智能化汽车主动安全人机交互界面评价方法的设计理念研究
2016-04-13谢嘉悦
文/谢嘉悦 张 舒
智能化汽车主动安全人机交互界面评价方法的设计理念研究
文/谢嘉悦1张 舒2
本文对比了智能化汽车主动安全技术与传统汽车安全技术的不同,阐述了智能化主动安全技术的设计理念,同时设计和验证了简易固定式驾驶模拟器,可用于和指导智能化主动安全产品HMI的评价和优化。
智能化主动安全 人机交互界面 设计理念 驾驶模拟器
汽车安全技术的发展,已经由单纯的被动安全技术,向一体化安全发展。一体化安全技术的概念(见图1)融合了主动安全技术和被动安全技术,覆盖了从碰撞前10 s左右到碰撞后2 h的时间段。当前,被动安全技术的发展已经相当成熟,对降低道路交通死亡率做出了巨大的贡献,但该技术无法降低事故发生概率。随着汽车保有量的不断提高,交通事故的数量居高不下。主动安全技术可以防止事故的发生,如制动防抱死系统(ABS)、电子稳定控制系统(ESC)等在过去的30年中得到了长足的发展,已经逐渐成为现代汽车的标准配置,有效地降低了交通事故的发生率。
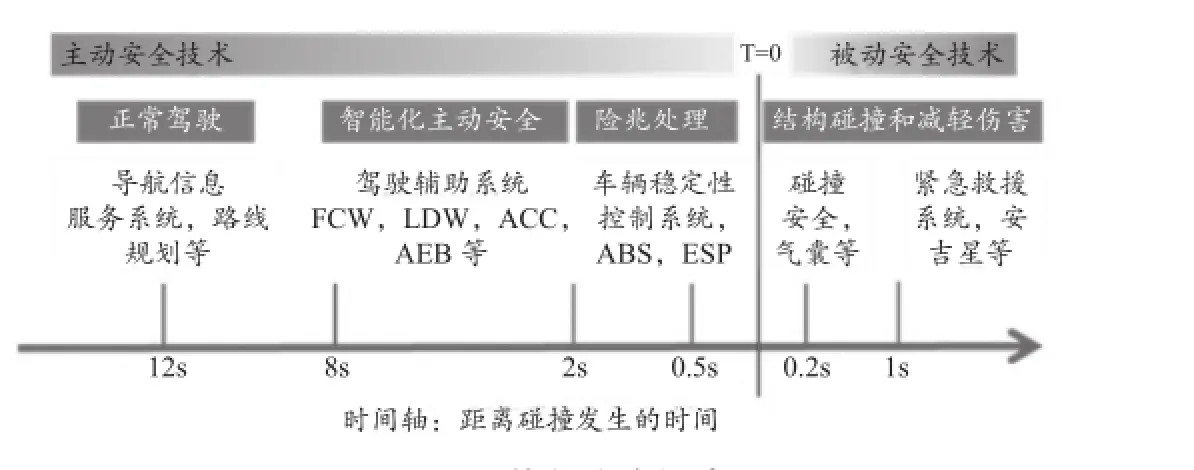
图1 一体化安全概念
一、智能化汽车主动安全技术发展现状
随着社会对汽车安全性能的要求进一步提高,该技术越发得到重视,各种更加先进、智能化主动安全产品层出不穷。如,前方碰撞预警系统(FCW)、车道偏离预警系统(LDW)和自适应巡航系统(ACC)等。此类智能化主动安全系统通过雷达或者摄像头等车载传感器实时捕捉和处理交通道路环境信息,帮助驾驶员识别车辆行驶过程中潜在的危险并提醒他们做出正确的反应,以提高驾驶的安全性。研究表明,90%以上的交通事故是由于驾驶员错误响应造成的。此类主动安全技术可以帮助驾驶员减少和纠正错误。因此,可以有效地提高汽车安全性和舒适性。
由于智能化汽车主动安全产品需要与驾驶员进行多方面的信息交互,故它的设计具有特殊性。设计良好的智能化主动安全产品可以有效辅助驾驶员驾驶车辆,在提高安全性的同时提高驾驶的舒适性。但是,这些优势可能会因驾驶员对智能化主动安全产品不恰当的响应而减少,甚至消失。如过于频繁的提示可能会导致驾驶员烦躁,过于夸张的提示可能会导致驾驶员注意力分散等。
成功的智能化主动安全产品设计,不仅仅需要正确处理通过雷达或者摄像头获取的交通道路环境信息,还必须通过简洁明了的人机交互界面(HMI)向驾驶员及时传递正确信息,帮助驾驶员识别危险,不可以加重驾驶员的负荷,造成注意力分散。可以说HMI的设计是智能化主动安全技术开发的关键一环,为此展开以下研究。
二、智能化主动安全设计理念研究
汽车安全技术的发展,是从被动安全技术开始的。它的设计理念是降低乘员在碰撞过程中受到的伤害。随着汽车电子技术的不断发展,以ABS和ESC为代表的车辆稳定性控制技术带来了汽车安全技术的变革。汽车安全从单一的被动安全跨越进入了主动安全时代。车辆稳定性控制技术主要关注的是碰撞发生前0.5~2 s内的时间段,通过车辆动力学的控制将驾驶员意图最优地转化为车辆的响应,以调整车辆的运动状态,使车辆保持稳定。车辆稳定性控制技术的设计理念,是控制车辆保持稳定从而避免碰撞的发生。
智能化技术的进步,促进了汽车主动安全技术的进一步发展。以前方碰撞预警系统为例,智能化的主动安全技术帮助驾驶员识别车辆行驶过程中潜在的危险,并提醒他们做出正确的反应,以提高驾驶的安全性。它关注的是碰撞前10 s到碰撞前1~2 s内的时间段。智能化主动安全技术是一个非常复杂的闭环系统,驾驶员是其中最重要的环节。智能化主动安全产品需要在向驾驶员实时提供信息的同时,驾驶员也需要根据这些信息做出相应的反应,系统与驾驶员之间始终存在着信息的交互。因此,智能化主动安全产品的设计必须考虑到驾驶员的主观感受和响应,它的设计理念与被动安全技术和车辆稳定性控制技术等传统的汽车安全技术相比有很大的差别。
对于被动安全技术,它的设计参数都是基于客观的数据,与驾驶员的行为无关。而车辆稳定性控制技术,虽然需要考虑驾驶员的操作意图,但它的介入都是后台进行,与驾驶员之间不存在信息的交互。被动安全技术和车辆稳定性控制技术都可以看作由系统完全取代了驾驶员的操作。但智能化主动安全产品工作时,驾驶员通常有足够的反应时间来进行正确地应对操作,使车辆恢复到安全驾驶状态。
智能化主动安全产品向驾驶员提供信息,目的是辅助驾驶员安全驾驶。因此,提供的信息必须及时、准确、简明,让驾驶员有足够的时间做出相应的反应,而且这些信息不能造成驾驶员的超负荷,干扰驾驶员的正常驾驶。如果驾驶员的注意力被分散,或者信息负荷超过了他们的认知能力,发生碰撞的危险就反而会大大增加。因此,智能化主动安全技术的设计理念就是辅助驾驶员安全驾驶,关键在于辅助,而不是完全代替。
目前,有很多文献对智能化主动安全的设计理念和评价方法进行研究,比如Haberl等人提出了“驾驶辅助系统的10条黄金法则”,从这10条法则可以看出,智能化主动安全产品的设计,除了技术层面外,更重要的是关注驾驶员与系统之间的信息交互。驾驶员与系统之间所有的信息交互都是通过HMI进行的。因此,成功的智能化主动安全产品必须基于合适、易接受的HMI。
综上所述,以驾驶辅助为宗旨的智能化主动安全产品的设计理念与传统的被动安全技术和稳定性控制技术是完全不同的,它不仅仅需要客观数据,而且取决于驾驶员的主观感受和响应。
三、HMI评价方法研究
从前面的分析可以看出,智能化主动安全技术的关键是HMI的设计。目前,已经有很多关于HMI的研究,如欧盟的自适应集成人车界面项目(AIDE),该项目致力于HMI的开发和评价方法的建立。现在各企业和机构提出了很多关于HMI的设计标准和指导方针,但成功的HMI设计不仅仅需要遵循特定的设计标准,而且应该在整个设计过程中切实关注系统的适用性。Gould和Lewis针对HMI的设计提出了关于在设计早期就关注用户和用途、实验验证和循环迭代的理念。
由此可见,只有不断地基于用户进行实践检验才能够对HMI方案进行有效地评价,帮助研究人员发现问题,解决问题,开发更加完善的HMI。
目前,用于HMI评价的实验方法主要有实车实验和采用驾驶模拟器进行实验这两种方式。在真实交通环境下进行实车实验的最大优点,是能够详细记录驾驶员在各种道路情况下的真实反应。但,实车实验的重复性难以控制,危险性也比较大,开发的成本高、时间长。采用驾驶模拟器实验来进行HMI的开发和评价,能够避免上述问题,驾驶模拟器有着效率高、工况重复性好、实验危险性低的优点。因此,整车和零部件厂家目前采用的是实车实验和驾驶模拟器实验相结合的方式,在设计开发的早期阶段和中期阶段采用驾驶模拟器实验和评价HMI方案;在开发的最后阶段,通过实车实验进行最终方案的验收。
驾驶模拟器通常又分为运动式驾驶模拟器和固定式驾驶模拟器两种。运动式驾驶模拟器可以提供实时的车辆运动学状态,如纵向的加速度和侧倾等,更加真实地模拟驾驶员在车辆行驶过程中的感受。但是在驾驶员实际操作车辆的过程中,并不需要感受各方向的加速度,就能够直接对潜在的危险做出正确的反应。由此,固定式驾驶模拟器是能够满足绝大多数的评价需求,且成本比较低。为此,本文将采用固定式驾驶模拟器对智能化主动安全产品的HMI 方案进行评价。
在设计固定式的驾驶模拟器之前,必须明确评价的对象和目的,以便指导模拟器的设置、制定实验计划、数据收集和处理。在实验过程中,输入的信息主要由道路、环境变量和HMI显示组成,输出信息为驾驶员对该HMI界面的主观评分、操作所对应的客观数据。
基于前文描述的设计理念,且参考相关文献,搭建了一个简易的固定式驾驶模拟器(见图2)用于HMI的评价和优化。

图2 固定式驾驶模拟器示意图
该驾驶模拟器采用赛车游戏座椅,置于地面上,支持不同身材的驾驶员调节。在座椅前方的固定装置上安装赛车游戏方向盘套件,包括方向盘、排挡以及加速、制动和离合器踏板。在方向盘前方安装一个大屏幕的显示器,以及音箱,用以将虚拟的交通场景、道路状况、车辆和外界环境的噪音展示给驾驶员。整个系统由一台电脑控制,运行虚拟交通场景并记录驾驶员的操作信息。待评价的智能化主动安全产品的HMI显示屏,可以由单独固定支架放置在驾驶员的视线范围之内,如方向盘左侧。驾驶模拟器的硬件构成如图3所示:

图3 固定式驾驶模拟器硬件构成
虚拟交通场景可采用某系统技术公司的STISIM Drive软件进行编写。这些虚拟的交通场景都来源于真实交通环境下的视频采集。实验进行过程中,通过显示器将虚拟的交通场景展示给驾驶员,如图4所示。
待评价的智能化主动安全产品输入信息也是直接来源于电脑中STISIM Drive软件,而并非采用雷达或者摄像头,捕捉虚拟交通场景中的信息。智能化主动安全产品将虚拟交通场景中包含的车辆周围,包括其他车辆、行人和交通标志等数据信息处理之后,显示在其HMI屏幕上。

图4 虚拟交通场景
对于HMI评价实验而言,需要同时获取客观和主观的数据。客观数据用来评价智能化主动安全产品对于驾驶员驾驶状态的改变,比如潜在碰撞(距离发生碰撞的时间小于0.5 s)次数,由STISIM Drive软件自动记录并计算输出。主观数据用来评价驾驶员对智能化主动安全产品的主观感受和体验。本实验中通过调查问卷来获得驾驶员的主观感受,该问卷由一个10分制的打分项目组成,主要用于评价系统的有用性和驾驶员对系统的满意度(见表1)。

表1 主观评分考量标准
对于一般的HMI实验,根据Nielsen的结论,采用20个样本就能获得置信度较高的结果。
在对某智能化主动安全产品的HMI设计优化过程中,针对两个版本的HMI界面进行了驾驶模拟器的评价实验,并对20个有效参试者的主客观数据进行分析,评价对比结果见图5、表2。
从参试者的主观评分可以看出,2.0版本的驾驶员的主观评分比1.0版本有所提高,说明大部分参试者对2.0版本的接受程度更高,更加满意。从客观实验数据也可以看出,潜在碰撞次数随着版本提升而减小,说明驾驶员在经历2.0版本产品的若干次提醒之后采取了更为保守的驾驶操作,与其他车辆的安全距离保持得更大。因此,可以获得更高的安全性。

图5 HMI实验界面版本图

表2 HMI两版本的评价对比结果
四、结 论
汽车主动安全技术有巨大的潜力来提高道路交通安全性和驾驶的舒适性。随着汽车安全技术的不断发展,主动安全技术的研究得到了越来越多的重视。智能化主动安全技术与传统的汽车安全技术相比有很大的不同。被动安全技术和稳定性控制技术的设计理念都是基于客观的数据,设计标准相对容易确定。智能化主动安全技术需要不断地与驾驶员进行信息交互,故它的设计理念则不再仅仅是确定数据,而且还包括了驾驶员的主观感受和响应,驾驶员的接受程度决定了智能化主动安全设计的成败。由于所有的信息交互都是通过HMI来实现的,故智能化主动安全设计的关键是通过对驾驶员行为研究设计适合的HMI。
在对HMI进行设计优化时,固定驾驶模拟器由于效率高、重复性好等优点,因而得到了广泛的运用。本文设计了一个简易的固定式驾驶模拟器用以HMI的评价和优化。使用该模拟器进行的驾驶员主观和客观实验表明,该方法能够有效地指导智能化主动安全产品HMI的设计和优化。
This paper compares the difference between the active safety technology of intelligent automotive and the safety technology of traditional automotive, and describes the design concept of the intelligent active safety technology. A simple fixed driving simulator, which can be used to guide the evaluation and optimization of intelligence active safety product HMI, was designed and verifed.
Intelligent Active Safety; HMI; Design Concept Research; Driving Simulator
(作者单位:1上海汽车集团股份有限公司商用车技术中心2国家机动车产品质量监督检验中心(上海))
