的机械能,当关节净力矩与关节角速度方向相同时关节功率为正值,肌肉向心收缩做正功,意味着能量被肌肉产生出来并向肢体传递;当关节净力矩与关节角速度方向相反时关节功率为负值,肌肉离心收缩做负功,这时外力对肌肉所做的功为总功,意味着能量由肢体环节流向肌肉,被肌肉吸收。行走时负功主要使肢体在抵抗重力时吸收能量,正功使人体向前运动,不管是正功还是负功,肌肉收缩都要消耗能量。躯干负重的增加,虽然对踝关节的角度影响不大,但是踝关节跖屈力矩和正功均明显增大,在支撑相后期离地蹬伸时,踝关节跖屈肌群更加用力,产生更多的能量推进运动。
膝关节的屈曲角度的第一个峰值位于支撑相的足着地缓冲期(20%步态周期附近),随着负重的增加,屈曲角度显著增大,这是因为在着地缓冲期,膝关节更加屈曲,以便更好的进行下肢缓冲,防止着地时刻过大的冲击力对下肢造成损伤。而此时,外部力矩要让膝关节屈曲的时候,膝关节内部产生一个很大的伸膝力矩,与关节角速度方向相反,膝关节周围肌肉做负功吸收能量,膝关节的最大伸膝力矩也是随着负重的增加而显著增大,20 kg、40 kg与0 kg负重相比,分别增加了35.43%、77.95%,膝功率在此时期为负值,伸膝肌群离心收缩做的负功也显著增大。在整个步态周期中,膝关节的负功也明显大于正功,因此,膝关节在躯干的负重行走中主要起缓冲和控制的作用。韩亚丽等[25]的研究表明,膝关节在平地行走中功率为负值,主要起被动作用。可见躯干负重的增加对膝关节产生了明显的影响,这也是膝关节对躯干负重增加的一种适应性反应。这就提醒在负重机器人的研发中,当负重重量增加时,应注意膝关节处的缓冲设计,加大膝关节的屈曲角度,使其能够充分缓冲。
躯干大负重重量(40 kg负重)时,髋关节最大屈曲角度显著增大,髋关节最大屈曲角度出现在摆动后期(90%步态周期附近)。在支撑相初期,髋关节力矩为伸髋力矩,伸髋肌群向心收缩做正功,推动腿部前进进入摆动相,而在支撑相后期变为屈髋力矩,屈髋肌群离心收缩做负功,是为了使腿部减速并完成足离地,但本研究中,躯干负重重量的增加对于髋关节的力矩没有显著影响,但是造成髋关节功率、正功和负功均增大,意味着髋关节周围肌群更大收缩,消耗更多的能量。因此我们在负重机器人的设计中,随着负重的增加,需要适度增大机器人下肢在摆动期髋关节屈曲角度,以保持平衡,同时应加大下肢的驱动力,满足更多的能量消耗。
4 结语
(1)为了有效补偿躯干负重增加对人体步行中平衡控制的影响,人体通过减小步长,增加步宽,同时增加支撑相百分比,降低重心在上下方向的摆动幅度,增加踝、膝关节力矩来进行补偿,从而保持行走的稳定性。为了减少由于躯干负重的增加所造成的冲击力对关节的损伤,人体在支撑相,主要通过增大膝关节的屈曲角度,来有效地吸收冲击。
(2)躯干的前后均匀负重,虽然对躯干前后倾影响不大,但随着负重重量的增加,会显著抑制躯干的旋转,从而影响到人体迈步的平衡。
(3)在进行躯干前后均匀负重机器人的步态规划中,比如佩戴飞行器的机器人,当躯干负重增加,应减小步长,增加步宽,延长支撑相,减小躯干的旋转,从而增加稳定性,同时应加大下肢的驱动力,满足更多能耗。
[1]宋丽华,陈民盛.人体负重行走的生物力学研究及前景[J].中国组织工程研究与临床康复,2011,41:7771-777.
[2]黄强民,王凤湖,范帅.静态姿势下均匀负重和非负重时躯干和表面肌电活动[J].医用生物力学,2012(4):369-374.
[3]付茂柱.新兵基础训练中下肢应力性骨折的防治对策探讨[J].海军医学杂志,2007(3):237-238.
[4]李壮志,陈玉娟,李立,等.不同载荷书包对小学生身体姿势及足底压力的影响[J].中国学校卫生,2015(2):174-176.
[5]WATANABE K,WANGY.Influence of backpack load and gait speed on plantar forces during walking.[J].Research in Sports Medicine An Inter⁃national Journal,2013,21(4):395-401.
[6]吴剑,李建设.人体行走时步态的生物力学研究进展[J].中国运动医学杂志,2002(3):305-307.
[7]赵美雅,倪义坤,田山,等.行走过程中不同背包负重方式对人体生理参数的影响[J].医用生物力学,2015,30(01):8-13.
[8]周有礼,周伯禧,游家源,等.妊娠妇女步态的动力学分析[J].医用生物力学,2001(2):65-69.
[9]武明.人体背部负重对于步态特征的影响及相应补偿策略的实验研究[J].生物医学工程学杂志,2003,20(4)∶574-579.
[10]DEEPTI MAJUMDAR,MADHU SUDAN PAL,DHURJATI MAJUM⁃DAR.Effects of military load carriage on kinematics of gait[J].Ergonom⁃ics,2010,53(6):782-791.
[11]LAFIANDRA M,WAGENAAR R C,HOLT K G,etal.How do load car⁃riage and walking speed influence trunk coordination and stride param⁃eters?[J].Journal of Biomechanics,2003,36(1):87-95.
[12]WATSON J C,PAYNE R C,CHAMBERLAIN A T,et al.The energetic costs of load-carrying and the evolution of bipedalism[J].Journal of Hu⁃man Evolution,2008,54(5):675-683.
[13]KADABA MP,RAMAKRISHNAN H K,WOOTTEN M E.Measure⁃ment of lower extremity kinematics during level walking[J].J Orthop Res,1990,8(3):383-392.
[14]BELL A L,BRAND R A,PEDERSEN D R.Prediction of hip joint cen⁃tre location from external landmarks[J].Human Movement Science,1989,8(1):3-16.
[15]FRANKEL B,BRESLERJ P.The forces and moments in the leg during level walking[J].Journal of Applied Mechanics,1950,72:26-27.
[16]DE L P.Adjustments to Zatsiorsky-Seluyanov's segment inertia parame⁃ters[J].J Biomech,1996,29(9):1223-1230.
[17]MARTIN P E,NELSON R C.The effect of carried loads on the walking patterns of men and women[J].Ergonomics,1986,29(10):1191-1202.
[18]ATTWELLS R L,BIRRELL S A,HOOPER R H,et al.Influence of car⁃rying heavy loads on soldiers'posture,movements and gait[J].Ergonom⁃ics,2006,49(14):1527-1537.
[19]DONELAN J M,SHIPMAN D W,KRAM R,et al.Mechanical and meta⁃bolic requirements for active lateral stabilization in human walking[J].J Biomech,2004,37(6):827-835.
[20]CHARTERIS J.Comparison of the effects of backpack loading and of walking speed on foot-floor contact patterns[J].Ergonomics,1998,41(12):1792-1809.
[21]邹晓峰.士兵在负重行军时步态的生物力学特征[D].北京:北京体育大学,2010.
[22]Kinoshita H.Effects of different loads and carrying systems on selected biomechanical parametersdescribing walking gait[J].Ergonomics,1985,28(9):1347-1362.
[23]KUBO M,HOLT K G,SALTZMAN E,et al.Changes in axial stiffness of the trunk as a function of walking speed[J].Journal of biomechanics,2006,39(4):750-757.
[24]BRUIJN S M,MEIJER O G,VAN DIEEN J H,etal.Coordination of leg swing,thorax rotations,and pelvis rotations during gait:the organisa⁃tion of total body angular momentum[J].Gait&posture,2008,27(3):455-462.
[25]韩亚丽,王兴松.人体行走下肢生物力学研究[J].中国科学:技术科学,2011(5):592-601.
The Effects of Increasing Loading upon the Trunk on the Gait and Corresponding Compensatory Strategy
ZHAO Gonghe,QU Feng,YANG Chen,WAN Xianglin,LIU Huan
(Dept.of Sports Biomechanics,Beijing Sport University,Beijing 100084,China)
Objective:The purpose of this study was to insight into the effects of increasing loading on human walking and to provide the basis for the choice of loading conditions,the improvement of loading equipment and the design of robots.Methods:A special loading device was made for the experiment to control the COM of the loading on the human posture.Ten male college students completed walking with 0kg,20kg,and 40kg respectively.Results:The increasing loading significantly increased step width,the stance phase proportion,knee flexion angle,ankle and knee moment and the ankle,knee and hip power,and work(P<0.05),and decreased significantly step length,the vertical range of COM and the range of trunk rotation(P<0.05).Conclusions:With the increasing loading on the trunk,the human body increase step width,stance phase proportion,knee flexion angle,ankle and knee moment,and decrease step width,the vertical range of the COM to keep balance.During the design of the gait planning of humanoid robot,the gait parameters need readjusting and lower limb driving force needs increasing.
loading;gait characteristic;trunk;compensatory strategy
G 804.6
A
1005-0000(2016)06-524-06
10.13297/j.cnki.issn1005-0000.2016.06.012
2016-09-30;
2016-11-14;录用日期:2016-11-15
国家高技术研究发展计划(项目编号:2014AA8093024E)
赵功赫(1993-),男,河南济源人,在读硕士研究生,研究方向为运动生物力学;通信作者:曲 峰(1962-),女,山东莱州人,教授,研究方向为运动生物力学。
北京体育大学运动人体科学学院,北京100084。