机器人产业及其关键材料的现状及趋势
2016-04-23化定奇
化定奇
机器人是汇集材料、机械、电子、控制和计算机技术等一系列学科所形成的高新技术集合体,机器人技术及产业化应用是衡量一个国家科技创新、高端制造发展水平的重要标志。国际金融危机后,发达工业国家纷纷将机器人的发展上升为国家战略,力求继续保持领先优势。我国也高度重视机器人产业的发展,2013年12月22日,工业和信息化部发布了《关于推进工业机器人产业发展的指导意见》;2016年4月28日,工业和信息化部、国家发展和改革委员会、财政部联合印发了《机器人产业发展规划(2016-2020年)》;另外,《中国制造2025》也明确将工业机器人列入大力推动突破发展10大重点领域之一。
一、机器人产业的现状及发展趋势
1.現状:工业机器人是现阶段机器人的主要市场
机器人按照应用类型大致可分为工业机器人和服务型机器人2类。工业机器人典型应用包括焊接、刷漆、组装、包装、码垛、表面贴装技术(SMT)、产品检测和测试等。国际机器人联合会(IFR)于2016年2月发布了最新的全球工业机器人统计报告显示,2014年,全球工业机器人销量共计229 261台,销售总额达到107亿美元,如果包括软件、外围设备和系统工程的成本,机器人系统的全球市场规模为320亿美元;2015年全球工业机器人安装量预计比2014年至少增长15%,达到264 000台。而2014年全球服务机器人市场规模约为59.7亿美元,2015年估计将达到85亿美元。目前全球机器人市场主要以工业机器人为主,占市场份额的80%。
2.趋势一:服务机器人逐渐成为市场热点
目前,服务机器人正在成为机器人行业的热点。根据使用者不同情况,以及特定的使用环境的不同,服务机器人一般分为2大类:一类是个人/家庭服务机器人,如扫地机器人,娱乐/休闲机器人等;另一类是专业服务机器人,如康复机器人、手术机器人以及军用机器人等。服务机器人是机器人产业未来主要增长点,增长空间和潜力远大于工业机器人。据IFR预测,2015-2018年服务机器人总体市场规模394亿美元,4年复合增速21.07%,高于IFR预测的工业机器人15%的增速。
3.趋势二:机器人智能化程度将不断提升
传统的工业机器人是按事先编好的程序对机器人进行控制,使其自动重复完成某种方式的操作。随着技术的进步,机器人将逐渐进化成为能够利用各种传感器、测量器等来获取环境信息,然后利用智能技术进行识别、理解、推理最后作出规划决策,能自主行动实现预定目标的智能机器人。目前最先进的机器人之一是波士顿动力(Boston Dynamics)公布的新一代的人形机器人ATLAS,ATLAS在恶劣、复杂环境中能行动自如,在行进间受到物体撞击时能够保持平衡,能智能躲避障碍物,完成搜索并识别指定目标任务等。
智能机器人是机器人的终极目标,而作为传统工业机器人和智能工业机器人之间的过渡,人机协作机器人在未来一段时间内将成为主流,这种类型的机器人主要是填补全手动装配生产线与全自动生产线之间空白,机器人帮助人完成更加繁重和危险的工作,人则可以发挥创造性,处理更为复杂的项目。根据埃森哲(Accenture Consulting)的一项调查显示,85%的制造商预计,到2020年,制造业的技术焦点将转向“人机协作”。目前市场上已推出多款人机协作机器人,如丹麦Universal Robots的优傲(UR)系列机器人、瑞士ABB公司的双臂工业机器人YuMi、瑞士Mabi的单臂桌面机器人Speedy、美国Rethink的协作机器人Baxter、德国库卡(KUKA)的7轴轻型灵敏机器人LBR iiwa等等。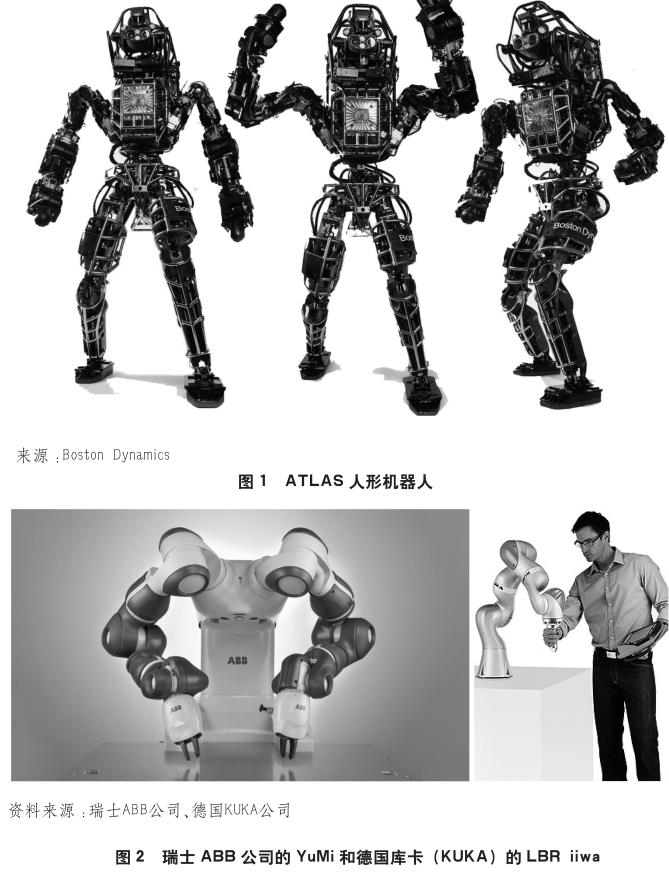
二、机器人关键部件用材料的现状及趋势
机器人主要由机器本体、减速器、伺服系统、控制系统、感知系统等部分组成,各部分对于材料种类和性能的需求不同。随着机器人市场规模和品类的不断扩大以及机器人智能化水平的不断提高,不仅将带动的相关材料需求规模的增加,同时对于相关材料的性能、种类也将提出更高的要求。
1.机器本体用高性能结构材料
(1)机器本体用材料的特点及常用材料
机器人本体是机体结构和机械传动系统,也是机器人的支承基础和执行机构,包括机身及行走机构、执行机构(包括臂部、腕部、手部)等。机器人本体是直接受力的构件,其材料应该具备如下几个特点:①强度高,能保证在较高外力作用下不发生永久变形和断裂;②弹性模量大或刚度高,具备较强的在受力时抵抗弹性变形的能力;③质量轻,机器人手臂构件中产生的变形很大程度上是由惯性力引起的,与构件的质量有关,轻量化材料有助于改善机器人操作的动态性能;④阻尼大,机器人执行机构过运动后,要求能平稳地停下来,可是在终止运动的瞬时构件会产生惯性力和惯性力矩,构件自身又具有弹性,因而会产生残余振动,采用大阻尼材料有助于吸收能量以提高执行机构的定位精度和传动平稳性。
现阶段广泛应用于机械制造、焊接、喷涂、搬运、包装等领域的工业机器人,机械臂、底座等机器本体最常用的材料是钢、铸铁以及铝合金等;在食品、医药等特殊应用领域,为满足苛刻的卫生标准,也有应用不锈钢等作为机器人本体材料,譬如KUKA公司的KR 15 SL型机器人等。
(2)轻量化结构材料有助于提升传统工业机器人的整体性能
在传统工业机器人领域,在满足高速度、高精度等基本性能要求的基础上,各大机器人制造公司通过运用轻量化结构材料减小工业机器人自重,不仅提升了机器人整体动力学性能,同时还可以降低能耗,减小环境污染。譬如:德国库卡公司在2005年第1个推出采用碳纤维复合材料制造的2款码垛机器人KR100-2PA和KR180PA,在保持强度、刚度未变的同时大幅减重,使码垛机器人在降低能源消耗的同时极大地提升了性能和安全性,而且更轻、更快、成本更低并显著提高了生产能力。日本发那科公司(FANUC)推出的一系列以P-250i B、P-50i B等为代表的六轴喷涂机器人,机械手臂和手腕所使用材料为不导电材料尼龙,节约能源的同时也降低了成本[1]。Codian Robotics最新的delta型机器人使用了碳纤维、钛、阳极电镀铝、316不锈钢和塑料等多种材料组合。总体来看,目前轻量化结构材料在传统工业机器人领域使用的比例越来越高。
(3)人机协作机器人和服务机器人对本体材料的轻量化要求更高
由于要与人频繁接触,安全性是人机协作机器人研发设计主要考虑的问题之一,即保证机器与人类一起协作工作时不会受到机器的伤害,其中轻量型设计是人机协作安全的一个可行方案,通过减轻机器人的机身质量,可以有效地降低其对人体的冲击,从而确保人机协作的安全。譬如瑞士ABB公司的人机协作机器人YuMi就通过采用轻量化的刚性镁铝合金骨架以及被软性材料包裹的塑料外壳等设计确保安全性;德国KUKA的人机协作机器人LBR iiwa的结构则是通过采用铝制材料来实现轻量化设计。
除了同样应考虑安全性因素以外,服务机器人的机动灵活性对本体材料的轻量化提出更高的要求。从目前市场上推出的服务机器人来看,大多采用了更加先进的轻量化材料。譬如外骨骼制造商Ekso Bionic于2012年推出的复健型的下肢外骨骼系统Ekso,为了兼顾了轻量化和耐用性,在关键的部位大量采用了铝合金、钛合金、碳纤维等轻量化金属材料和复合材料;松下2015年9月推出的可辅助重物装卸等作业的可穿戴式机器人“Assist Suite”,其零部件采用了先进的碳纤维材料,质量仅为6kg;谷歌旗下的波士顿动力学公司为美军研制的拥有高度机动能力的类人机器人Atlas为了适应复杂的恶劣的环境,并兼具灵活性和强壮,采用了航空级铝钛合金材料。另外,采用新的材料生产工艺也是实现机器人轻量化的重要方向之一,譬如Atlas当前的机械腿是由几十个通过螺栓和螺母连接的部件组成,而正在测试中的3D打印腿不仅结构非常简单,且许多重要的部位的内部是类似格子状的中空结构,将大幅降低了自身的质量。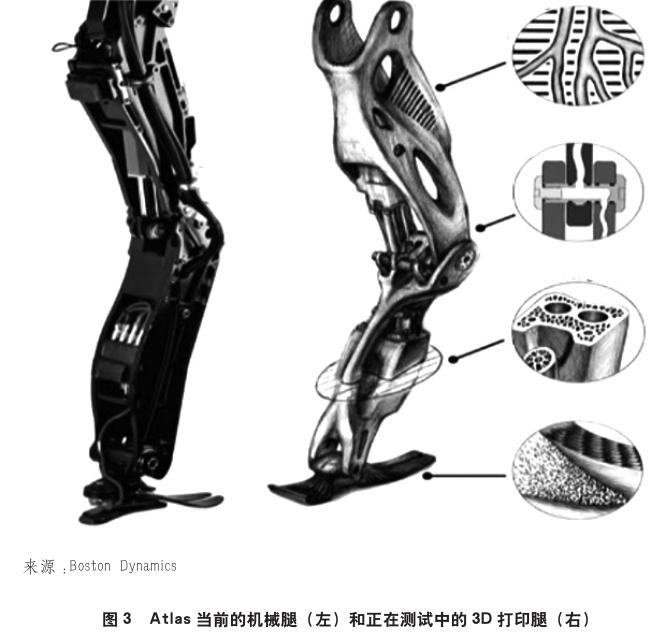
总体来看,目前铝合金、钛合金、镁合金、工程塑料、复合材料、碳纤维是当前常见和应用较多的轻量化材料,这些类型材料具有不同的属性特点、工艺技术水平和性价比水平。可以预见,未来多材料组合的轻量化结构和合适的材料用于合适类型的机器人是轻量化选材的发展方向。我国目前轻量化材料基本能够满足工业机器人和普通服务机器人的需求,但是在特种机器人領域所需的高性能轻量化材料(高强度、耐高温、耐腐蚀等)以及先进的材料生产工艺等方面与发达国家还有一定差距。
2.高精密减速器用高强度耐磨材料
高精密减速器是工业机器人的关节,是一种精密的动力传达机构,其利用齿轮的速度转换器,将电机的回转数减速到所要的回转数,并得到较大转矩的装置,从而降低转速,增加转矩。机器人需要结构简单紧凑、传递功率大、噪声低、传动平稳的高性能精密减速器,其中RV减速器(基于摆线齿轮机构的高精密减速机)和谐波减速器是精密减速器中重要的2种减速器。谐波减速器主要由波发生器、柔性齿轮和刚性齿轮3个基本构件组成,RV减速器主要由齿轮轴、行星轮、转臂、摆线轮、针轮、刚性盘与输出盘等组成。
高精密减速机属于纯精密机械部件,对材料和工艺水平要求高,高品质齿轮钢、轴承钢是制造精密减速器的关键材料之一,要求其具有较高的强度、韧性和耐磨性;另外由于机器人对减速机的精度要求很高,所以还要求材料工艺性好。目前常用的材料包括30CrMnSi、35CrMnSiA、40CrNiMoA、45钢、40Cr等。与国外相比,我国相关材料在性能方面与国外还有一定的差距,《高品质特殊钢科技发展“十二五”专项规划》将高品质轴承钢、齿轮钢等生产技术列入钢铁行业“十二五”期间的技术创新重点;《机器人产业发展规划(2016-2020年)》也提出要通过发展高强度耐磨材料技术等实现高精密减速器的突破。
3.伺服电机用高性能磁性材料
机器人电动伺服驱动系统是利用各种电机产生的力矩和力,直接或间接地驱动机器人关节以获得机器人的各种运动的执行机构。驱动机器人的关节活动的电机要求有高功率质量比、高扭矩惯量比、高起动转矩、低惯量和较宽广且平滑的调速范围,机器人末端执行器(手爪)更是要求电机的体积、质量尽可能小;在要求快速响应时,驱动电机必须具有较高的可靠性和稳定性,并且具有较大的短时过载能力。稀土永磁电机具有体积小、损耗低、高效率、高可靠性等优点,是高精度、微进给伺服系统的最佳选择。
在稀土永磁电机中,以钕铁硼为代表的稀土永磁材料是稀土永磁电机的最关键的材料。钕铁硼是目前综合性能最高的一种永磁材料,具有极高的磁能积、高矫顽力、高能量密度等优点,其高效节能、质量轻、体积小、控制调速性好等特点非常符合机器人伺服电机的要求。我国是钕铁硼产业大国,产量占全球近80%市场份额,部分企业生产的高性能钕铁硼永磁材料的磁性能达到国际先进水平。但是整体来看,高性能钕铁硼材料与日本还有一定的差距。随着服务机器人的兴起,机器人的机动灵活性要求及自主行动的趋势对驱动电机的微型化、高功率密度提出更高要求,需要进一步探索和发现新型高性能磁性材料。
4.感知系统用传感材料
随着机器人智能化水平的不断提高,其显著的特点之一就是机器人身上的传感器数量将越来越多,例如触觉传感器、视觉传感器、力觉传感器、接近觉传感器、超声波传感器和听觉传感器等。人机协作机器人相比传统工业机器人,需要安装传感器来感知周围环境的变化以确保人的安全性,而智能机器人收集、决策并自主行动则需要更多的传感器。譬如,美国Rethink公司的Baxter协作机器人的头顶有一圈声纳传感器,只要有人过于接近工作区域,机器人就会放慢动作;YuMi也装了多个力传感器,一旦机器人处于运动状态的手臂可能触碰到工人,它就会自动放慢速度或者停止运动。智能化水平更高的类人机器人Atlas安装了更多的传感器,包括身体和腿用来保持平衡的传感器,位于其四肢以防侧翻的传感器,用来识别箱子或门上类似QR(快速响应编码)的编码的传感器,安装于头部与激光雷达一起用来以避开障碍物、评估地形和帮助导航的立体传感器等。
传感器材料是传感器技术的重要基础,传感器需求的增加大大提升对传感材料的需求。传感器材料种类繁多,几乎可以涵盖导体、半导体和绝缘体等各个材料类型。但各种类型的半导体(晶体、非晶体、陶瓷)仍然是当前最通用、最重要的传感器材料。其中应该最广泛、功能最齐全的首推硅和以硅为组元的化合物和固溶体,如碳化硅、锗硅合金、多晶硅、非晶硅等;除半导体外,常用的传感器材料还包括某些塑料、金属和非半导体陶瓷制成的铁磁材料、压电材料和热电材料等以及某些玻璃、光学纤维和光学晶体等传感器材料[2]。机器人对于传感器的有着非常严格的要求,包括要求传感器的精度高、稳定性好、靠干扰性强、重量轻、体积小等,这对传感材料的种类和工艺也提出更高的要求。
另外,新型传感器材料及传感器的研发将进一步提升机器人的智能化水平。譬如美国麻省理工学院和波士顿东北大学成功研制的由一块透明的合成橡胶层(单面喷金属漆)组成的触觉传感器GelSight,使机器人手指比人类手指更加灵活敏感;东京大学科学家通过在室温下沉积超纤薄氧化铝层在一个透明聚合物箔片,之后附加电路元件至氧化物基片上的方法,研制出一种布满传感器的透明塑料薄片,这种塑料质地电路比羽毛还轻,仅有1μm厚度,非常柔韧,可以制作成为机器人的“感官皮肤”。
三、结语
当前我国机器人产业的发展已经步入了快车道,机器人产业园“一哄而上”,用过热形容也不为过,但在“机器人热”背后是低水平重复建设,伺服电机、减速器等核心零部件高度依赖进口、主要部件所需的关键材料与国外相比存在不同程度的差距等问题。当前发展机器人产业,应着眼长远,着重发展关键材料及核心部件等基础性技术,夯实产业基础,真正实现产业的可持续健康发展。
参考文献
[1] 田龙飞.工业机器人用碳纤维复合材料上臂的设计[D].北京:中国科学院大学,2014:13-14.
[2] 王占国,陈立泉,屠海令.信息功能材料手册[M].北京:化学工业出版社,2009:183.
