车载LIDAR技术在高速公路扩改建中的应用研究
2016-04-21刘志成
■刘志成
(新疆维吾尔自治区交通规划勘察设计研究院新疆乌鲁木齐830006)
车载LIDAR技术在高速公路扩改建中的应用研究
■刘志成
(新疆维吾尔自治区交通规划勘察设计研究院新疆乌鲁木齐830006)
大规模的高速公路改扩建已成为我国公路工程建设中的一个热点。传统全野外的测量方式来获取高速公路中央及每各个断面测量数据对测量人员的人身安全构成了重大隐患。同时,考虑到传统全野外的测量周期长以及人力物力高成本的经济投入,难以适应当前大规模增长的高速公路及城市路网改扩建需求。车载LiDAR(Light Detection And Ranging)技术应运而生,对提高效率和节约成本具有重大意义。车载激光测量系统可以快速采集公路三维信息,包含点云坐标、属性信息、影像数据等,点云具有精度高、信息丰富等特性,满足道路新建、改建、扩建、维护等工程对专业测量的高效、精确、快速、安全等日益迫切需求。
车载激光扫描滤波
0 车载激光扫描系统分析
LIDAR(Light Detection And Ranging)扫描技术的测量原理是基于角度和距离测量的几何数据获取方法。其过程是:从传感器上发射的激光信号被地面目标反射后,被LIDAR扫描系统上的接收单元接收,根据发射和接收之间的时间差,可以计算出传感器与地面目标之间的距离,依次扫描被测区域,快速获得地面景观的二维坐标和反射光强。
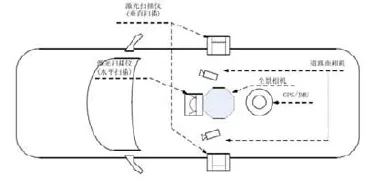
图1 车载Lidar系统集成图
系统运行过程中可以同步完成各传感器的数据获取与存储,包含GPS和IMU的定位定姿数据、里程计的行驶数据、激光扫描仪的激光脉冲数据和面阵相机的影像数据,如图1。系统工作时,以GPS时间为主导保证时间的同步和协调,激光扫描仪获取扫描中心到被探测目标物的距离和点之间的角度变化信息,来计算目标点在激光坐标系下的坐标。而激光扫描中心与GPS/INS(Inertial navigation system)导航系统之间的空间位置关系己经提前检校好,且激光扫描仪与GPS/INS导航系统之间通过GPS时间戳进行精确时间同步,最终可确定实测目标点的大地坐标。
1 基站架设与靶标布设
为了控制激光扫描数字地面模型的精度,以及便于检查生成的数字地面模型的精度,需要在道路周边进行地面数据采集工作。地面数据采集包括:为配合航空数据采集布设基站以外,还在地面布设并测量了地标点、路基外侧一定数量的地形点和路面部分一定数量横断面上的点位。具体布设方案如下:
(1)地面靶标点按平行于高速公路道路方向分四排布设,道路两侧路肩各布设一排,道路两侧距路边约150米范围内各布设一排,地标点间距约500米,两侧呈交叉布设,喷涂白色油漆作为靶标。
(2)高速公路沿线的特征地物点的布设。如公路的急转弯点,路旁建筑物的四角,路灯底部,交通标识底部,立交边缘等。可以确保所布设的靶标控制点和检查点可以在点云中清晰而准确地识别,从而提高点云数据精度和提高作业效率。
(3)地面靶标点和地面控制点测量采用静态GPS测量,按四等GPS测量要求进行观测。高程采用四等水准方法测量,组成闭合或附合水准测量网。散点、边坡点和路基外横断面点,这些点的平面坐标和高程均使用GPS-RTK方法测量,测量散点坐标还同时测量了地面散点所处位置的植被高度。
2 激光点云滤波处理
由于LiDAR数据是随机的采集数据,在三维空间中呈现不规则、离散的状态,也被称为LiDAR“点云”,这些点云中部分点是真实地面的点,部分点是地物点(屋顶、树木、电线等),极少数是既不属于地物点也不属于地面点的点。在进行LiDAR数据处理时,一个必要的前提就是给定一个规则来区分地面点和非地面点。LiDAR点云的滤波就是要从原始的LiDAR数据中滤掉非地面点,保留有效的地形信息。
滤波是处理LiDAR数据的关键。滤波算法的基本原理是基于局部地形的连续性变化这一个假设,算法设计的关键在于如何快速准确的检测出局部的高程突变。滤波的算法比较多(如:移动窗口法、形态学滤波法、迭代线性最小二乘内插法、高程纹理分析法、基于地形坡度滤波法等)。
迭代线性最小二乘内插滤波法是常用的一种算法,其核心思想是:地物点的高程比对应区域周围地形点的高程高。内插后激光脚点高程与拟合面的拟合残差不服从正态分布。地物点的拟合残差都为正值,且偏差较大,对应地面点的拟合残差较小且可能为负值。该方法需要迭代进行,首先按所有点等权的方式计算激光脚点在窗口内的高程均值或使用先验的估值,并将其作为初始拟合表面模型,该表面实际上是介于真实地面(DTM)和植被覆盖面(DSM)之间的面。然后计算各激光脚点高程值和拟合面的残差V,根据残差对每个点计算权重P其权函数关系式(1-1)为:

式中:参数a和b决定了权函数的变化幅度,通常a、b取1和4;参数g选择一个合适的负数,其值可根据残差统计直方图确定。
计算出每个观测值的权P后,就可进行下一步的迭代计算。依据是:残差负的越多,其对应激光脚点赋予更大的权;对于居中残差的点赋予较小的权;对于残差大于g+w的数据点就认为是地物点,赋予零权重,将其剔除掉。然后,对定权的各个脚点进行判断,权重大的点就认为是地面点,权重小的点就是地物点,如此计算出新的拟合表面模型。最后,对新拟合表面模型重新计算被剔除点的残差,如果残差落在本次吸收域g+w内,则在前一次拟合中判定为非地形点而被剔除的点,可重新被吸收为地形点,参加新的拟合计算。如此反复迭代,直到满足最终条件为止,流程图见图2。
3 测量精度控制
此次试验选取的线路位于新疆某高速改矿建工程中段,选择里程50km至80km的30km范围路段进行测试。采用WGS84坐标系和高斯三度带投影,中央子午线移与高速工程坐标系保持一致。首先选择并设立控制网,主要用来求取系统的初始参数。控制网新疆某高速沿线布设,测量并选取60个控制点的坐标值做精度比对真值。然后,利用车载激光测量系统对控制网内进行了扫描,并对扫描结果进行了精度检测。点云精度数据统计如表1,
同时,在新疆某高速扩改建工程里程50km至80km处进行了数据采集,并选取了167个检查点,精度检测结果如表2。
试验数据的精度检测结果表明,在GPS信号良好和人工因素干扰较少的情况下,系统成果完全可以满足1:2000比例尺成图要求,也符合公路改扩建工程的精度需求。
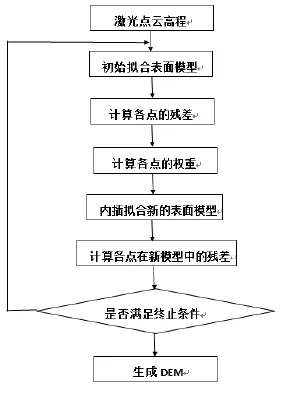
图2 迭代线性最小二乘内插滤波法流程图

表1 控制 査点精度检 统计表
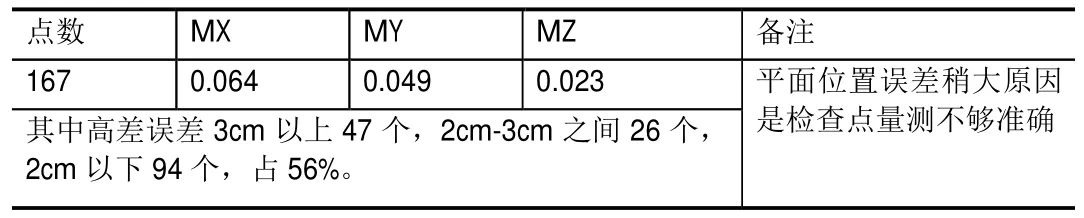
表2 检查点精度检查统计表
4 应用及展望
项目依托新疆某高速公路改扩建工程,对车载移动扫描测量系统进行应用研究,通过对平面控制点、高程检验点以及激光扫描测量点等数据的检验,对实验数据进行处理以及误差分析,得出相关实验结论。根据对实验结论的分析,本项目的研究成果达到了技术考核指标要求,试验数据的精度检测结果表明,在GPS信号良好和人工因素干扰较少的情况下,系统成果可以满足1:2000比例尺成图要求,也符合公路改扩建工程的精度需求。
车载激光测量系统正是由于其高效、高精度、信息量丰富和节约成本等特点所以发展前景良好。精度高的特点使其能应用于各种高要求的测量领域,点云数据匹配影像数据的应用方式增加了点云模型的直观性和利用价值。在老路改扩建工程中应用,亦仅需测量人员进行少量辅助外业测量工作,同样一次测量可以满足道路改扩建线路设计初测和详测需求,由于后期的数据处理成本低,能降低测量成本。如果推广到其他行业如规划、电信、公安、导航、军事等,将会带来巨大的经济效益。
[1]袁夏.三维激光扫描点云数据处理及应用技术.南京:南京理工大学,2006.
[2]赵永国,黄文元.地面三维激光扫描技术与公路工程的试验研究 [J],中外公路, 2009(08).
[3]公路勘察规范JTOC10-2007.
[4]谢向进.三维激光扫描用于公路勘测的可行性分析 [J].地球,2014:234-235.
U46[文献码]B
1000-405X(2016)-6-479-2
刘志成,男,硕士,研究方向为交通勘测与3S技术研究与应用。
