翼身融合水下滑翔机外形设计与水动力特性分析
2016-04-24孙春亚宋保维
孙春亚,宋保维,王 鹏
(西北工业大学 航海学院,陕西 西安 710072)
翼身融合水下滑翔机外形设计与水动力特性分析
孙春亚,宋保维,王 鹏
(西北工业大学 航海学院,陕西 西安 710072)
为了提高水下滑翔机的水动力性能,本文将航空航天领域先进的翼身融合布局引入到水下滑翔机外形设计中,并对其水动力性能进行研究与分析。首先,对比 3 种具有代表性的水下滑翔机常用壳体形状的几何参数,选用扁平椭球体作为翼身融合水下滑翔机壳体的基本形状;在此基础上,设计出翼身融合水下滑翔机的三维模型;最后,采用计算流体力学(CFD)的方法对翼身融合水下滑翔机进行仿真模拟并分析其水动力性能,结果表明,采用翼身融合布局的水下滑翔机,其水动力性能得到显著提高。
水下滑翔机;翼身融合;计算流体力学;结构化网格;水动力特性
0 引 言
水下滑翔机是一种利用净浮力和姿态角调节获得推进力的新型水下航行器。相比于传统水下航行器,水下滑翔机具有成本低、航程远、持续工作能力强等优点。自 1989 年 Henry Stommel 首先提出“水下滑翔机”的概念以来[1],各式各样的水下滑翔机被研制出来并广泛应用于海洋探索之中。
传统水下滑翔机外形是由回转体壳体、水翼和操纵面组成。然而,回转体壳体外形不能像水翼一样提供非常高的升力,所以传统对回转体型的水下滑翔机即使在搭载了高展弦比水翼的情况下,其最大升阻比只能达到 5 左右[2],这严重影响了水下滑翔机的经济性。为了获得更高的水动力性能,2006 年,美国海军研究办公室研制出了飞翼(Flying Wing)构形的水下滑翔机 Xray[3]。飞翼构形是一种通过去除滑翔机的主体提高升阻比的外形布局。虽然这种构形显著地提高了滑翔机的最大升阻比,然而因为没有明显的主体,所以飞翼滑翔机的内部空间受到严重限制,无法安装更多的仪器和能源。
翼身融合(Blended-Wing-Body,简称 BWB)布局的概念最早诞生于航空工业[4],使用翼身融合设计的飞机,有扁平且有翼剖面形状的机身,能产生一部分的升力。它的机翼与其他部位,则是平滑的与机身接合。这种构形即具有较高的升阻比,又有足够的内部空间,弥补了飞翼构形的缺点。
本文将翼身融合的概念应用到水下滑翔机的外形设计当中,设计一种小型翼身融合式水下滑翔机(50~70 kg),并用传统水下滑翔机 Seaglider、扁平椭球壳体的水下滑翔机和翼身融合式水下滑翔机进行流体动力仿真,对结果进行分析对比。结果表明,相比于传统水下滑翔机,翼身融合水下滑翔机的水动力性能得到巨大提升。
1 外形设计
1.1 壳体形状的选取
传统水下滑翔机一般采用回转体壳体,最常见的回转体壳体外形是带平行中段的水滴形(见图1),如 Slocum滑翔机[5]和 Spray 滑翔机[6],其优点是可获得较大的艇体容积。为了降低水下滑翔机的阻力从而提高升阻比,Huggins 和 Packwood 提出[7]另一种壳体外形:低阻层流形壳体(见图2),其优点在于通过形成合理的压力梯度,使得总长中大部分是层流段,从而阻力非常低,如 Seaglider 滑翔机[8]。然而,无论回转体壳体外形如何改进,都不能像水翼一样提供非常高的升力,所以传统对回转体型的水下滑翔机即使在搭载了高展弦比水翼的情况下,其最大升阻比只能达到 5 左右。2005 年,Graver J G[9]设计了一种以扁平椭球体(见图3)为壳体的水下滑翔机。文献[9]在内部容积相等的前提下,对回转体壳体和扁平椭球体壳体的水下滑翔机的水动力性能进行了初步对比研究,研究发现扁平椭球体壳体的水下滑翔机的升阻比要大于传统的回转体壳体的水下滑翔机。
传统水下滑翔器的总体质量大约为 50~70 kg 左右。本文设计的翼身融合水下滑翔机总质量设定在 60 kg左右。上述 3 种壳体的基本尺寸见表1。
从表1 可看出,在相同体积下,壳体 3 的浸湿表面积要小于壳体 1 和壳体 2 的浸湿表面积,这意味着壳体 3 相比于壳体 1 和壳体 2 具有较小的粘性阻力;壳体 3 在 XOZ 平面的投影面积要大于壳体 1 和壳体 2在 XOZ 平面的投影面积,这意味着壳体 3 相比于壳体1 和壳体 2 可以产生较大的升力。因此,为使设计出的翼身融合水下滑翔机具有较高的升阻比,本文采用扁平椭球体作为壳体的基本形状。

图1 壳体Fig. 1 Body type 1

图2 壳体Fig. 2 Body type 2

图3 壳体Fig. 3 Body type 3

表1 三种壳体的几何参数Tab. 1 Geometric parameters of three bodies
1.2 机翼与机身融合方式
翼身融合布局的概念是指机身和机翼平滑的过渡融合,使滑翔机具有更好的流体动力性能。然而,扁平椭球体形的壳体很难与截面为 NACA00 系列翼型的机翼平滑地融合。而且,扁平椭球体壳体的弦向截面都是椭圆形,其流体动力性能不如 NACA00 系列翼型。因此,如图4 所示,本文并没有将扁平椭球体壳体与滑翔机机翼直接融合,而是先将扁平椭球体壳体与滑翔机机翼在 ZOX 平面的投影形状用 3 次贝塞尔曲线平滑地过渡融合,再将滑翔机的每个弦向截面都定义为 NACA00 系列翼型,且使翼型截面的厚度沿 Z 轴方向平滑过渡。本文设计的翼身融合水下滑翔机的三维模型如图5 所示。

图4 翼身融合设计示意图Fig. 4 Diagrammatic sketch of the BWB design

图5 翼身融合水下滑翔机三维模型Fig. 5 The 3Dmodel of the BWB underwater glider
2 数值方法
2.1 控制方程
本文流体动力数值分析中所用的控制方程是不可压缩粘性流的 Navier-Stokes 方程,其主要包括连续性方程和动量方程[10],即

2.2 湍流模型
本文采用的湍流模型为剪切应力输运 k-ω 模型(简称 SST k-ω 模型),该模型综合了 k-ω 模型在近壁面计算的优点和 k-ε 模型在远场计算的优点,其适用范围更广。
湍流强度 k 方程和频率 ω 方程[11]如下:


式中:Pk为由层流速度梯度而产生的湍流动能,σk=2.0 和 σω=2.0 分别为 k 方程和 ω 方程的湍流能量普朗克数;a=5/9 为 ω 梯度产生的湍动能系数;bk=0.09和 bω=0.075 分别为 k 和 ω 扩散产生的湍动能系数;为涡黏度。
2.3 计算域和网格划分
由于本研究只计算滑翔机在不同攻角下的流体动力且滑翔机左右对称,所以可以取其一半划分网格进行计算。如图6 所示,计算区域为长 25×ctm,宽 15×ctm,高 20×ctm(ct为滑翔机的中心弦长)的长方形区域。速度入口设在距滑翔机的前端 10×ctm处;压力出口设在在距滑翔机的尾端 15×ctm处。
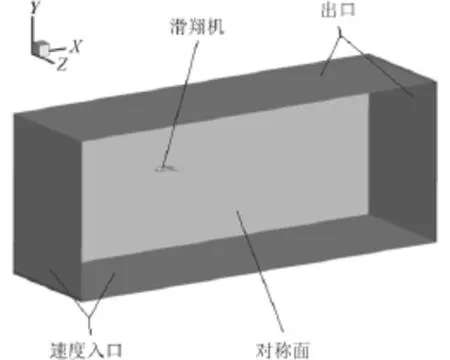
图6 计算域Fig. 6 Computational domain
计算域的边界条件设定如下:
1)入口设为 inletvelocity 边界类型,选择笛卡尔坐标系速度分量定义方式,具体速度分量随攻角 α 的变化而变化,但其合速度大小为 0.35m/s;
2)出口设为 pressure outlet 边界类型;
3)对称面设为 symmetry 边界类型;
4)滑翔机壁面设为无滑移壁面;
5)壁面设为自由滑移边界。
网格划分采用六面体结构化网格,数量在 200 万到 250 万之间。图7 展示了对称面的网格划分情况。如图8 所示,水下滑翔机壳体壁面处采用 O 网格进行加密,壁面第 1 层网格的 y + 值小于 5。
3 结果与分析
为能更好地分析翼身融合水下滑翔机的水动力性能,本文对 3 种具有代表性的水下滑翔机模型进行了数值模拟。模型 1(见图9)为根据低阻层流回转体形水下滑翔机 Seaglider 的外形设计参数[12]生成的三维模型;模型 2(见图10)为扁平椭球体水下滑翔机;模型 3(见图11)为在模型 2 的基础上进行翼身融合设计的水下滑翔机三维模型。

图7 结构化网格整体视图Fig. 7 Grid structure in the computational domain
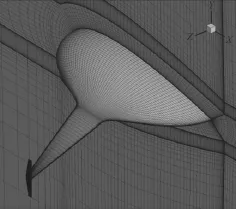
图8 机身表面的结构化网格Fig. 8 Detail of the boundary layers near the glider body

图9 模型 1:Seaglider 滑翔机Fig. 9 Model 1: Seaglider underwater glider
三种模型的主要几何参数见表2。由表2 可知,模型 1,模型 2 与模型 3 的排水量都在 50~70 L 之间,都属于小型水下滑翔机。其中,模型 2 采用扁平椭球体作为滑翔机的主体,所以在 3 种模型中具有最大的排水量和最小的浸湿表面积;模型 3 是在模型 2 的基本形状上进行翼身融合设计而得,其排水量略小于模型 2 且浸湿表面积略大于模型 2;模型 1 作为传统回转体水下滑翔机 Seaglider 的三维模型,其排水量最小且浸湿表面积最大。
在航速 0.35m/s,攻角 0°~20° 的工况下,对 3 种模型进行 CFD 数值计算,将 3 种模型的阻力、升力和升阻比汇总并绘制成随攻角 α 的变化曲线图(见图12~图14)。

图10 模型 2:扁平椭球体水下滑翔机Fig. 10 Model 2: underwater glider withaflat ellipsoid body

图11 模型 3:翼身融合式水下滑翔机Fig. 11 Model 3: BWB underwater glider

表2 模型具体参数对照表Tab. 2 Parameters of specificmodels

图12 阻力随 α 的变化曲线Fig. 12 Curves of drag changing with α
由图12 可知,在 0° 攻角下,模型 1 的阻力最小,模型 3 的阻力略大于模型 1,而模型 2 的阻力明显大于模型 1 和模型 3。3 种模型的阻力都与攻角呈二次函数关系,其中,模型 1 随攻角的增大而增长的较慢,模型 3 随攻角的增大而增长的较快。由此可看出,模型 1 的低阻层流型外壳具有非常好的减阻特性;由于模型 3 相较于模型 2 进行了翼身融合设计,其 0° 攻角下的阻力要小于模型 2,但阻力随攻角的增长速度快于模型 2。
由图13 可知,3 种模型均随攻角的增大而增大,在小攻角(0°~10°)下,升力与攻角程线性关系,当攻角大于 10° 时,升力随攻角的增长速度逐渐变慢。模型 3 和模型 2 由于采用扁平体壳体,其 ZOX 平面上的投影面积远大于模型 1,因此,相同攻角下,模型 3和模型 2 的升力远大于模型 1 的升力;模型 3 相较于模型 2 进行了翼身融合设计,ZOX 平面上的投影面积进一步增大,因此,相同攻角下,模型 3 的升力大于模型 2 的升力。
由图14 可知,3 种模型的升阻比随攻角的增大先增大后减小,且都在 8° 攻角附近达到最大升阻比,即3 种模型都在 8° 攻角附近具有最大滑翔经济性。由于模型 3 既有较好的阻力特性又有良好的升力特性,所以模型 3 的升阻比远大于模型 1 与模型 2。
图15 和图16 分别为模型 2 与模型 3 的上、下表面的压力分布云图。从图中可看出,进行翼身融合设计的模型 3 的压力梯度分布比较均匀,而未进行翼身融合设计的模型 2 在机翼与壳体连接出压力集中却分布不均匀,这是导致模型 3 的阻力小于模型 2 的主要原因之一。

图13 升力随 α 的变化曲线Fig. 13 Curves of lift changing with α

图14 升阻比随 α 的变化曲线Fig. 14 Curves of lift to drag ratio changing with α
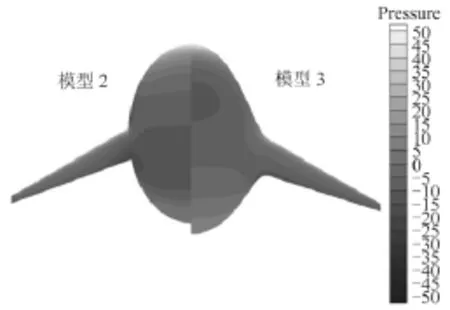
图15 模型 2 和模型 3 下表面压力云图Fig. 15 Pressure distributions of the lower surface

图16 模型 2 和模型 3 上表面压力云图Fig. 16 Pressure distributions of the upper surface
在水下滑翔机外形设计中,升阻比是衡量水下滑翔机水动力性能最重要的指标之一,除了尽量获得尽可能高的升阻比之外,尽量降低水动力对滑翔机 OZ轴的俯仰力矩,可以增加水下滑翔机的航行稳定性。为了综合描述水下滑翔机的水动力性能,本文引用文献[13]中提出的水动力性能加权公式:

由表3 可知,模型 3 的加权值最高,即具有翼身融合外形的模型 3 的水动力性能要远远好于模型 1 和模型 2。以上数据表明,翼身融合水下滑翔机在航行过程中具有更高的工作效率。

表3 水动力性能对照表Tab. 3 The hydraulic performance comparison of specificmodels
4 结 语
本文将航空航天领域先进的翼身融合布局引入水下滑翔机的外形设计当中,对翼身融合水下滑翔机进行了初步的外形设计与水动力性能分析。结果表明,翼身融合布局极大地改善了水下滑翔机的水动力性能。本文的研究成果主要有:
1)扁平椭球体壳体相比与传统的细长回转体壳体具有较大的容积和较小的浸湿表面积,其更适合作为翼身融合水下滑翔机机身的基本形状;
2)扁平椭球体型的水下滑翔机的水动力性能高于传统水下滑翔机;
3)扁平椭球体型的水下滑翔机在进行翼身融合设计之后,其压力分布得到极大改善,水动力性能进一步提高。翼身融合水下滑翔机的阻力、升力和升阻比随攻角的变化趋势与传统滑翔机基本一致,并且翼身融合水下滑翔机的水动力性能远远高于传统水下滑翔机。
[1]STOMMEL H. The Slocummission[J]. Oceanography, 1989, 2(1): 22-25.
[2]李志伟, 崔维成. 水下滑翔机水动力外形研究综述[J]. 船舶力学, 2012, 16(7): 829-837.
[3]ONR. Liberdade XRay advanced underwater glider[EB/OL]. http://www.onr.navy.mil/media/extra/fact_sheets/advanced_un derwater_glider.pdf.
[4]朱自强, 王晓璐, 吴宗成, 等. 民机的一种新型布局形式-翼身融合体飞机[J]. 航空学报, 2008, 29(1): 49-59.
[5]WEBB D C, SIMONETTI P J, JONES C P. SLOCUM: an underwater glider propelled by environmental energy[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 447-452.
[6]SHERMAN J, DAVIS R E, OWENS W B, et al. The autonomous underwater glider "Spray"[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 437-446.
[7]HUGGINS A, PACKWOODaR. Wind tunnel experiments onafully appended laminar flow submersible for oceanographic survey[J]. Ocean Engineering, 1995, 22(2): 207-221.
[8]ERIKSEN C C, OSSE T J, LIGHT R D, et al. Seaglider:along-range autonomous underwater vehicle for oceanographic research[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 424-436.
[9]GRAVER J G. Underwater gliders: dynamics, control and design[D]. Princeton: Princeton University, 2005.
[10]景思睿, 张鸣远. 流体力学[M]. 西安: 西安交通大学出版社, 2001: 91-96.
[11]胡志强, 林扬, 谷海涛. 水下机器人粘性类水动力数值计算方法研究[J]. 机器人, 2007, 29(2): 145-150.
[12]RUDNICK D L, DAVIS R E, ERIKSEN C C, et al. Underwater gliders for ocean research[J].marine Technology Society Journal, 2004, 38(2): 73-84.
[13]谷海涛, 林扬, 胡志强, 等. 基于代理模型的水下滑翔机机翼设计优化方法[J]. 机械工程学报, 2009, 45(12): 7-14.
Shape design and hydrodynamic characteristics analysis of the blended-wing-body underwater glider
SUN Chun-ya, SONG Bao-wei, WANG Peng
(School ofmarine Science and Technology, Northwestern Polytechnical University, Xi'an 710072, China)
In order to improve the hydrodynamic performance of underwater glider, research was done on the shape design and hydrodynamic characteristics analysisof the Blended-Wing-Body (BWB) underwater glider.Firstly, the flat ellipsoid shell, as the basic shape of the fuselage of the BWB underwater glider, was selected by comparing the geometrical parameters of the common shell shape of the three conventional underwater glider. Then, based on the flat ellipsoid body, the shape of BWB underwater glider was design. Finally, simulation has been done through computing fluid dynamics (CFD) for five typical designtypes, and the results show that the hydrodynamic performance of the underwater glider with the blendedwing-body configuration is significantly improved.
underwater glider;Blended-Wing-Body;computing fluid dynamics;structured grid;hydrodynamic characteristics
TP242
:A
1672 - 7619(2016)10 - 0078 - 06
10.3404/j.issn.1672-7619.2016.010.015
2016 - 03 - 22;
2016 - 05 - 18
国家自然科学基金资助项目(51375389)
孙春亚(1988 - ),男,博士研究生,研究方向为水下滑翔机设计。
