基于自主导航微终端的卫星导航深耦合技术及应用*
2016-04-15肖胜
肖 胜
(海军驻中南地区光电系统军事代表室 武汉 430223)
基于自主导航微终端的卫星导航深耦合技术及应用*
肖胜
(海军驻中南地区光电系统军事代表室武汉430223)
摘要简要介绍卫星导航深耦合技术的概念、基本原理及应用,对常用的深组合方案进行分析比较,阐述了开展基于自主导航微终端的北斗卫星组合导航深耦合技术应用研究的必要性。
关键词自主导航微终端; 组合导航; 深耦合
Introduction and Application of Deep Coupling Technology of Satellite Navigation Based on Autonomous Navigation Terminal
XIAO Sheng
(Navy Representative Office of Optoelectronic System in Zhongnan Area, Wuhan430223)
AbstractThis paper briefly introduces the concept, basic principle and application of the deep coupling technology of satellite navigation, and expounds the necessity of the application of the integrated navigation system based on autonomous navigation terminal.
Key Wordsautonomous navigation terminal, integrated navigation, deep coupling
Class NumberP228
1引言
自主导航微终端(Mirco-PNT)与卫星导航系统的深度耦合技术,是指在卫星信号被遮挡或受干扰,用户接收机不能捕获或跟踪卫星的情况下,利用自主导航微终端的精确时钟和高精度惯性测量技术辅助卫星导航系统的数据进行估计、修正、融合,实现快速选星、捕获跟踪卫星信号,达到精确导航和定位的目的。同时,在用户接收机正常工作时,利用卫星导航系统的高精度授时和定位,校准原子钟的时间,修正微机电系统(MEMS)和微惯性测量单元(MIMU)的积累误差,提高微终端的授时和定位精度。
在现代高科技战争的背景下,自主导航微终端与卫星导航系统的深耦合技术能够实现不依赖任何外部信息和设施、不向外部辐射能量的自主式导航,抗干扰以及抗敌对破坏能力更强,隐蔽性更好,将会广泛地应用于军用飞机、水面舰艇、潜艇、战略导弹和战术导弹、战车、人造卫星等领域,有助于获得战场上的主动权。我国自行研制的北斗卫星导航系统已经成为世界上第三个成熟的全球卫星定位与通信系统,北斗卫星导航系统以及辅助导航技术,将会挑战美国GPS用户设备在全球市场垄断的地位[1~3]。
2国外发展现状及趋势
国外深耦合技术研究起步较早,从20世纪80年代开始,美、英、法等国的军方和民用部门开始研究惯性导航系统与GPS的耦合技术。Honeywell、Northrop、SALEM、TI、Litton等主要的惯性导航制造厂家,国际知名学者WillnerD、Speyer KerrT.H等,开始致力于惯性导航系统与GPS的耦合技术研究。国外普遍采用以下五种深组合导航技术方案[4~9]:
1) 常规模式
根据INS信息和GPS卫星星历计算载体相对GPS卫星的伪距和伪距变化率,与GPS接收机输出的伪距和伪距率作差,作为Kalman滤波器的测量信息,对INS的误差进行滤波估计,以提高GPS的精度。同时,校正后的INS速度信息用于辅助GPS码环锁相过程,增强了GPS接收机快速捕获GPS卫星信号和抗干扰的能力。
该方案原理简单,较易实施。但存在一个正反馈过程,容易导致系统不稳定。GPS接收机码环处于窄带状态,时间常数较大,跟踪误差和时间与INS的状态相关。而且Kalman滤波器的量测噪声是有色噪声,必须对有色噪声精确建模才能提高INS/GPS组合系统的性能。
2) 对码环跟踪误差建模
该模式是针对常规模式存在的问题提出的,即对有色噪声精确建模,并消除正反馈作用。相应于GPS接收机一阶或二阶码跟踪环,可建立一阶或二阶跟踪误差模型。
该模式的优点是提高了Kalman滤波器量测模型的精度,可改善INS/GPS组合系统的不稳定性,但没有消除问题的根源,且增大了计算量。
3) 解相关伪距法
该模式改变了GPS码环编排方式,添加了跟踪误差估计器来获得具有白噪声特征的量测残差,使得Kalman滤波器的估计结果最优,消除了跟踪误差相关问题,去除了Kalman滤波器不稳定的根源。其缺点是对GPS码环进行了重新编排,实施难度较大。
4) 滤波跟踪法
该模式取消解相关伪距法中的比例控制环节,使Kalman滤波器在估计INS与GPS误差的同时参与码环滤波,并将Kalman滤波器的最优估计结果作为初值提供给码环C/A码发生器。
该方案的优点是在获得理想量测输入的同时,增强了回路的抗干扰能力。但因取消了比例控制,动态跟踪性能较解相关伪距法稍差。
5) 码误差跟踪法
该模式用相关器控制回路取代码环,Kalman滤波器直接跟踪码误差,INS的伪距和伪距率分别加入C/A码发生器和驱动码数控振荡器NCO,Kalman滤波器的量测残差直接来自GPS接收机的相关检测网络。
该方案的优点是Kalman滤波器的量测输入取自伪距残差,消除了误差根源,根据量测残差的大小控制相关器的过零点,因而大大提高了系统对INS误差的容限。同时,Kalman滤波器被包在跟踪环路之中,带宽很窄,提高了系统对干扰的容限。
上述五种深组合模式中,常规模式是传统的做法,存在一定的缺陷。其他四种模式都不同程度地涉及GPS接收机内部的编排,甚至重新设计,实施难度较大。
目前,实际产品早已批量生产,是美国和其他北约国家军用飞机改装计划中的重点,其工作结果也较为理想。美国绝大部分主战飞机上,已经采用深耦合技术EGI(Embedded-GPS/INS)逐步取代单GPS接收机,并最终淘汰单GPS接收机。
美国McDonnell Douglas导弹系统部为其空对地导弹SLAM研制的深耦合制导系统,采用Rockwell Collins提供的单通道序贯P码接收机,并应用了SINS辅助GPS接收机技术。
2013年4月10日,美国国防部高级研究计划署(DARPA)的微定位导航授时技术(Mirco-PNT)项目研制的单芯片样机,包含6坐标轴惯性测量装置(3个陀螺仪和3个加速度计),并集成了高精度的主时钟,功率为1W。目前,该项目将微终端提供的精确时钟和惯性测量结合到了美国GPS中,研究内容与成果处于世界前列。
3基于自主导航微终端的卫星导航组合导航系统
该组合导航系统主要研究在卫星信号受干扰、遮挡、高动态等情况下,保证接收机输出导航数据的可靠、高精度。
1) 在高动态、遮挡、干扰条件下,出现卫星失锁的情况时,组合导航系统采用SINS辅助跟星的组合导航算法。基于MIMU辅助跟踪环路的深耦合算法框图如图1所示。
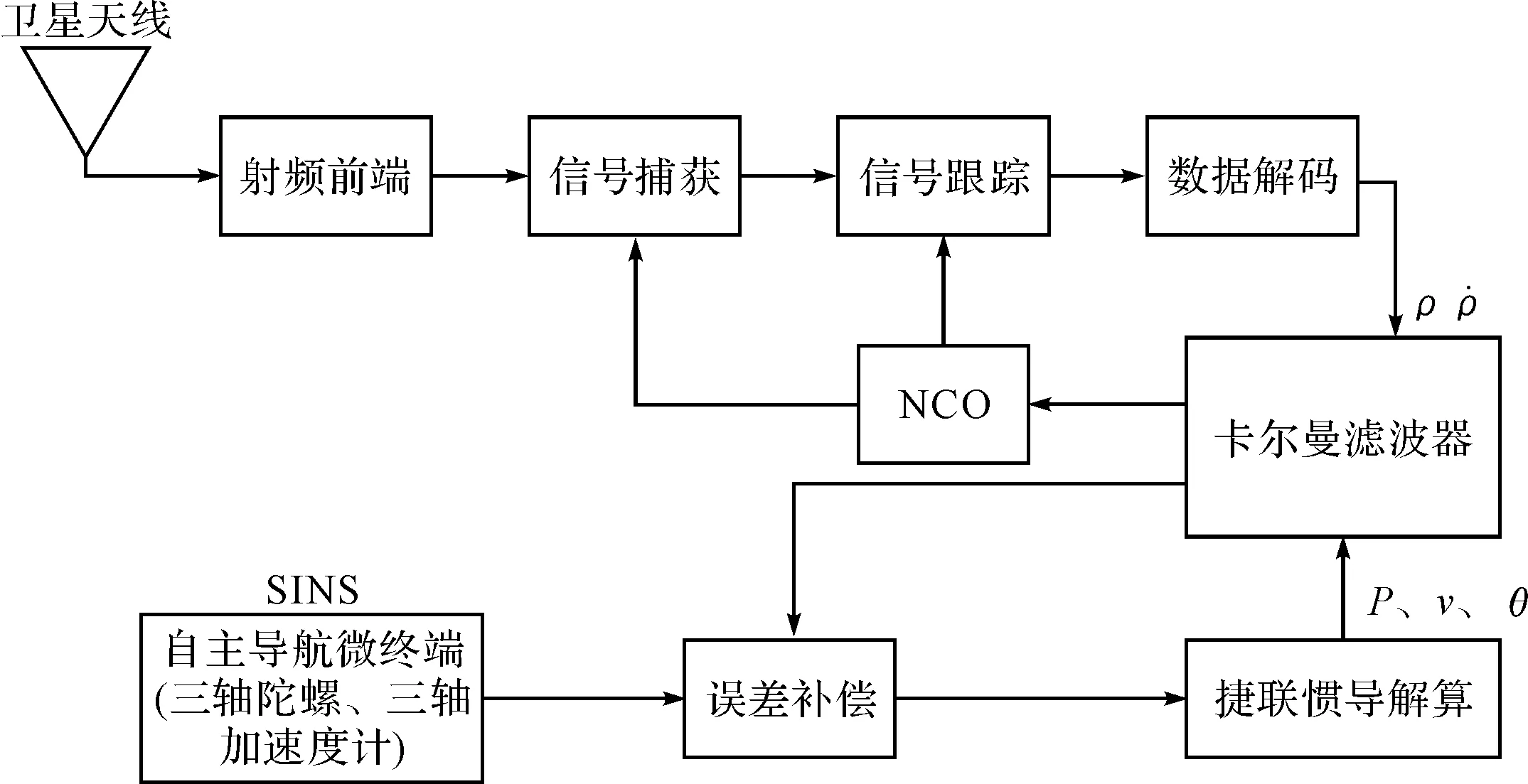
图1 基于MIMU辅助跟踪卫星的深耦合算法框图
一方面,MIMU测量得到的角增量、速度增量,经过误差补偿后,进行导航解算;另一方面,卫星接收射频信号,经过射频前端后进行捕获跟踪,当成功跟踪信号时,解析导航数据,将导航数据输入至卡尔曼滤波器进行最优估计,将估计得到的MIMU器件误差反馈回MIMU器件测量的误差模型中补偿,卡尔曼滤波后速度信息辅助捕获跟踪卫星信号,调整本地信号的产生,从而保持跟踪环路的稳定。
组合导航系统虽然可以依靠SINS进行不间断导航,但导航精度会降低。而采用SINS辅助跟星的组合导航模式可以提高导航精度,同时也提高了导航接收机的抗干扰能力。
2) 在卫星缺失条件下,组合导航系统采用组合增强设计算法。组合导航系统主要由卡尔曼滤波器、ANFIS系统和综合模块三部分组成,其原理框图如图2所示。
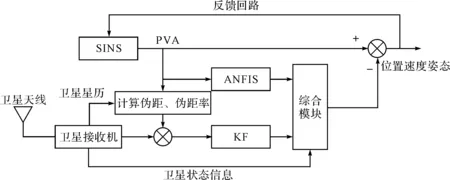
图2 基于ANFIS辅助KF的组合导航原理框图
卡尔曼滤波器以MIMU的误差方程和器件误差模型作为系统状态方程,以伪距、伪距率的MIMU估计值与卫星接收机测量值之差作为观测量,输入初始参数驱动滤波器对卫星/MIMU数据进行最优估计和误差估计。ANFIS系统能够较好地对于非线性系统进行建模,惯性导航是典型的非线性系统,因此利用训练数据建立模糊推理结构,采用神经网络训练模糊推理隶属度函数,使模糊推理系统稳定且满足精度要求,从而得到可用的ANFIS系统。该ANFIS系统对于输入的MIMU导航信息进行在线估计,输出导航误差。综合模块根据卫星状态信息对于卡尔曼滤波与ANFIS系统的输出信息进行加权计算作为导航误差的估计值,并且将导航信息通过反馈回路校正MIMU的导航解算,从而抑制惯性导航的发散。
实验表明该算法在卫星信号失锁100s内,仍能保持位置、速度精度不降低。
3) 当卫星信号恢复正常时,组合导航系统重新启用正常的卡尔曼滤波器进行深耦合组合导航设计。其设计框架如图3所示。
采用伪距误差、伪距率误差的深组合导航算法,该组合中没有单独的卫星信号跟踪环路,而是采用先进的矢量跟踪环(VDLL)结构与滤波器相结合,通过导航滤波器将每个信号通道融合为一体,从而实现通道间的信息交互。联合MIMU状态误差方程与卫星接收机相关的误差方程作为导航滤波器的状态误差方程:
误差方程:X=[XSINSXBD]T

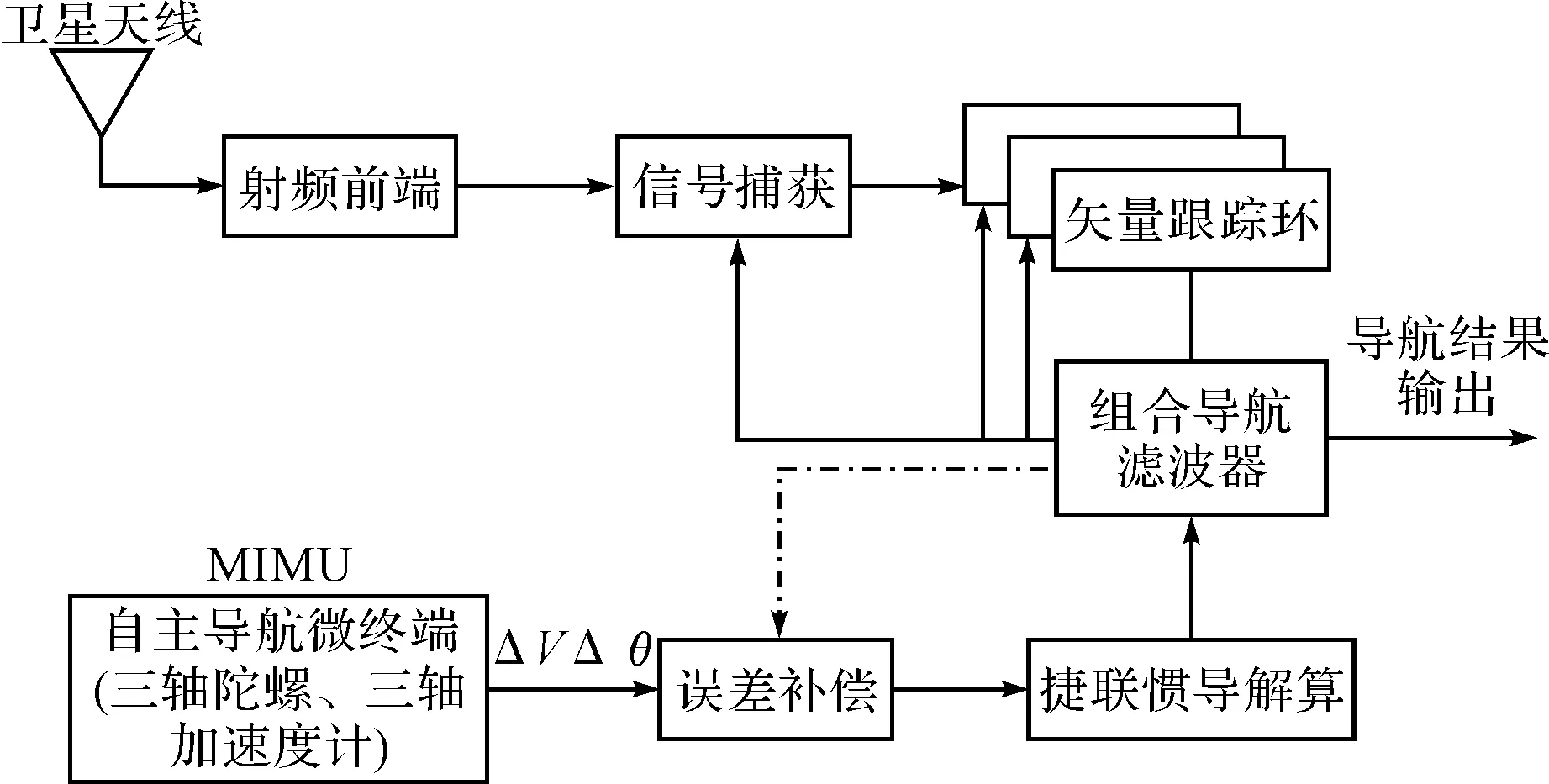
图3 深耦合导航系统结构图
4) 软件设计
模型建立后,采用高速的数字信号处理器(DSP 6000+系列)来完成导航算法的解算与数据处理,主要是导航解算、姿态矩阵的计算、坐标系的转换和导航算法的实现。软件结构流程如图4所示。
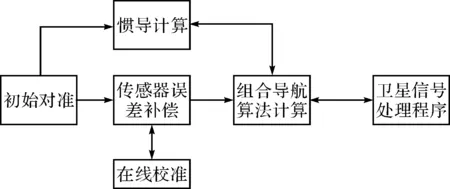
图4 基于微终端的卫星/MIMU组合导航系统软件结构图
在只能收到一颗卫星信号的情况下,采用改进的卡尔曼滤波算法,选择自适应卡尔曼滤波算法进行组合导航设计,该类算法可以减小卫星失锁导致的系统误差积累。当卫星提供的时间可用时,用其校准原子钟的时间;当卫星不可用时,为保证接收机有准确的时间,可使用原子钟提供的时间,解决了整个系统的授时问题。
4结语
导航系统深耦合方式作为导航系统组合的最优方法,有利于充分发挥各导航系统的优势,可以获得比单独导航系统更高的精度和更强的抗干扰能力,已成为目前导航系统发展的方向。而基于自主导航微终端的卫星导航深耦合技术,由于能更好地满足在局部战争中微型的精确制导武器体积小、成本低、生产周期短、打击目标准确率高、负面效应小、更高的可靠性和更强的抗干扰能力的要求,其工程化应用领域将逐步扩大。
我国对于导航微终端辅助北斗导航系统定位和导航的研究起步较晚,但潜力巨大,众多研究所和高校正在进行辅助导航系统的研究工作,主要表现为北斗导航系统与导航微终端的位置信息的组合,取得了初步成果。例如,在飞艇组合导航系统中,将低精度光纤陀螺和石英加速度计构造成惯性测量装置,应用于北斗组合导航,具有较高的导航精度和较好的抗干扰能力。因此,通过分析、借鉴国外INS/GPS深耦合系统的发展现状,在该领域取得突破,将有效拓展北斗卫星导航的应用范围,有着广阔的应用前景。
参 考 文 献
[1] 蒋庆仙.北斗/INS组合导航关键技术分析[J].全球定位系统,2010(6):56-60.
[2] 张雪.MINS/GPS组合导航系统的选星算法[J].舰船电子工程,2006,26(1):130-132.
[3] 戴邵武.北斗二代/SINS组合导航系统研究[J].全球定位系统,2010(1):25-29.
[4] 高法钦.无源北斗/高度组合导航自适应滤波算法[J].系统工程理论与实践,2011,31(2):345-350.
[5] 杨波.基于自适应滤波的飞艇组合导航系统研究[J].航天控制,2010,28(6):33-37.
[6] 周翟和.一种新的改进高斯粒子滤波算法及其在SINS/GPS深组合导航系统中的应用[J].控制与决策,2011,26(1):85-88.
[7] 戴邵武.北斗双星/SINS组合导航中捷联惯导算法研究[J].计算机与数字工程,2010,38(2):1-3.
[8] 高法钦.北斗一号/惯性组合导航算法的可控性分析[J].控制理论与应用,2011,28(4):538-547.
[9] 王旭.神经网络辅助的组合导航系统仿真研究[J].系统仿真学报,2011,23(2):242-244.
中图分类号P228
DOI:10.3969/j.issn.1672-9730.2016.03.015
作者简介:肖胜,男,博士,工程师,研究方向:作战指控,信息融合。
收稿日期:2015年9月4日,修回日期:2015年10月25日
