计及平台运动响应谱的顶部张紧立管稳定性曲线研究
2016-04-25孙丽萍王建伟戴绍仕
孙丽萍,王建伟,戴绍仕
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
计及平台运动响应谱的顶部张紧立管稳定性曲线研究
孙丽萍,王建伟,戴绍仕
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
摘要:针对顶部张紧立管在不规则波作用下可能会失稳的问题,研究了计及平台运动响应谱的张紧立管稳定性曲线。首先计算出了张力腿平台的运动响应谱,依据该运动响应谱的特性,将不规则波波浪作用下张力腿平台的运动响应以一系列规则波叠加的形式给出。并将这一系列的规则波输入到顶部张紧立管的参激振动方程当中。同时,采用伽辽金法简化控制方程,得到参激振动的马蒂厄方程。最后,利用小参数法对其进行推导,得出了顶部张紧立管的稳定性曲线公式。研究结果表明:平台运动响应谱对顶部张紧立管的稳定性曲线有着很重要的影响。
关键词:不规则波;响应谱;张紧立管;马蒂厄方程;稳定性曲线
随着浅水处的油气逐渐被耗尽,对深水域的开发变得特别的重要。立管起着连接平台和海底井口的作用。立管作为连接海面与海底的一种通道,是现代海洋工程结构系统中的重要组成部分,同时也是薄弱易损的构件之一。立管有很多的技术难题,尤其像超水深立管,它们主要应用在恶劣的海况条件下[1]。超深水立管有很复杂的动力特征。当参数激励共振发生时,立管会由于过大压力或发生明显疲劳时,导致石油汽溢出并引发环境的污染和巨大的经济损失[2-3]。最近,研究主要集中于海洋结构的参数激励的不稳定性,例如船的横摇参数激励和spar平台、张力腿的筋腱和立管的参数激励[4-7]。在研究当中,假设施加的运动是简谐的并且参考马蒂厄方程。然而,在规则波的作用下研究参数激励只能体现系统的一般运动,这与其在实际随机海况下的运动是完全不同的。
参数激励的不稳定性确实会发生在不规则波中。近几年中,多艘现代船型都经历了由于参数横摇所引起的严重事故[8]。前人在做张紧立管的振动研究时,主要集中到筋腱或立管的研究中所讨论的参数共振或马蒂厄不稳定性都是在假设张力振动或顶部运动为简谐运动,只是输入简单的三角函数,或者是将不规则波简化为一系列的规则波叠加的形式作为顶部张力的输入函数。这样不能真实的反应出立管的顶部张力的变化情况。实际情况是波浪作用在与顶部张紧力管直接连接的浮式平台上。造成平台的运动,之后平台的运动在带动顶部张紧力管的运动。本文则是计算了平台在不规则波作用下运动情况,并将其作为顶部张紧立管张力的输入函数,计算了顶部张紧立管的稳定性曲线。同时,本文在计算过程中独立推导出在不规则波作用下顶部张紧立管的稳定性曲线的经验公式。
1理论及方法
1.1运动响应谱理论
张力腿平台在遭遇不规则波作用时,平台会发生垂荡运动响应。垂荡运动的谱密度为本文所研究的运动响应谱。垂荡运动的运动响应谱计算公式为
(1)
本文中研究的不规则波谱密度为PM谱。在给出有义波高H1/3和波浪谱峰周期Tp的情况下,PM波谱的谱密度如图1所示。S(ω)为
(2)


图1 有义波高为6.5 m,谱峰周期为4.5 s时PM谱Fig. 1 Significant wave height is 6.5 m, peak period is 4.5 s
因此,在分别得到张力腿平台的垂荡运动的传递函数和不规则波PM谱时,可以直接得出张力腿平台在相应的不规则波作用下垂荡运动的运动响应谱。
不规则波可以由无限多个单元规则波叠加而成,所以在频率由ωn~ωn+dω的平均波能,即波能谱密度为
(3)
如果dω足够小,可以认为波浪频率为ωn的单元规则波的波幅为an。则垂荡运动的运动响应谱与单元规则波幅an和波浪频率ωn的关系式:
(4)

(5)
式中:单元规则波的波频ωn与不规则波对应的计算结果相同。
1.2顶部张紧立管运动响应分析
1.2.1顶部张紧立管振动模型的建立
当张力腿平台遭遇不规则波作用时,张紧立管的顶部会随着平台的运动而运动。海洋立管顶端通过升沉补偿装置(张紧器)与平台相连,张紧器有2个主要作用:1)给立管提供较大的静顶张紧力,它提供的静张紧力一般设为立管湿重的1.2~1.6倍;2)避免平台升沉产生巨大的时变轴向力,实际上相当于一个连接立管和平台的弹簧。如图2所示。

图2 平台与立管的连接示意图Fig. 2 The connection diagram between platform and riser
将顶部张紧立管假设成浸入水中的一根顶部具有很大张力的细长梁[10]。立管顶部铰接平台,立管底部固定在土壤中。立管放置于稳定的均匀流中,并且波浪和流的方向不变。
根据基尔霍夫假说,顶部张紧立管的四阶微分平衡方程为[10]
(5)

(6)
式中:D为管径,h为壁厚,ρs为材料的密度,ρw为海水密度,ρi为内部流体密度,Ai为内径面积。
式(5)等号左边第2个非线性项为在考虑流的影响时,立管所遭遇的阻尼f(z,t),定义为
(7)
式中:Cd为水动力阻尼系数。
式(5) 等号左边的第4项为张力T对立管的影响,式中:T0为立管的静张力,Δk为立管顶端的张力系数。因为张力变化频率与平台垂荡频率相同,则bn和wn分别为式(5)的计算结果,φn为随机项。
1.2.2参激振动方程的建立
根据顶部张紧力立管的振动模型,式(5)的边界条件给定如下
(8)
式中:vplat(t)为平台的水平位移。
依据Galerkin的方法,设式(5)解的形式为
(9)
式中:sin(nπz/L)为模态分析中的特征函数,qn(t)为时间函数。
为了方便处理阻尼的平方项,对式(7)做线性化处理[11],得
(10)
式中:Vnm为立管n阶模态的运动速度。
将式(9)代入立管在不规则波和流联合作用下的动力式(5)中,并结合立管在无外激励下的动力平衡方程做进一步化简,得
(11)

再将式(11)的两边乘以φn(z)后沿立管从z=0到z=L积分,化简得
(12)
将式φn(z)=sin(nπz/L)代入式(12),并做进一步化简得
(13)
式(13)为Hill型参数激励振动平衡方程[12]。直接计算式(13)使结果出现长期项(即永年项)[13],会出现较大误差。
令qn(τ)=exp(-c′τ/(2M))g(τ),将该式代入式(14)得:


(14)
取
(15)
则式(14)表示为
(16)
1.2.3参激振动方程的求解
(17)
(18)
(19)
(20)
(21)
式(19)的解必须是周期为π或2π的周期函数,即
(22)
式中:δ和ζ分别为随机变量。
将式(22)代入式(19)得
(23)

(24)

(25)
同理,令m=k时,消去长期项,得到的边界曲线为
(26)
n≠0时,式(19)的通解为式(22)。将式(22)代入式(20)得

(27)
对式(27)做化简得
(28)
当m=2n时,式(28)消去长期项,得到的边界曲线为
(29)

(30)
当m=k, m+k=2n, k-m=2n, m-k=2n时,消去式(30)出现的长期项,则计算得到随机波浪条件下的稳定性边界曲线:
(31)
式中:m、k的下标1、2、3、4分别代表满足以上4种条件时的整数值。

(32)
当m=k, m+k=2n, k-m=2n, m-k=2n时,消去式(30)中出现的长期项,可以得到的边界曲线为
(33)
综上所述,顶部张紧立管在不规则波作用下的不稳定区域边界曲线为
当y=0时,
(34)
当x=0时,
(35)
计算流程如图3所示。

图3 计算流程图Fig. 3 The flow chart of calculation
2数值计算
2.1张力腿平台水动力计算
顶部张紧立管的稳定性边界曲线与不规则波波谱和平台垂荡运动的传递函数有关,所以,利用式(34)求解顶部张紧立管的稳定性边界曲线,首先需要知道不规则波波谱和平台垂荡运动的传递函数。
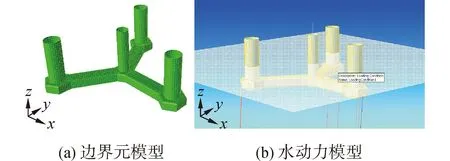
图4 三角形张力腿平台面元模型Fig. 4 The mesh model of triangular tension leg platform
对于张力腿平台的垂荡传递函数的计算,采用SESAM程序软件进行数值模拟,如图4。选取浪向角90°时张力腿平台的垂荡运动传递函数,如图5。
2.2考虑平台运动响应谱下顶部张紧立管的稳定性分析
在分别得到张力腿平台所遭受的不规则波波谱曲线和垂荡运动的传递函数后,应用式(37)、(38)计算得出顶部张紧立管的稳定性图,如图5、6所示。

图5 浪向角为90°时的垂荡运动传递函数Fig. 5 The heave response amplitude when wave direction angle is 90°

图6 随机波浪下张紧立管稳定性曲线Fig. 6 The stable curves of top tension risers in random waves
根据式(34)、(35)可以得出,张紧立管的稳定性曲线与m有直接的关系,其中m为将平台运动响应谱简化为一系列规则波的对应频率。
2.3运动响应谱对张紧立管的稳定性影响
分别计算出以平台运动响应谱(考虑RAO)和不规则波波谱(不考虑RAO)作为输出函数的张紧立管稳定性图,如图7所示。

出现如图7所示2种不同的计算结果的最主要原因是在计算张紧立管稳定性曲线时,参数bm作为输出参数起到很重要的影响。当采用不考虑RAO的计算方法时,参数bm直接选取为不规则波简化为一系列规则波的幅值;而当采用考虑RAO的计算方法时,参数bm选取为不规则波简化为一系列规则波的幅值与平台RAO的乘积。

图7 是否考虑平台RAO对张紧力管稳定性的影响Fig. 7 The influence of RAO to the stable curves of top tension riser
3结论
综合分析张力腿平台在不规则波中的运动。计算了张力腿的参数激励运动,得到了如下结论:
1)文中结合了张力腿平台本身运动的RAO及不规则波波浪谱。得出了张力腿平台的运动响应谱,并且利用一系列的规则波叠加的形式来表达运动响应谱。将该部分作为顶部张紧立管的输入部分。
2)应用顶部张紧立管的振动模型,将得到的在不规则波作用下的响应谱输入参激振动模型当中。独立的推导出了一种可以直接得出张紧立管的稳定性曲线的经验公式。
3)最后,在计算时考虑的顶部张紧立管的张紧力并不是直接利用不规则波波谱得出,而是利用与张紧立管连接的平台特性(RAO)得出的运动响应谱作为张紧立管的输出,这样更为直接真实的反应出顶部张紧立管的张紧力的变化。这对评估张紧立管的稳定性提出了更加符合实际情况的方法。
参考文献:
[1]郭海燕, 傅强, 娄敏. 海洋输液立管涡激振动响应及其疲劳寿命研究[J]. 工程力学, 2005, 22(4): 220-224.
GUO Haiyan, FU Qiang, LOU Min. Vortex-induced vibrations and fatigue life of marine risers conveying flowing fluid[J]. Engineering mechanics, 2005, 22(4): 220-224.
[2]CRUZ A M, KRAUSMANN E. Damage to offshore oil and gas facilities following hurricanes Katrina and Rita: an overview[J]. Journal of loss prevention in the process industries, 2008, 21(6): 620-626.
[3]YANG Hezhen, LI Huajun. Instability assessment of deep-sea risers under parametric excitation[J]. China ocean engineering, 2009, 23(4): 603-612.
[4]PATEL M H, PARK H I. Dynamics of tension leg platform tethers at low tension. Part I-Mathieu stability at large parameters[J]. Marine structures, 1991, 4(3): 257-273.
[5]TAO Longbin, LIM K Y, THIAGARAJAN K. Heave response of classic spar with variable geometry[J]. Journal of offshore mechanics and arctic engineering, 2004, 126(1): 90-95.
[6]CHATJIGEORGIOU I K, MAVRAKOS S A. Bounded and unbounded coupled transverse response of parametrically excited vertical marine risers and tensioned cable legs for marine applications[J]. Applied ocean research, 2002, 24(6): 341-354.
[7]KOO B J, KIM M H, RANDALL R E. Mathieu instability of a spar platform with mooring and risers[J]. Ocean engineering, 2004, 31(17/18): 2175-2208.
[8]HUA Jianbo, WANG Weihui. Roll motion of a roroship in irregular following waves[J]. Journal of marine science and technology, 2001, 9(1): 38-44.
[9]FRANCE W N, LEVADOU M, TREAKLE T W, et al. An investigation of head-sea parametric rolling and its influence on container lashing systems[J]. Marine technology, 2003, 40(1): 1-19.
[10]YANG Hezhen, XIAO Fei, XU Peiji. Parametric instability prediction in a top-tensioned riser in irregular waves[J]. Ocean engineering, 2013, 70: 39-50.
[11]CHANG Y. Nonlinear analysis of tension leg of tension leg platform[D]. Berkeley: University of California, 1986: 128.
[12]盛宏玉. 结构动力学[M]. 第2版. 合肥: 合肥工业大学出版社, 2007.
SHENG Hongyu. Structural dynamics[M]. 2nd ed. Hefei: Hefei University of Technology Press, 2007.
[13]唐友刚. 高等结构动力学[M]. 天津: 天津大学出版社, 2002.
TANG Yougang. Advancd structural dynamics[M]. Tianjin: Tianjin University Press, 2002.
Study of stability curves of a top tension riser under the effect of response spectrum of platform motion
SUN Liping, WANG Jianwei, DAI Shaoshi
( School of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)
Abstract:Regarding the problem of the potential instability of the top tension riser under irregular wave action, we obtained stability curves for the top tension riser under the effect of the platform's motion response spectrum. First, we calculated the motion response spectrum of the tension leg platform. Based on the features of the motion response spectrum, we superimposed the motion response of the tension leg platform on a series of regular waves. The regular wave series were then input into the top tension risers' parametrically excited vibration equation. By applying the Galerkin method, we simplified the control equation and obtained the parametrically excited Mathieu equation. Finally, we obtained the stability curve equations of the top tension riser by deducing the small parameters. The results prove that the platform's motion response spectrum is vital to the stability of the top tension riser.
Keywords:irregular wave; response spectrum; top tension riser; Mathieu equation; stability curve
中图分类号:TE58; O322
文献标志码:A
文章编号:1006-7043(2016)03-326-06
doi:10.11990/jheu.201412075
作者简介:孙丽萍(1962-),女,博士生导师,教授;戴绍仕(1976-),女,副教授.通信作者:戴绍仕,E-mail:daishaoshi@163.com.
基金项目:国家自然科学基金资助项目(11472087);111深海工程创新引制计划资助项目(B07019).
收稿日期:2014-12-29.
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20160104.1427.006.html
网络出版日期:2016-01-04.