CNP650压水堆不调硼负荷跟踪可行性研究
2016-04-11刘同先
刘同先,吴 磊,陈 长,李 庆
(中国核动力研究设计院核反应堆系统设计技术重点实验室,四川成都610041)
CNP650压水堆不调硼负荷跟踪可行性研究
刘同先,吴 磊,陈 长,李 庆
(中国核动力研究设计院核反应堆系统设计技术重点实验室,四川成都610041)
海南昌江核电厂等CNP650压水堆采用Mode-A控制模式,该模式采用黑体控制棒,有很好的基负荷运行能力,但负荷跟踪能力相对较差。而对一些具有小电网的国家或地区,负荷跟踪运行能力具有一定的市场需求。不调硼负荷跟踪通过棒控系统自动完成,大大减轻了操纵员负担;负荷跟踪过程基本不需要频繁地调硼操作,允许简化化学和容积控制系统设计,减少了废液处理成本。为此,在CNP650压水堆上进行了不调硼负荷跟踪研究。负荷跟踪过程主要有两个控制任务:一是反应性补偿;二是功率分布控制。根据不调硼负荷跟踪的控制任务,重新进行了控制棒的设计、分组和布置,设置两套独立控制的控制棒组(功率补偿棒组和轴向偏移控制棒组),分别用于堆芯反应性控制和轴向功率分布控制,以实现不调硼负荷跟踪。使用SCIENCE程序包进行典型的12h~3h~6h~3h、100%—50%—100%功率水平的日负荷循环计算来进行不调硼负荷跟踪分析。计算步骤为:进行三维堆芯模型计算;根据三维堆芯模型建立一维堆芯模型;在一维模型基础上,进行模拟计算。完成了海南昌江核电厂平衡循环寿期末典型的日负荷循环不调硼运行分析,模拟计算结果表明在CNP650压水堆上不调硼负荷跟踪运行模式是可行的。
CNP650;负荷跟踪;不调硼;轴向偏移
核电站的运行模式是由核电站与电网之间的联系方式决定的。如果核电机组的总容量占电网总容量的比例较高,核电机组不跟随电网的需求来调节发电功率,会给电网运行带来较大的困难。适当考虑电网对电能总需求的变化,要求核电机组在一定范围内调节它的发电功率[1],这种运行模式一般称为负荷跟踪运行模式。在负荷跟踪时,反应堆功率随负荷变化,需要一种合适的堆芯控制模式进行反应堆堆芯控制。
海南昌江核电厂等CNP650压水堆采用Mode-A控制模式,该模式中控制棒均为黑体控制棒,其吸收中子能力较强。控制棒主要用于堆芯轴向偏移(AO)控制,同时补偿功率变化引起的反应性变化;当两者矛盾时,反应性变化差额由调硼系统承担。Mode-A控制模式下,有很好的基负荷运行能力,但负荷跟踪运行能力相对较差。该模式进行负荷跟踪运行时,无法快速调节反应堆功率,且需要调硼系统参与反应性调节,对一次冷却剂进行频繁的稀释和硼化,调硼带来下述不足之处:产生大量放射性废液,增加了运行成本;寿期末利用调硼来补偿负荷跟踪过程中的反应性变化,会产生比寿期初多数倍的废液,使得核电厂的废液处理系统无法承担而丧失负荷跟踪能力;调硼操作相对频繁而且是手动实施的,增加了操纵员负担。
不调硼负荷跟踪运行通过棒控系统自动完成,大大减轻了操纵员负担;负荷跟踪过程基本不需要频繁地调硼操作,允许简化化容系统设计,减少了废液处理成本。美国用户要求文件URD[2]和欧洲用户要求文件EUR[3]都要求新一代核电站具有不调硼负荷跟踪能力。西屋公司在90年代初开发出了具有不调硼负荷跟踪能力的机械补偿控制模式(MSHIM)[4],国内研究人员对采用Mode-G控制模式的M310压水堆也开展了不调硼负荷跟踪研究[5],但尚未在CNP650压水堆上开展不调硼负荷跟踪研究。
基于负荷跟踪的控制任务分析,重新进行控制模式设计,以使CNP650压水堆上具有不调硼负荷跟踪运行能力,这不仅对海南昌江核电厂的运行模式带来重大改进,而且对在一些具有小电网的国家或地区,仍有一定的市场需求。
1 控制任务分析
不调硼负荷跟踪通过使用控制棒代替调节可溶硼进行堆芯反应性控制。负荷跟踪过程中的反应性和功率分布通过棒控系统自动完成,大大减轻了操纵员负担;负荷跟踪过程基本不需要频繁地调硼操作,允许简化化容系统设计,减少了废液处理成本,并有利于环境保护。负荷跟踪过程主要有两个控制任务:一是反应性补偿;二是功率分布控制。
在模拟计算中选用标准的日负荷循环来验证控制系统的不调硼负荷跟踪能力。即要求核反应堆在12h满功率运行后在3h内功率线性变化到50%(70%)满功率,在50%(70%)满功率下运行6h后又在3h内将功率线性增长到满功率水平,以适应电网负荷变化的要求。如图1所示。

图1 典型的日负荷跟踪Fig.1 Typical load follow transient
选用中国核动力研究设计院完成的长循环堆芯燃料管理方案进行负荷跟踪的控制任务分析。完成了平衡循环的接近寿期末、100%—50%—100%形式负荷跟踪的反应性变化计算。使用了SCIENCE程序包进行计算,计算步骤为:用SMART程序进行三维堆芯模型计算;根据三维堆芯模型建立一维堆芯模型;在一维模型基础上,采用ESPADON程序进行模拟计算。假定负荷跟踪过程中控制棒位置和硼浓度都保持不变时,图2给出48h的反应性变化,图3给出了48h堆芯AO的变化。

图2 负荷跟踪中的反应性变化Fig.2 Various reactivity during load follow

图3 控制棒组固定时负荷跟踪中的AO变化Fig.3 Axial offset during load follow with fixed control banks
由图2可以看到,功率亏损对应的反应性约为1200pcm,而上述条件下的负荷跟踪,功率变化引入的反应性亏损与瞬态氙变化引入的反应性大部分时间是互相抵消的,这在一定程度上减轻了反应性控制负担。由图3可以看到,如果不加任何调控措施,负荷跟踪过程中,堆芯AO的变化范围非常大(-35%~70%),这在核电厂的实际运行中是绝对不允许的。不调硼负荷跟踪设计的目的正是通过控制棒对上述两个参数进行合理的控制。
2 控制模式设计
2.1 控制棒分组
负荷跟踪开始时,汽轮机负荷降低,反应堆冷却剂平均温度升高;控制棒组插入堆芯、降低反应堆功率,以维持冷却剂平均温度在设定的运行带内;功率降低将触发氙瞬态,当达到低功率运行平台后,氙的累积引入负反应性,导致控制棒组缓慢提出;经过氙峰后,控制棒组将再次缓慢插入。反之,当汽轮机负荷升高时,反应堆冷却剂平均温度降低;控制棒组提出、提高反应堆功率,以维持冷却剂平均温度在设定的运行带内;当达到高功率运行平台后,氙的消耗引入正反应性,导致控制棒组缓慢插入堆芯。一个控制棒组无法同时承担两项控制任务,整个瞬态过程中,还需要一个额外的控制棒组将堆芯AO维持在设定的运行带内。通过阶段性调节可溶性硼,将控制棒组恢复到运行范围内。
从上述分析过程可以看出,要实现不调硼负荷跟踪,需要设置两套独立控制的控制棒组:功率补偿棒组(T棒组)和轴向偏移控制棒组(AO棒组)。T棒组用于堆芯反应性控制,为减小对堆芯功率分布的扰动,T棒组采用部分灰体控制棒,移动时满足规定的重叠步数以及顺序。进行负荷跟踪时,T棒组插入堆芯的深度由堆芯各种反应性总量决定,用于维持堆芯反应性平衡或按一定规律维持反应堆的平均温度与功率的关系。AO棒组主要用于轴向功率分布控制,控制堆芯AO值在目标值范围内。AO棒组为黑体控制棒,一般插入堆芯较少,只在堆芯上部的一个运行带内运行。
2.2 控制棒布置
根据第2节的控制任务分析,完成了功率补偿棒组(包括T1~T4四组控制棒)的结构和分组设计。灰棒在提供反应性的同时对轴向功率分布的影响应当较小,同时还要顾及总停堆裕量的要求。控制棒分组及布置见图4。功率控制棒组包括T棒组和AO棒组,停堆棒组为S棒组,用于确保反应堆在任何功率水平下都有足够的停堆裕量。
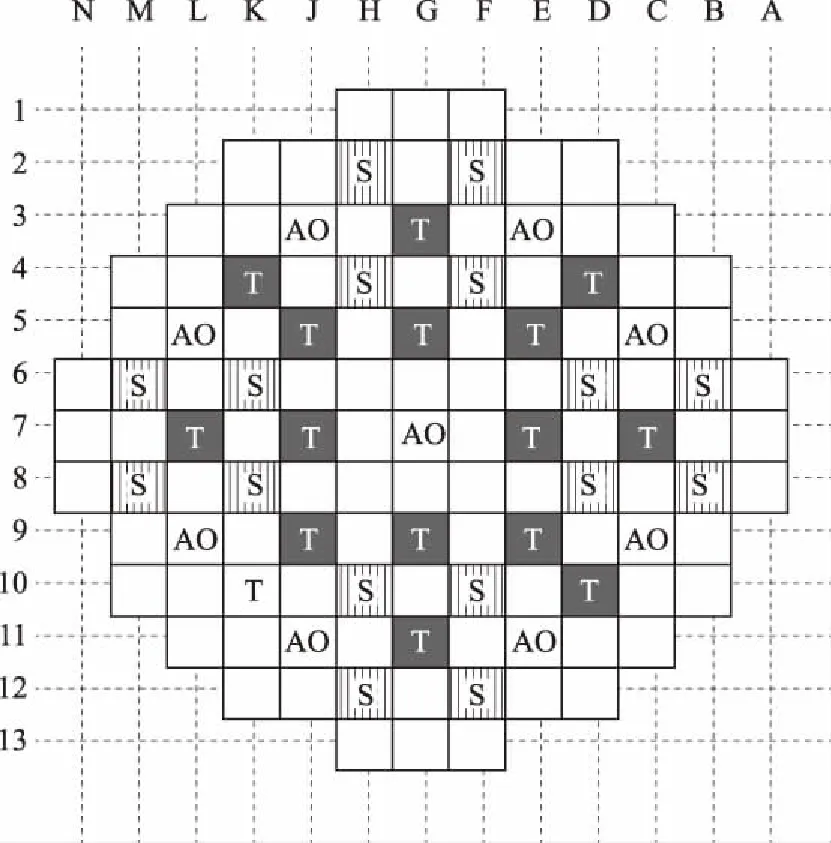
图4 控制棒布置图Fig.4 Control rods layout
海南昌江核电厂等CNP650压水堆堆芯共布置33束黑体控制棒,参考秦山第二核电厂长循环燃料管理论证的计算结果,停堆裕量虽然满足事故分析要求,但相应的安全裕量较小;又鉴于T棒组需要使用部分灰体控制棒,因此必须增加堆芯的控制棒束数量。值得说明的是,上述控制棒布置共使用了41束控制棒,其中33束为黑体控制棒,8束为灰体控制棒,预计停堆裕量满足要求。
基于功率水平和瞬态氙引入的反应性随时间的变化规律,为了实现不调硼负荷跟踪,控制棒必须在需要的时候能够提供足够大的正/负反应性以维持反应堆处在临界状态。表1给出了上述控制棒布置下、平衡循环的控制棒组的积分价值。从表中数据可以看出:对于低功率平台为50%Pn的负荷跟踪运行,T棒组足以补偿负荷跟踪过程中的反应性变化;AO棒组价值足够大,稍微移动就能实质上影响轴向功率分布。
2.3 棒控系统设计
在自动控制方式运行时,控制棒的速度和方向信号是由三个参数决定的。根据反应堆冷却剂平均温度与参考温度的偏差,以及中子注量率与汽轮机功率的失配信号的组合,组成一个温度误差信号。由此温度误差信号产生一个模拟信号和两个逻辑信号,它们分别是:控制棒运动速度信号和它的提升或插入的方向信号,用于驱动T棒组。根据反应堆AO与参考AO的偏差,确定一个堆芯轴向偏移误差信号。由此误差信号产生一个模拟信号和两个逻辑信号,它们分别是:控制棒运动速度信号和它的提升或插入的方向信号,用于驱动AO棒组。实现了负荷过程中控制棒组自动动作,大大减轻了人员操作负担。

表1 平衡循环控制棒积分价值计算结果Table 1 Integral worth of control banks
3 计算实例
为降低T棒组在移动过程中对堆芯AO的影响,并减轻AO棒组的负担,需要考虑T棒组的重叠步数。堆芯出口慢化剂温度随着功率降低而降低,堆芯AO变正;而降低反应堆功率,需要控制棒组插入堆芯以补偿相应的功率亏损,控制棒初期插入导致堆芯AO变负;设置合理的重叠步,在堆芯功率变化过程中,T棒组就能够把堆芯AO维持一个较小的范围内,减少AO棒组移动。
采用第2节描述的一维计算模型,图5给出了一个优化重叠步下、T棒组补偿功率亏损时的堆芯AO随时间的变化,变化范围和图3相比大大减小(-1%~13%);图5还给出负荷跟踪过程中的氙反应性变化(-400~400pcm),和图2相比更接近现实情况。比如负荷跟踪的第27~30h,反应堆降到低功率平台运行,氙毒累积引入负反应性;而图2中该时间段的反应性变化趋势“异常”,正是因为控制棒组固定不动时,AO表征的堆芯轴向功率分布波动过大,导致氙反应性的轴向积分值偏离现实工况较远。

图5 T棒组补偿功率亏损时堆芯AO变化Fig.5 Axial offset during load follow when using T banks to control power defect
采用优化的T棒组重叠步数和第2节中描述的一维堆芯模型,进行不调硼负荷跟踪模拟计算。模拟计算仍采用一维ESPADON程序,程序中内置的“Mode A”和“Mode G”计算模式,对于采用Mode-A和Mode-G控制模式的反应堆,可以方便地进行负荷跟踪模拟计算,但无法直接应用于不调硼负荷跟踪运行。本文采用ESPADON程序中的“Mode U”计算模式,通过自行定义负荷过程中搜索策略,实现了不调硼负荷跟踪模拟计算。计算结果详见图6,从图上数据可以看出,对于平衡循环接近寿期末的燃耗步,负荷跟踪过程中,仅通过T棒组的前三个棒组(T1-T3)就能完成反应性控制任务,实现硼浓度保持不变;AO棒组插入堆芯的深度小于40步,将堆芯轴向功率偏差(ΔI=AO×P)维持在目标值±5%的运行带内;轴向功率分布得到了良好的控制,相应的轴向功率峰因子Fz的计算值均小于1.30。
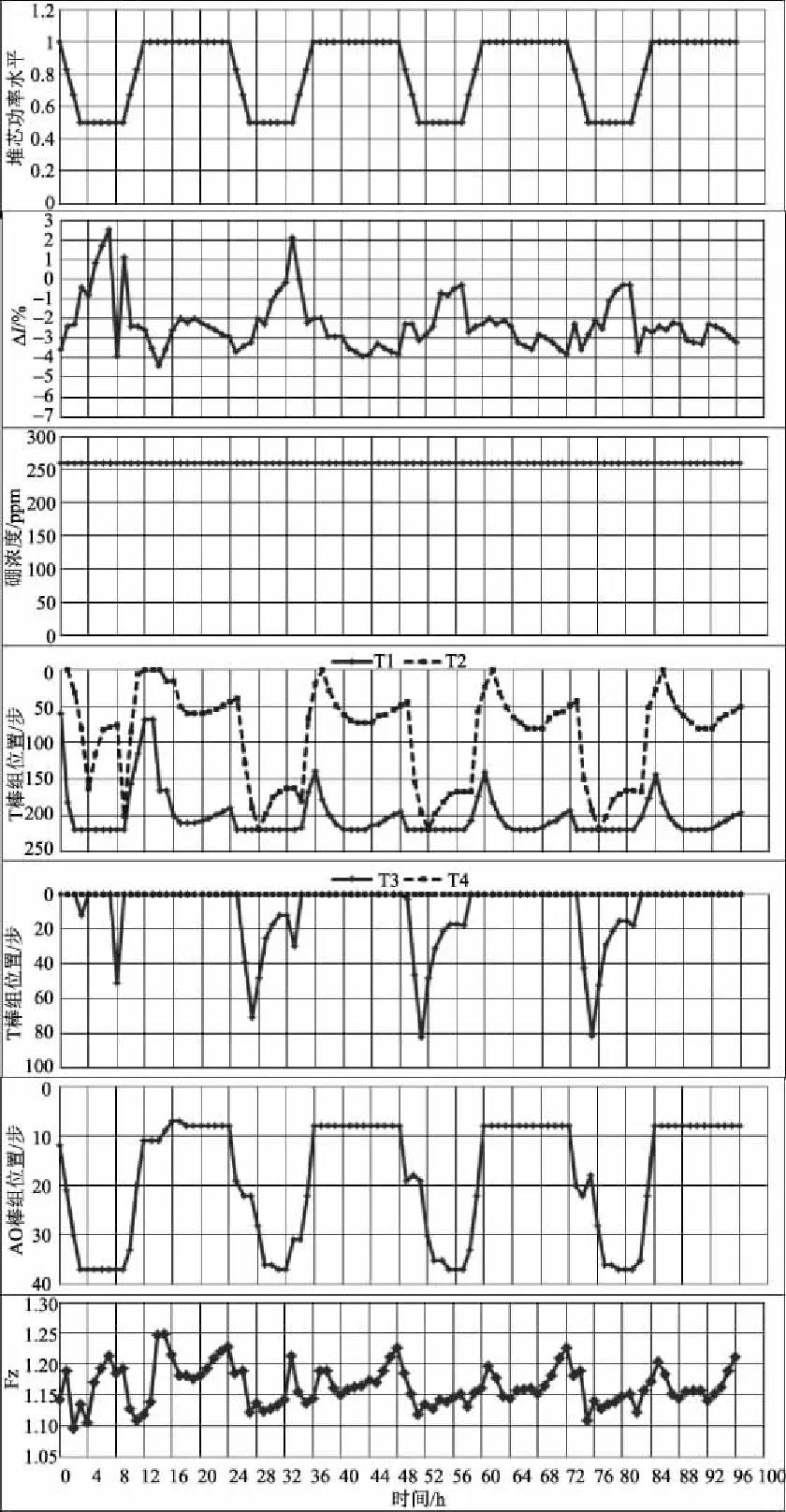
图6 不调硼负荷跟踪的计算结果Fig.6 Calculation results of load follow with fixed boron
4 小结
综上,可以得到如下结论:
(1) 海南昌江核电厂等CNP650压水堆采用Mode-A控制模式,该模式采用黑体控制棒,控制棒组没有分组,负荷跟踪能力相对较差。
(2) 根据不调硼负荷跟踪的控制任务,重新进行了控制棒的设计、分组和布置;为了满足停堆裕量的要求,需要增加堆芯的控制棒束数量。新的控制模式使CNP650压水堆实现了控制棒进行反应性补偿和功率分布控制的目的;负荷过程中控制棒组自动动作,减轻了人员操作负担。
(3) 完成了新的控制模式下特定燃耗步、12 h~3 h~6 h~3 h、100%—50%—100%功率水平的日负荷循环负荷跟踪计算,模拟计算结果表明负荷跟踪过程中堆芯硼浓度可以保持不变,证明CNP650压水堆上不调硼负荷跟踪运行模式是可行的。
(4) 不调硼负荷跟踪中轴向功率分布能够得到良好的控制,但灰体控制棒设计、现场软硬件修改、反应堆的操作运行方式还需要进一步开展工作、反应堆堆芯的安全性还需要详细的安全分析进一步论证。
[1] 陈济东.大亚湾核电站系统及运行[M].北京:原子能出版社, 1994.
[2] ADVANCED LIGHT WATER REACTOR UTILITY REQUIEMENTS DOCUMENT, Prepared For Electric Power Research Institute, Palo Alto, California, Revision 6, Issued 12/93.
[3] EUROPEAN UTILITY REQUIREMENTS FOR LWR NUCLEAR POWER PLANTS, Revision B, Nov. 1995.[4] T. Morita, B. W. Carlsen, J. P. Kutz, “Load Follow Operation with the MSHIM Control System”, ANS Topical Meeting Transaction, No.2, Vol.56, P.73, April, 1988.
[5] 马兹容, 姚增华. M310压水堆的改进——不调硼负荷跟随研究[J].核科学与工程, 2004, 4:294-300.
Investigations in Feasibility of load Follow withConstant Boron in CNP650 PWR
LIU Tong-xian,WU Lei, CHEN Zhang, LI Qing
(Science and Technology on Reactor Design Technology Laboratory,Nuclear Power Institute of China,Chengdu, 610041,China)
The CNP650 PWR such as HNCJ NPP implements Mode-A strategy, which uses black control rods. The Mode-A strategy has fine capability of base load operation and bad capability of load follow operation. The capability of load follow operation is needed in some countries or regions with small grid. The automation of control is accomplished through manipulating control rod bank positions as opposed to frequently changing the core boron concentration of load follow in Mode-A, which eases operator burden. An additional purpose is to minimize and in many cases completely eliminate the need for soluble boron changes during load change transients, thus allowing a simplified Chemical and Volume Control System and minimizing waste water processing. A study of the load follow without boron adjustment was performed for CNP650 PWR. Two unique reactor control requirements that are reactivity control and power distribution control are needed to settle during load follow. On the base of control requirements, the control rods worth, sets and layout were redesigned. Two separate sets of control rods which are power compensation banks and axial offset control bank are dedicated to coolant temperature (reactivity) control and to control of axial offset to target value respectively in order to perform load follow with constant boron. The SCIENCE package is used to perform the analysis of load follow with constant boron referred to as 12h~3h~6h~3h (100%—50%—100%) load cycle. Three calculation steps which are setting the three-dimension core model, collapsing three-dimension core model into one-dimension core model, performing simulation on the base of one-dimension core model are carried out in sequence. At the burnup near the end of the 18-month refueling equilibrium cycle, the analysis of load follow with constant boron referred to typical daily load cycle are performed successfully. The calculation results confirm that load follow with constant boron in CNP650 PWR is feasible.
CNP650; Load follow; Constant boron; Axial offset
2016-05-29
刘同先(1982—),男,高级工程师。2007年毕业于哈尔滨工程大学核能科学与工程专业,获硕士学位。现从事反应堆物理方向的工作
TL329+.2
A
0258-0918(2016)05-0595-06