基于对固定目标保护的多站转发式欺骗干扰研究
2016-04-20万有达马鹏程聂俊伟孙广富
万有达,马鹏程,聂俊伟,孙广富
(国防科技大学电子科学与工程学院,长沙 410073)
基于对固定目标保护的多站转发式欺骗干扰研究
万有达,马鹏程,聂俊伟,孙广富
(国防科技大学电子科学与工程学院,长沙 410073)
摘要:针对对固定目标保护的转发欺骗干扰布站方式,提出了一种工程上可实现的基于时延控制的多站转发欺骗干扰布站方式,并研究了该布站方式具体布站位置设置,转发器高度角,有效干扰区域半径以及在该高度下真实点与虚假点构成映射的邻域半径关系,解决了传统单站布站方式条件下转发器位置限制问题,并实现对固定目标的保护。仿真结果表明,这种布站方式可以在地面中控站每秒更新一次的条件下将每次更新的时延控制在10(-7)秒量级层面上。该方法在导航战背景下针对未态精确制导武器可有效进行欺骗干扰对实现固定目标保护有重大意义。
关键词:GNSS;转发式欺骗干扰;多站方式;平流层;时延控制。
0引言
随着卫星导航系统在军事领域应用上的不断推进,“导航战”应运而生,其目标主要是基于美国提出的3P理论:保护、阻止、保持理论。导航战中,欺骗干扰无疑是实施攻击的主要方式。文献[1]和[2]明确提出了几种基于地面发射器欺骗单个目标和多个目标的方式方法,可以使车载接收终端产生错误的定位信息和运动轨迹。面对潜在的军事威胁,若能掌握对军用信号的欺骗方法,不仅可以对现代战争中广泛使用的精确制导武器形成威慑,限制敌方的打击能力,降低敌方作战效率,更有可能使敌方武器装备为己所用,对敌实施打击。
工程实现层面上,文献[3]首先提出了主控站把时延注入干扰机,能在不改变自身位置对目标进行成功诱导的实现设想。文献[4]中则阐述了通过单个干扰站同时转发多颗卫星信号,地面控制站控制转发信号时延大小,实现区域映射诱导的设想。但其局限条件为转发站位置在以4颗卫星为焦点两两形成的单曲面的交点上,且时延控制要使卫星到转发站的距离差等于双曲面的实轴。文献[5]提出了一种基于时延精密控制的转发式欺骗干扰技术。利用数控延迟线设备通过对各路转发信号的精细时延控制,可以在目标接收机定位结果基本不变的条件下实现其输出定时结果的控制,从而达到拉偏授时接收机时间标准的目的。文献[6]中提出基于地伪卫星的分布式转发以及文献[7]提出的系留气球载GPS干扰系统的实现方式,都因为其功能限制而存在明显的缺陷。文献[8]提出了以平流层飞艇为干扰载体进行压制干扰的设想,并论证其可行性。平流层飞艇巡航高度在20~25 km范围内,此范围内温度随高度变化较小,大气不对流,风速小,受力比较稳定,可以实现悬停。
综上所述,基于时延控制的转发式欺骗工程上已经具备了实现条件:转发器由飞艇搭载设定在平流层,结合地面控制站通过数控延迟线控制各个转发站的时延。但是单站转发其转发站位置受到严苛的局限条件限制,对转发站的位置精度也提出了更高要求。
本文提出一种精确可行的多站转发的布站方法,并给出针对其精度修正的方法及验证。该方法将四个转发器设在以R为圆锥顶点的倒圆锥同心圆上,克服了单站转发欺骗对转发器位置的严格限定,并根据真实点与虚假点构成映射的邻域半径比趋近于1的最佳条件给出了平流层范围内转发站高度。同时,还可以在转发器悬浮过程中不断更新调整自身位置,确保其位置的实时精确,更好的提高了欺骗干扰的有效性。
1系统模型
因为本文提出的方法的目的是有效保护重要目标,所以只考虑欺骗干扰对应区域内武器的最终状态。在此条件下,进行系统模型的建立和分析。
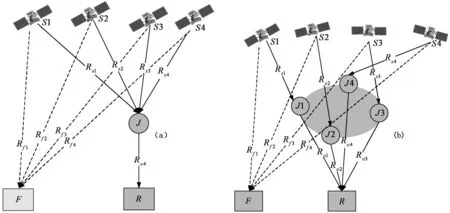
图1 布站方法 (a) 传统单站转发;(b) 多站转发
传统转发欺骗干扰布站方式如图1所示,基于该方式,提出将四个转发器设在以R为圆锥顶点的倒圆锥同心圆上的多站转发式欺骗干扰布站方式。图1示出了传统单站转发方法和本文所提出的一种精确可行的多站转发的布站方法。本文提出的多站转发式欺骗干扰布站方式:将四个转发器Ji(i=1,2,3,4)设在以R为圆锥顶点的倒圆锥同心圆上,卫星i到转发器i的距离由Rsi表示,转发器i到真实点R的距离由Roi表示,卫星i到虚假点F的距离由Rfi表示。
2算法分析
基于时延控制的多站转发式欺骗的原理就是控制各个卫星到接收机的时延,使目标生成错误的定位方程,引导其到达错误的位置。首先,根据GNSS卫星定位的基本原理,伪距计算公式为
ρi=[(Xi-X)2+(Yi-Y)2+(Zi-Z)2]1/2+
c×Δtd.
(1)
不失一般性,假设接收机接收4颗卫星的信号。那么Xi,Yi,Zi(i=1,2,3,4)为各个卫星在地心系中的坐标,对接收机是已知的,Δtd为接收机时钟和卫星时钟的时差,以及武器接收机坐标(X,Y,Z)是4个待定参数。一般通过联立4个伪距方程组求出接收机自身位置。
加入转发器后,伪距变为Rsi+Roi+c×Δt,其中c×Δt是误差修正值。
Rsi+Roi+c×Δt=[(Xi-X)2+(Yi-Y)2+
(Zi-Z)2]1/2+c×Δtd.
(2)
(3)
两两作差,消去Δtd,对应所提出的布站的方式,应有Ro1=Ro2=Ro3=Ro4,该方程为

(4)
四个转发器设在以R为圆锥顶点的倒圆锥同心圆上,随着转发器位置的移动,Rs会沿着圆锥母线变化,这样就很容易计算其精度变化。这样的布站方式就保证了4个转发器到真实点距离相同,这样Roi是一致的,方程中可以消去Roi这个量。方程变为
(5)
同时可以注意到,虚拟点位置不变时,假定地面中控站更新转发器时延一秒一次,因为卫星坐标在一秒内改变很小,Rfi-Rfi+1是一个常数,不妨设Rfi-Rfi+1=Ci且c×(∂ti-∂ti+1)可控,设其为Di.方程可以变形为
(6)
其中,
修正后的转发器坐标为[x+Δx,y+Δy,z+Δz],如此迭代更新若干次,可以更新到相应的精度。
值得注意的是,研究真实点虚假点邻域半径比的意义主要在于能否做到Rr=Fr,即Fr/Rr=1或者Fr/Rr→ 1,因为现有的欺骗干扰检测的方式主要分为信号参数门限的数字检测和基于惯性导航的物理检测。转发式欺骗检测在信号格式上没有进行任何改变,所以其抗欺骗检测的侧重点应该是针对抗惯导的检测。如果能够做到Fr/Rr→ 1,那么就可以更好地应对接收机基于的惯性导航的检测,从而大大提高欺骗干扰的成功率。
虚拟点周围的邻域半径F,真实点R的邻域半径不妨定义为


(7)
则首先针对真实点R周围以一个设定半径作圆,定为R的邻域。因为求某一时刻的F邻域,R与F满足前文方程给出的映射关系,那么R邻域中的一点设为R′,对应的F中的F′,研究邻域变化前提为时延不变,所以c×(∂ti-∂t(i+1)),i=1,2,3不变。在R的邻域已知的情况下,通过假设F′的三维坐标,求解方程组(4),即可得到R邻域半径与F′的邻域半径关系。
3数据结果
因为转发器设置的先决条件是悬浮在平流层,根据气象学中纬度地区平流层的区域划分设置和当前飞艇悬浮高度的工程实际,转发器高度设置值应在[10,30]km范围内。根据前文数据,真实点Ri的坐标为(2 190,5 180, 2 996),通过设置Ji的坐标变化进行实验。实验设置Ji的坐标分别为[2 178.4,5 180,H],[2 201.6,5 180,H],[2 190,5 191.6,H],[2 190,5 168.4,H]。其中H的值分别取3 006,3 016,3 026.
调整转发器高度参数,其余参数不变情况下,Fr/Rr变化情况如图2所示。
图2 转发器高度参数与真实点虚假点领域半径比关系
由图2可知,转发器设置悬浮高度在离地面20km,真实点邻域半径为20km时,最可能实现Fr/Rr=1的最优化。所以转发器设置的高度最优选择应为平流层中距离地面20km的高度。
以长沙为例,由其经纬度求得其地心系坐标为:[2 190,5 180,2 996]。即R[2 190,5 180,2 996],F[2 160,5 150,2 996],假定不考虑地表曲率,F与R水平X,Y坐标各差30km.R上空20km布置的转发器形成圆锥地面圆心坐标为[2 190,5 180,3 016]。同时选取角度较好的4颗卫星,其地心系坐标通过RINEX读取分别为Si,四个转发器位置可以假定为均匀分布,则J的位置分别为Ji,如表1所示。
表1示出了实验所用的四颗卫星的地心系坐标和四个转发器的地心系坐标,后续的数据实验仿真将以这组数据为基础进行。时延仿真结果如表2所示。
表1卫星编号及转发器编号对应的地心系坐标表

No.SiJi1[9393.9,9393.9,23010][2178.4,5180,3016]2[11504,19928,13285][2201.6,5180,3016]3[13283,13286,18788][2190,5191.6,3016]4[9392,16271,18784][2190,5168.4,3016]
表2 四个转发器对应控制的时延
表2示出了在假定地面中控每秒更新一次时延数据的情况下,实现的时延控制数值都在10-7量级层面上,其相对更新周期而言数值非常小,可以达到预期精度指标。同时基于该文的布站方式,转发器分布平面示意图如图3所示:
图3 转发器分布平面示意图
图3示出了基于提出的布站方式下转发器分布的平面示意图,从几何关系入手能够很好地表示出每个转发器Ji(i=1,2,3,4)的有效干扰半径,从而进行多站转发有效干扰半径的计算。
因为R为地球半径(6 370 km),h为接收机高度,δ为高度角,转发器高度为H,有效干扰半径为r为
(8)
根据实验,不难发现在高度角变化其他条件不变的情况下,高度角δ越大,单机干扰半径越大。针对高度角δ为45°和75°时进行实验,实验结果如图4所示,黑色区域为有效干扰区域。
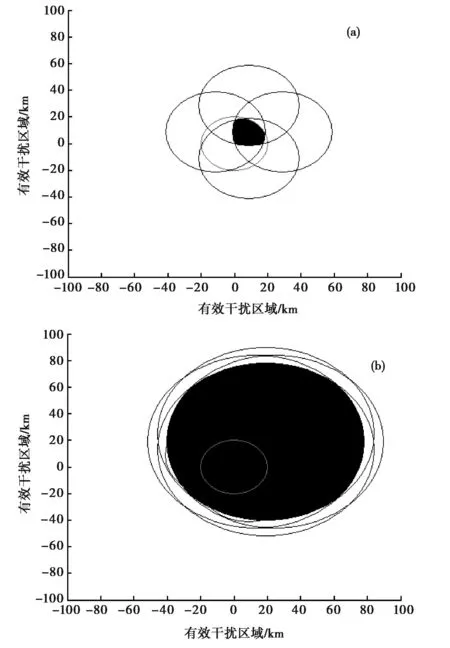
图4 高度角δ对多站欺骗有效干扰区域半径的 影响示意图 (a)δ=45°;(b)δ=75°
图4示出了高度角对多站欺骗干扰有效区域半径的影响,图4(a)示出了高度角较小(δ取45°)的情况,图4(b)示出了高度角较大(δ取75°)的情况。显而易见,高度角较小时,转发器分布相对不紧密,由于各转发器的重叠干扰区域才是多站转发的有效干扰区域,所以高度角较大情况下多站转发有效干扰半径较大。
该系统只是考虑武器最终状态。按照上述欺骗诱骗原理,敌方GPS制导的武器并不会落在虚拟点F,而是落在F′,如图5所示。
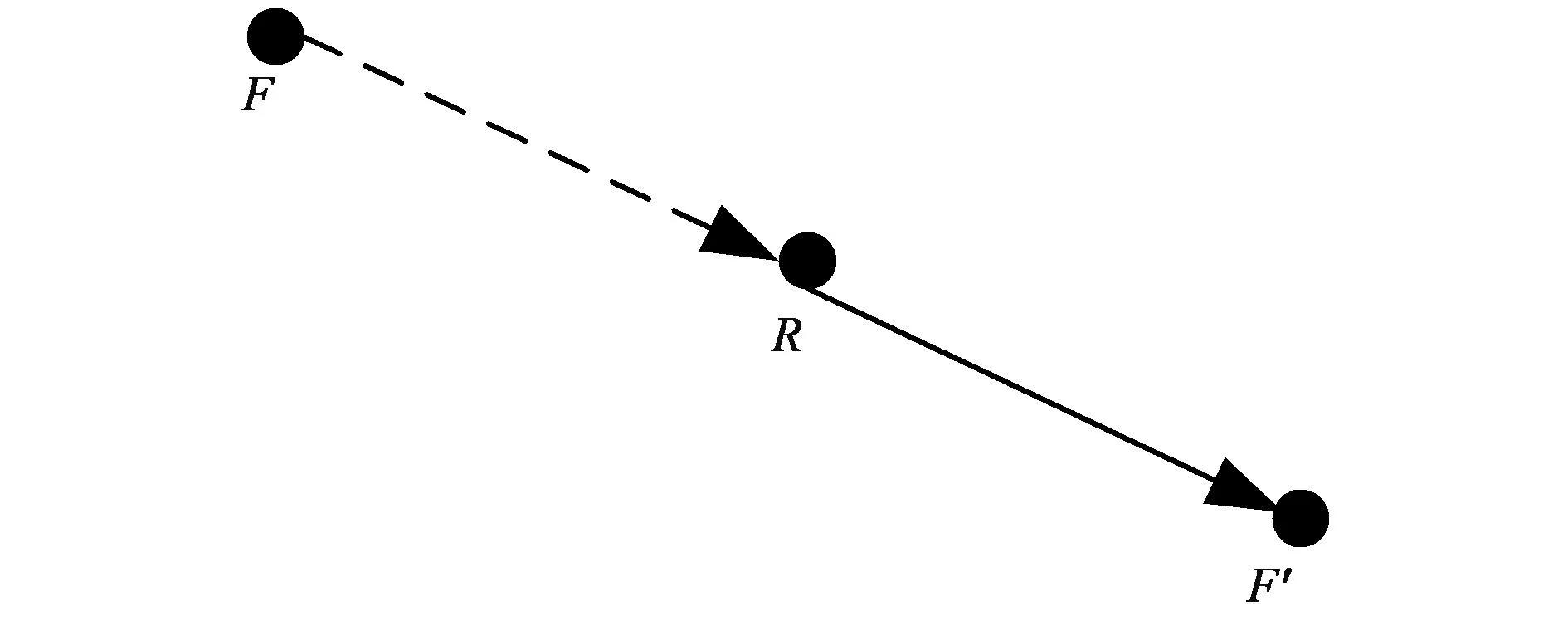
图5 GPS诱导系统下GPS制导武器运行轨迹示意图
当敌方GPS制导的武器到达其既定目标点R时,由于接收到转发式欺骗干扰信号,其搭载的接收机定位结果现实当前位置为虚拟点F.因此该武器判定当前尚未到达目标点,仍需继续飞行,飞行方向为虚拟点F至目标点R的矢量,从而GPS制导武器将从目标点R运行至图中所示F′点。所以确保F′点周围是无重要价值的点的情况下,方案切实可行。
以某现役反辐射导弹为干扰对象建模,因为其低空情况下有效射程最大为25km,最大飞行速度为3马赫,所以结合设置的条件,带入H为20km,h约为2 000m,δ为75°,则单机有效干扰半径计算得r=65.83km.
由于4个转发干扰器控制分别4个时延,所以干扰区域的覆盖区域才是真正的有效干扰区域。不难发现基于该文的布站方式,其有效干扰区域半径为[59.65,65]km.
其最小干扰区域为59.65km大于真实点和虚拟点直线距离42.42km,所以全区域可以实现干扰。同时,该导弹如果以其最大速度3马赫每秒速度飞行,那么穿越区域时间(有效干扰时间)为116s左右。相比控制的时延数量级大了非常多,地面控制站1s更新一次时延数据,有足够的时间进行时延控制将其引导至虚假点,布站方案切实可行,
仿真测试转发器精度优化算法,假设卫星S和转发器J的地心系坐标如表1数据所示。通过前文描述的迭代更新精度算法,迭代两次后,相同条件下,单站转发和多站转发精度更新数值(单位km)如表3所示。
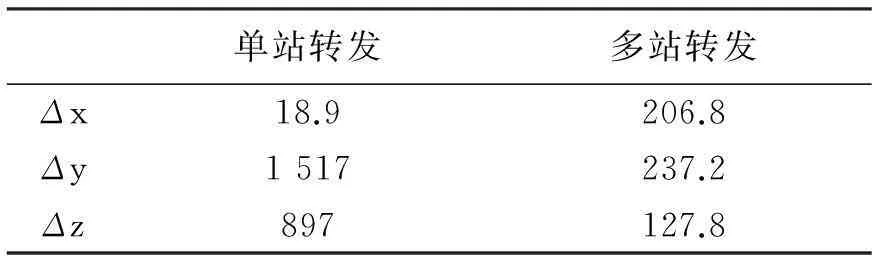
表3 单站转发欺骗干扰/多站转发欺骗干扰
显然,对于已经发射的平流层悬浮欺骗干扰转发器而言,单站转发需要更新的位置范围也只是理论上可行。相比之下,多站转发的精度位置更新范围小了很多,且只在一个很小的范围内变化,可实现性强,更贴近工程实际。
4结束语
本文提出了一种基于时延控制的多站转发欺骗干扰布站方式,研究了该布站方式条件下,具体布站位置设置,转发器高度角,有效干扰区域半径等参数的相互关系,与单站转发方式相比,摆脱了转发器位置严格限制的桎梏的同时,能够很好地完成时延控制精度优化。仿真结果显示,通过转发式欺骗干扰,实现时延控制,可以成功将敌方武器引导至预定位置区域,有效保护重要目标。
参考文献
[1]TIPPENHAUERNO,PPERC,RASMUSSENKB.OntherequirementsforsuccessfulGPSspoofingattacks[C].//ProceedingsoftheACMconferenceonComputerandCommunicationsSecurity(CCS), 2011: 75-86 .
[2]MCDOWELLEC.GPSspooferandrepeatermitigationsystemusingdigitalspatialnulling,U.S.A, 7250903[P].2007-07-31.
[3]杨景曙.通过区域映射实现诱导的GPS干扰系统[J].电子学报,2005,33(6):1036-1038.
[4]张颂. 通过单站转发实现诱导的GPS干扰系统[J].现代雷达,2010,32(9):19-22
[5]黄龙.GNSS接收机欺骗与抗欺骗关键技术研究[D]. 长沙:国防科技大学, 2013.
[6]王满喜, 李宏,马刈非.基于地基伪卫星的GPS对抗方法研究[J].飞行器测控学报,2007,26(4):76-80.
[7]方佳棉, 系留气球载GPS干扰系统的设计 [J].舰船电子对抗,2008,31(5):28-31.
[8]马丽, 刘飞,杨建军.平流层飞艇载GPS干扰器能力及部署分析[J].现代防御技术,2012,40(5):62-65.
[9]PAPADIMITRATOSP,JOVONOVICA.OnprotectionandfundamentalvulnerabilityofGNSS[C].//IEEEInternationalWorkshoponSatellite&SpaceCommunications,2009.
万有达(1992-),男,江苏无锡人,硕士生,主要研究方向为GNSS欺骗干扰。
马鹏程(1992-),男,山东日照人,硕士生,主要研究方向为导航信号处理。
聂俊伟(1983-),男,山西忻州人,博士,讲师,主要研究方向为GNSS抗干扰。
孙广富(1970-),男,黑龙江巴彦人,教授,博士生导师,主要研究方向为卫星导航信号接收技术。
Study of Multi-Station Retransmission Spoofing Methods Based on Protection of Fixed Target
WAN Youda,MA Pengcheng,NIU Junwei,SUN Guangfu
(SchoolofElectronicScienceandEngineering,NationalUniversityofDefenseandTechnology,Changsha410073,China)
Abstract:The station-setting retransmission spoofing methods based on protection of fixed target is considered. Previous techniques in this area are single retransmission station based and the station's geography coordinate is restricted in a certain limitation seriously. In this paper, we propose an engineering-doable multiple stations retransmission spoofing manner based on time delay control. Then make analysis on the correlations of distribution parameters and the neighbourhood radius between the reality position and fake position at the distribution height. With this distribution method not only overcomes these problems but also achieves the goal of immovable target protection. Numerical results show that under the circumstance that the ground control center updates the time delay per second, the method controls the time delay within 10(-7) s grade which proves it feasible to protect the important target by using retransmission spoofing method to final accurate guiding based weapons under the circumstance of navigation warl.
Keywords:GNSS; retransmission spoofing; multi-station; fixed target protection; delay control
作者简介
中图分类号:P228.4
文献标志码:A
文章编号:1008-9268(2016)01-0060-06
收稿日期:2015-12-05
doi:10.13442/j.gnss.1008-9268.2016.01.011
联系人: 万有达 E-mail: milk_da@qq.com
