高动态环境载波跟踪环路的设计
2016-04-12吴毅杰李帆
吴毅杰 李帆
【摘要】 为了满足高动态环境下对测轨定位的需求,对数字中频接收机载波同步跟踪关键技术进行了研究。针对高动态环境下载波同步需要解决的捕获带宽、捕获速度与跟踪精度的矛盾,综合利用了传统数字锁频环路和数字锁相环路 的优点,设计了一种适合高动态环境下数字中频接收机的锁频联合锁相环工作的环路方案。仿真和测试结果表明:改进算法解决了环路跟踪精度和动态性能不能兼顾的矛盾,信号跟踪环路能在高动态环境中实现对信号的稳定跟踪。
【关键词】 高动态 中频接收机 载波跟踪环 锁频环 锁相环
一、引言
本文对高动态环境下中频接收机的载波跟踪算法进行研究,通过对载波跟踪环路的设计、仿真与测试,充分利用二阶数字锁频环路和三阶数字锁相环路的优点,形成一种锁频锁相环联合工作的方法[1],解决较大的载波捕获带宽、捕获速度和较高的跟踪精度之间的矛盾,建立了适合在高动态环境下进行载波跟踪算法模型。
二、三阶锁相跟踪环路设计
2.1模拟三阶锁相环环路结构
模拟锁相环结构[2]原理框图如图1:
2.2数字三阶锁相环环路结构
三阶锁相环环路滤波器离散表达形式[3]: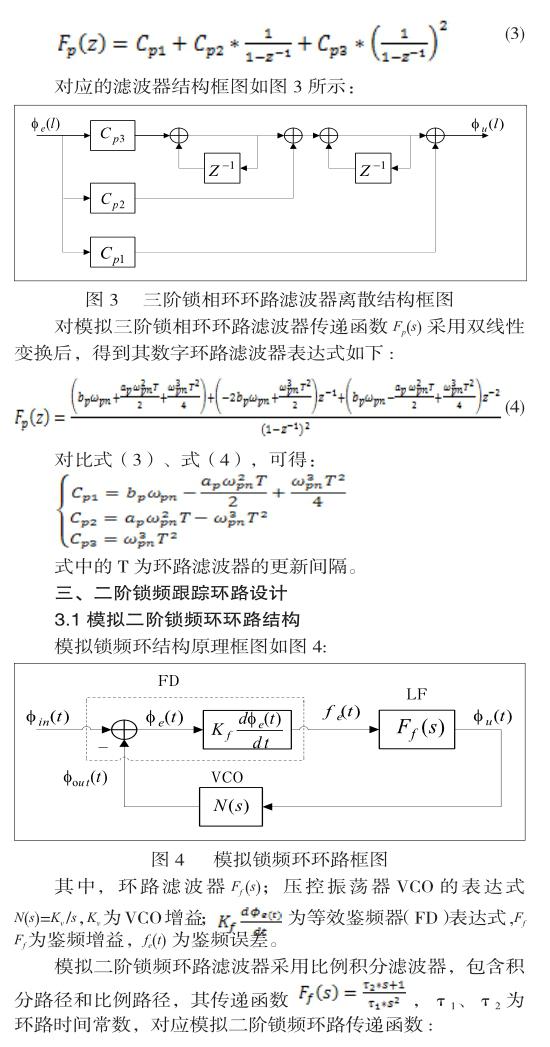
式中的T为环路滤波器的更新间隔。
四、高动态环境下二阶FLL辅助三阶PLL载波跟踪环路设计
高动态环境下,锁频环辅助锁相环[4][5]是一种较为合理的载波环设计方案,将锁频环和锁相环结合使用可以充分发挥各自的优势;当数字中频接收机刚开始工作时,载波频偏有可能处于一个较大的偏差之上,此时采用FLL 实现频率跟踪,PLL 贡献比较少,当频率被牵引到一定范围内时,此时PLL 开始工作,实现相位的精细同步。当动态增强时,由FLL 实现频率跟踪牵引,实现动态性的变化,环路自动实现PLL 和FLL 跟踪方式的配合跟踪。
4.1 载波跟踪环切换策略
在载波环工作过程中,依据频差和相差的大小可以区分出以下三种情况:频差较大;频差较小且相差较大;频差较小且相差较小。因此,锁频环与锁相环之间的切换策略以频率和相位的判决量作为依据[6]。
设置频率判决表达式为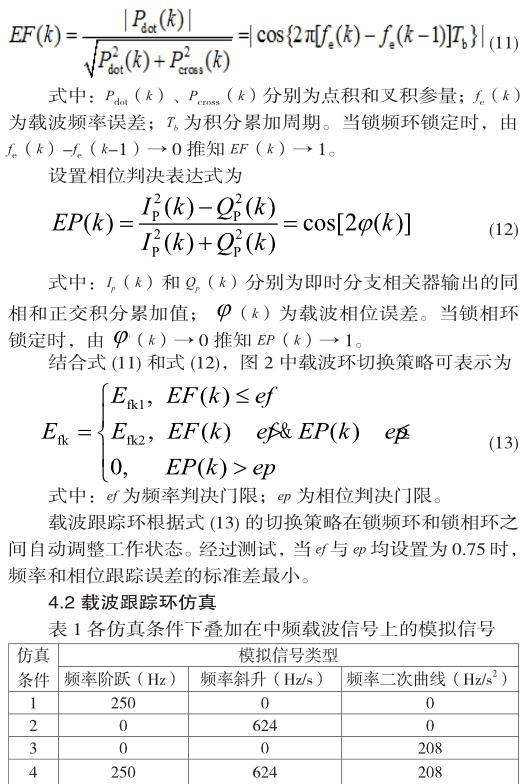
为了模拟多普勒效应对载波跟踪环的影响,仿真中设定环路的输入载噪比为40(dB·Hz),在输入载波环的中频信号上分别叠加模拟的频率阶跃信号、频率斜升信号和频率二次曲线信号;各仿真条件下叠加在中频信号上的模拟信号如表1所示。以动态最高的仿真条件4为例,在300ms处输入信号和本地复现载波之间开始叠加模拟信号,该条件对应的载波环跟踪结果如图8所示。
由图8(a)可知,环路开始工作时频率判决量低于门限,载波环以纯锁频环形式工作;在大约380ms处,频率判决量高于门限且相位判决量低于门限,载波环开始以锁频环辅助锁相环形式工作;650ms后,频率判决量和相位判决量均高于其门限,载波环开始以纯锁相环形式工作。由图8(b)可知,载波环能稳定跟踪第4组仿真条件下的高动态信号,经数据分析得到稳定跟踪后载波相位的均方误差为2.97°。
五、结束语
载波跟踪环路的设计与实现是高动态环境下中频接收机能否成功研制的关键因素之一。本文对高动态环境下中频接收机的载波跟踪算法进行了研究,最终形成了跟踪算法模型并对载波跟踪环路的性能进行了仿真测试。结果表明:载波跟踪环的设计能够在高动态环境下实现对信号的稳定跟踪。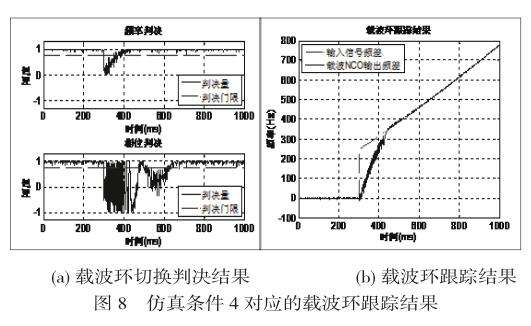
参 考 文 献
[1]王兰芳,吴长奇,高秀英.基于 FLL 与 PLL 级联的高动态载波跟踪技术[J].电子测量技术.2009,35(4):61-64
[2]张厥盛,郑继禹,万心平.锁相技术[M].西安:西安电子科技大学出版社,1994.
[3]王光鼎,游福初,房建成.基于 FLL 与 PLL 级联的高动态载波跟踪技术[J].战术导弹技术.2012,3(5):01-07.
[4]鲁郁. GPS全球定位接收机——原理与软件实现[M]. 北京: 电子工业出版社, 2009.
[5]P. W. Ward. Performance Comparisons Between FLL, PLL and a Novel FLL-Assisted-PLL Carrier Tracking Loop Under RF Interference Conditions[J]. Proceedings of the 11th International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, 1998: 783-795.
[6]冯晓明, 廉保旺, 何伟. 一种改进的高动态GPS载波组合跟踪环路算法[J]. 现代电子技术, 2012, 35(5): 39-42..
