大型飞机推力调节应急飞行控制研究
2016-04-22唐志帅,刘兴华
大型飞机推力调节应急飞行控制研究
0引言
航空运输是公认的最安全的交通运输手段之一,然而致命的飞行事故仍时有发生。大型飞机由于常规操纵舵面失效、飞行控制能力丧失而导致重大的飞行事故,这在各个国家的航空史上屡见不鲜,其中不乏机毁人亡的严重后果[1]。
当舵面控制能力失去后,驾驶员不得不通过调节发动机推力大小实现应急控制。从日航波音747撞山事件和苏城空难的飞行航迹可知,飞行舵面控制能力丧失后,驾驶员尝试手动控制发动机推力,由于推力改变飞机所受力和力矩的能力十分有限,以及发动机响应的延迟特性,手动油门易激发纵向长周期震荡和横航向荷兰滚模态,因此如何抑制长周期震荡和荷兰滚模态,并在有限的控制能力下实现航迹控制是PCA技术研究的重点。美国NASA率先开展了推力调节的研究,但缺少动力学角度的分析,国内这方面的研究非常有限,文中笔者将两侧发动机推力视为被控量,针对飞机纵向、横航向模型分别设计增稳回路,有效抑制了长周期震荡和荷兰滚模态。
1PCA动力学分析
利用发动机推力进行轨迹控制,纵向通道主要是控制左右两侧发动机的对称推力,使速度、俯仰力矩发生变化,从而控制飞行的纵向轨迹。航向通道则控制左右发动机差动推力,形成航向控制力矩以控制飞机水平面内的飞行轨迹[2]。假设单台发动机推力作用点坐标为(lx,ly,lz),安装角分别为上偏角αT和内偏角βT,则推力T对飞机三轴方向产生的力和力矩为:
(1)
(2)
为不失一般性,以波音747-100飞机为例,推力调节操纵原理的具体描述如下(安装角较小,为简单起见,令cosαT≈1,cosβT≈1):
纵向通道的对称推力发生变化后,即四台发动机推力同时变化ΔT,此时飞机三轴外力变化(4ΔT,0,-0.174 4ΔT)、外力矩变化(0,12.192ΔT,0)。对称推力沿x轴有一个大小为4ΔT的推力分量,由于飞机的速度稳定性,引起航迹角γ发生变化;对称推力沿机身轴线的垂直分量0.174 4ΔT,可直接引起航迹角γ变化;大型飞机发动机的推力线一般位于重心下面,因此推力变化可以引起飞机俯仰力矩变化12.192ΔT,也可以改变航迹。
航向通道差动推力变化后,即左侧两台发动机推力变化ΔT,右侧变化-ΔT,此时飞机沿三轴外力变化(0,0.139 6ΔT,0)、外力矩变化(2.897 1ΔT,0,66.446 4ΔT)。差动推力的侧向分量0.139 6ΔT可直接改变航向;差动推力在飞机转弯时产生偏航力矩66.446 4ΔT;其沿机身轴线的垂直分量产生滚转力矩2.897 1ΔT,此外由于飞机侧滑,后掠机翼和垂直尾翼也提供额外的滚转力矩。所有这些滚转力矩,通常与偏航是同一个方向,使飞机向偏航的方向滚转。因此,在应急情况下,通过正确地调节差动推力,可以使飞机精确地调整到期望的角度,从而改变航向[3]。
针对纵横向分组的飞机六自由度非线性方程,纵向状态变量取xl=[V,α,θ,q]T,横航向变量取xt=[β,p,r,φ]T,利用小扰动原理,对非线性方程线性化,可得到状态方程如下:
(3)
(4)
式中,TL、TR分别为左右两侧发动机推力;Al、At与常规模型类似,不再列出;Bl、Bt分别为:
(5)
(6)
式(5)中,各变量定义如式(7)所示:
(7)
式(6)中,各变量定义如式(8)所示:
(8)
由模型可见,推力变化对速度、迎角、滚转角等诸多变量均有影响。PCA问题重点关注航迹角和滚转角的推力响应特性,因此,针对波音747-100飞机,可获得巡航状态下(高度8km,速度250m/s)对称推力ΔTl到航迹角Δγ、差动推力ΔTt到滚转角Δφ的传递函数,分别为:
(9)
(10)
式(9)、(10)中,传递函数的增益分别为1.444 5E-06、9.190 8E-04,显然差动推力对滚转角具有足够的控制能力,此外在50KN对称推力作用下,航迹倾斜角可变化5°,基本满足要求。由以上分析可知,发动机推力调节对于舵面失效飞机具有一定的控制能力,而且差动推力对于横航向的控制能力更为突出。
2PCA总体方案
本文构建的航迹角、滚转角控制系统总体方案如图1所示。

图1 PCA应急控制系统总体方案
当飞控舵面失效后,驾驶员可通过飞行模式控制面板手动切换至PCA应急模式,并输入航迹倾斜角和滚转角指令,指令信号和反馈信号(传感器测量得到)一起送入飞行控制计算机,计算得到用于产生对称推力、差动推力的发动机指令信号EPR(Engine Pressure Ratio,以下简称EPR),并将EPR指令分别送入左侧、右侧发动机,通过调节两侧发动机推力实现应急飞行控制功能[3-5]。
3综合飞行/推进系统模型
本文以波音747-100型飞机作为仿真对象,可得巡航状态下Al、Bl表示的纵向模型和At、Bt表示的横航向模型。
(11)
(12)
(13)
(14)
波音747-100飞机翼吊四发JT9D-3型涡扇发动机,根据发动机建模数据,在高度、马赫数确定的情况下,可建立净推力与EPR的关系。发动机的延迟特性,可采用一阶环节模拟,其响应时间常数随高度变化,海平面高度为1.1s,11 000m高度为2.5s,其他高度的延迟时间常数按照线性插值处理。由此可得到各状态点发动机模型为:
(15)

4PCA控制系统设计
4.1PCA纵向航迹角控制
对于纵向航迹角控制,利用传统飞控系统内外环分开设计的思想,内环设计增稳回路,外环实现航迹倾斜角控制,其控制结构如图2所示。

图2 纵向航迹倾斜角控制器结构
图2中,驾驶员指令直接控制航迹倾斜角γ,反馈信号采用俯仰角速率q和航迹倾斜角γ。其中内环由姿态阻尼回路构成,以改善长周期浮沉运动模态的阻尼。
由于推力调节容易激发长周期震荡,因此长周期阻尼是内环设计的主要目标。以巡航状态点为例,可画出如图3所示的内环系统的根轨迹,在保证稳定性的前提下,使长周期一对小的共轭复根远离虚轴,此时得到的反馈增益Kq为150。
引入增稳回路后,长周期模态的一对小的共轭复根变化为-0.046 2±0.055 3i,长周期阻尼从0.051变为0.641,有效抑制了长周期振荡。
在内环增稳基础上,外环设计PID控制器,以实现对航迹倾斜角指令的准确跟踪。
4.2PCA横航向滚转角控制

图3 纵向阻尼回路根轨迹
采用与航迹倾斜角控制类似的控制结构,滚转角控制结构如图4所示。由于差动推力容易激发荷兰滚模态,因此荷兰滚阻尼是内环设计的主要目标。图4中,内环反馈信号采用侧滑角β、滚转角速率p,用于改善荷兰滚阻尼。引入p反馈,也可直接改善稳定性。驾驶员输入滚转角指令Δφc,并通过调节滚转角Δφ,达到控制航迹方位角Δx的目的。

图4 横航向滚转角控制器结构
内环反馈增益的选取同样采用根轨迹的设计方法,侧滑角反馈增益取10,滚转角速率增益取-0.11,此时荷兰滚的一对复根变为-0.238 3±0.992 5i,荷兰滚阻尼从0.071变为0.233。外环设计PID控制器,即完成滚转角的控制。
4.3基于PCA的自动着陆系统设计
当飞机舵面失效后,如何实现安全迫降是对PCA系统的严峻考验。典型的飞机着陆过程分为四个阶段:初始进场阶段、坡度下滑阶段、拉平阶段和地面滑跑阶段。假定飞机已经对准跑道中心线,并处于初始进场阶段的定高平飞状态。
对于正常飞机,下滑段初始高度为400m,速度为70m/s,并沿着-3°的下滑轨迹下滑。拉平高度选为20m,当飞行高度达到0m时,飞机触地,进入滑跑阶段。由于飞机常规舵面失效,着陆时并不能降至理想速度,因此初始速度选择为120m/s。下滑过程中由于飞机垂直下降速度过大以及发动机响应的大延迟特性,因此拉平高度提高到50m,以避免接地速度过大造成事故。
本节采用了与仪表着陆系统耦合的着陆控制器设计方法[6],由波束偏差角和高度信号解算出飞机航迹倾斜角、滚转角指令,输入到PCA控制系统,从而实现了推力控制下的自动着陆。
5仿真分析
为验证本文控制系统的有效性,以波音747-100飞机为对象进行了仿真分析。
巡航初始状态为:高度H=8km,速度V=250m/s,迎角α=2.639 6°,发动机压比EPR=1.162 3。给航迹倾斜角施加幅值为1°的矩形指令,响应曲线如图5所示。
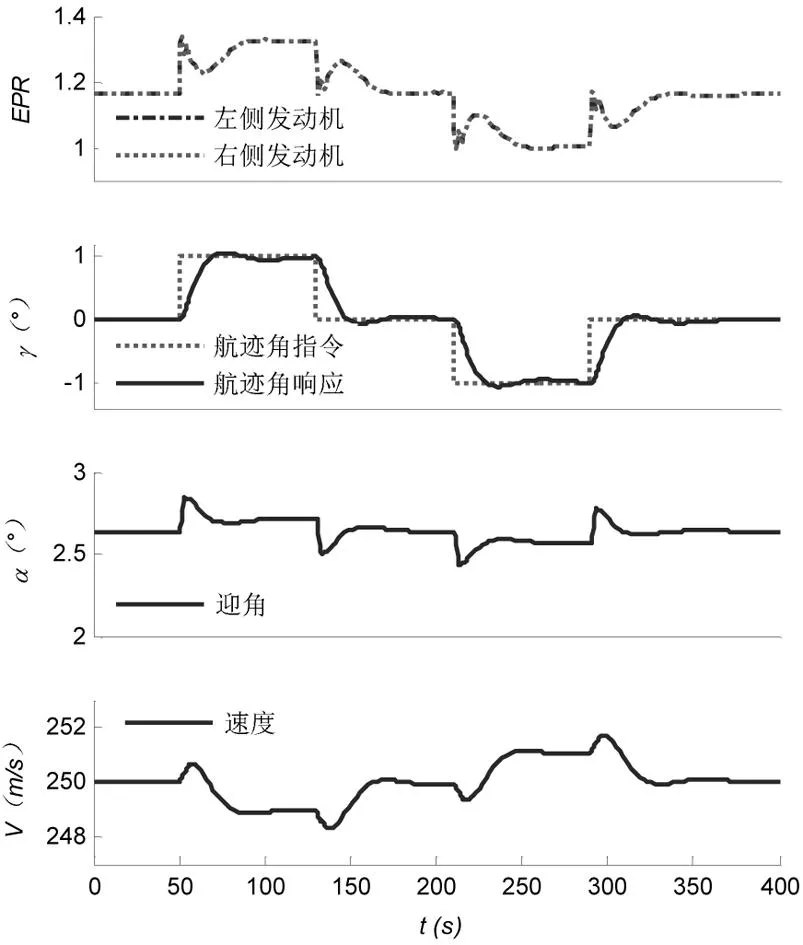
图5 纵向航迹角控制响应曲线
图5中,航迹角γ能准确跟踪指令信号,其响应时间(指令的63%)为9.92s,上升时间12.5s,超调量为5.85%,同时速度变化、EPR均保持在一个较小的变化范围内。
在同样的状态点,给滚转角施加幅值为20°的矩形指令,仿真结果如图6所示。
图6中,滚转角响应时间为9.57s,上升时间9.21s,有微小超调。偏航角速率与滚转角近似成正比,因此控制了滚转,也就实现了偏航角的控制。此外,在PCA自动着陆仿真中,选择初始状态为高度H=400m,速度V=120m/s,迎角α=6.383 2°,发动机压比EPR=1.068。图7给出了自动着陆过程中高度H、速度V、航迹角γ和EPR的仿真结果。

图6 横航向滚转角控制响应曲线

图7 PCA自动着陆响应曲线
由图7可知,飞机初始状态为定高直线飞行,进入下滑段后,飞机跟踪指定航迹角γ需要一个缓慢的过渡过程,下滑过程波束偏差角最大为0.375°,轨迹跟踪效果较好。仿真结果显示,接地速度为-0.718 8m/s,接地加速度为0.061 2m/s2,控制效果较好。由于飞机速度较大,所以PCA迫降过程需要配合使用发动机反推和机轮刹车,也需要较长的跑道支持。
6结论
大型飞机在操纵舵面失效的情况下,仅靠调节发动机对称/差动推力可提供一定的控制能力,PCA轨迹控制和PCA自动着陆是可以实现的,其长周期震荡和荷兰滚模态能得到有效抑制。但是发动机的延迟特性,会导致飞机动态特性慢于正常情况。
在飞机舵面丧失的同时,往往伴随飞机外形结构的变化,因此针对模型不确定性、未建模动态以及风扰动等问题还需要寻求更好的解决办法。
参考文献:
[1]Yoshitsugu Hitachi. Damage-Tolerant Flight Control System Design for Propulsion-Controlled Aircraft [D]. Toronto: Aerospace Science and Engineering University of Toronto, 2009.
[2]袁锁中. 基于H∞模型匹配的应急飞行控制研究[J]. 飞行力学, 2001,19(1):85-88.
[3]John Bull, Robert Mah, Gordon Hardy, etc. Piloted Simulation Tests of Propulsion Control as Backup to Loss of Primary Flight Controls for a B747-400 Jet Transport[R]. NASA,1997.
[4]Frank W. Burcham, Jr. Manual Manipulation of Engine Throttles for Emergency Flight Control[R]. NASA/TM-2004-212045,2004.
[5]John J.Burken Trindel A, Maine Frank W.Burcham, Jr. Longitudinal Emergency Control System Using Thrust Modulation Demonstrated on an MD-11 Airplane [R]. AIAA-96-3062, 1996.
[6]《飞机设计手册》总编委会.飞机设计手册第12册:飞行控制系统和液压系统设计[M].北京:航空工业出版社,2003:398-405.
The Study of Emergency Flight Control System on Propulsion Controlled Aircraft
唐志帅刘兴华 /
Tang ZhishuaiLiu Xinghua
(上海飞机设计研究院,上海201210)
(Shanghai Aircraft Design and Research Institute, Shanghai 201210, China)
摘要:
推力调节(Propulsion Controlled Aircraft,以下简称PCA)应急飞行控制作为一种替代的控制策略,能够通过仅调节发动机推力,对常规操纵舵面失效的飞机提供一定的控制能力。首先从动力学角度对推力调节的可行性进行了分析,并在此基础上建立了PCA总体方案,然后采用内环增稳、外环设计PID控制器的方法,完成了PCA纵向航迹倾斜角控制器、横航向滚转角控制器的设计,仿真结果表明利用推力调节实现航迹控制是可行的。最后将所设计的控制器应用于自动着陆系统,飞机能够准确跟踪航迹,满足性能要求。
关键词:推力调节;应急飞行控制;自动着陆
[Abstract]As an emergency control strategy, PCA (Propulsion Controlled Aircraft) provides certain control ability using throttle modulation, while the conventional flight control system fails. This thesis makes a feasibility analysis of PCA from the view of dynamics and establishes the overall architecture of PCA. Based on PID , the design of longitudinal and lateral controller of PCA is completed. The results show it is feasible to realize the control of landing trajectory. The designed controller is also used in automatic landing system and meets the performance requirements while the aircraft can accurately track the landing trajectory.
[Key words]propulsion controlled aircraft; emergency flight control; automatic landing system
中图分类号:V228
文献标识码:A
