基于改进灰色预测GM( 1,1)模型的大跨度桥梁施工控制
2016-04-11包仪军王常峰赵继康
包仪军,王常峰,赵继康
( 1.兰州交通大学土木工程学院,甘肃兰州 730070; 2.烟台大学土木工程学院,山东烟台 264005)
基于改进灰色预测GM( 1,1)模型的大跨度桥梁施工控制
包仪军1,王常峰2,赵继康1
( 1.兰州交通大学土木工程学院,甘肃兰州730070; 2.烟台大学土木工程学院,山东烟台264005)
摘要:通过最小二乘法和最优寻求定权对灰色GM( 1,1)预测模型的背景值及初始值进行了修正,采用多点滑动平均的方法对原始序列进行了优化,提出了改进的桥梁施工灰色控制系统。在大跨度桥梁悬臂施工控制中,采用全数据模型作为原始序列,对改进的灰色控制系统进行验证。结果表明,浇筑混凝土时的预测位移与实测位移最大差值为5. 1 mm;合龙前梁体理论线形与实测线形吻合度高,成桥后梁体完全符合平顺性要求。该模型具有较强的可操作性,预测精度高,对复杂的大跨度桥梁施工控制有很好的参考价值。
关键词:大跨度桥梁悬臂施工施工控制灰色理论改进的GM( 1,1)模型
大跨度连续梁的成桥要经历复杂的体系转换,在施工过程中梁体的竖向位移及内力均在不断变化。为了确保梁体顺利合龙并满足设计线形,必须进行施工控制[1]。施工控制的核心任务是通过模拟施工过程并计算梁体预拱度,结合施工控制预测理论对梁体立模标高进行预测[2]。目前广泛使用的施工控制理论有自适应控制理论、灰色控制理论、卡尔曼滤波法、BP神经网络等[3]。其中,灰色控制理论[4]自邓聚龙教授于1982年提出后便应用到各行各业。在20世纪90年代初期,灰色控制理论开始应用于大跨度连续梁桥施工控制中,成为一种广泛认可的桥梁控制理论。
灰色控制理论,即通过理论计算值与实测值之比(或差值)作为原始序列建立GM( 1,1)模型灰微分方程,对方程求解并累减还原,从而预测下一施工节段的立模标高。目前,灰色控制理论在桥梁施工控制中多采用GM( 1,1)预测模型或多种理论结合,而没有从模型本身的精度入手进行研究。张永水等[5]建立的灰色系统施工控制程序,在重庆黄花园嘉陵江大桥的施工控制中取得较好的效果;包龙生等[6]应用灰色GM( 1,1)模型对连续梁桥预拱度进行预测,在最大悬臂端浇筑完成后,合龙段两端的高差为15 mm,保证全桥顺利合龙;王常峰等[7]将灰色控制系统理论和自适应控制理论同时应用到无砟轨道高速铁路特大桥中,发现两种控制理论都能合理预测梁体挠度;张熙胤等[8]在单变量GM( 1,1)模型的基础上提出了多变量GM( 1,n)模型,对灰色控制理论在桥梁控制中的应用作了创新与发展。
本文对GM( 1,1)预测模型存在的缺陷进行修正,对原始序列进行平滑处理,建立改进的灰色控制系统。
1灰色GM( 1,1)预测模型
假设原始序列X( 0)

进行累加生成X( 1)

其影子方程为

式中: a为发展灰数,b为灰色作用量。将式( 1)进行离散化得到

其中,Z( 1)( k + 1) = 0. 5[X( 1)( k + 1) + X( 1)( k)],称为式( 1)的背景值,根据最小二乘法求解式( 2)得到

求解出系数a,b后代入式( 1)得到该微分方程的解

为了计算出系数c,必须要确定一个边界条件(初始值)。假定,代入式( 4)得到c = X( 0)( 1)-,则预测公式为式( 5),进而通过累减还原得到原始序列的预测模型。
在整个求解过程中进行了两次假设:①假设背景值由累加生成数列的邻值等权生成,而该假设无法从理论上说明其预测精度最高;②确定初始值的过程中,假定,而该假定亦没有理论依据。
诸多学者对以上问题进行了研究。对于背景值的确定,樊新海等[9]、杨华龙等[10]采用自动寻优定权的方法选择背景值的最优权值,并且都通过实例证明了该方法的有效性;对于初值的确定,张大海等[11]指出将原始序列的n个数据分别作为初值计算模型的精度,选择精度最高的进行预测,杨华龙等[10]认为拟合
2 改进的灰色控制系统
2. 1原始序列的改进
施工控制过程中需要对立模标高的数据进行预测,通常采用实际测量值和理论计算值的比值或差值作为GM( 1,1)模型的原始序列。原始序列的随机性及波动变化会导致预期效果不理想,对原始数据的预处理有多种方式[12]:①采用序列运算对原始序列进行权值的强弱分配;②采用多点滑动平均对原始序列进行光滑处理,减小其波动性;③由于GM( 1,1)模型影子方程的解为指数形式,故可以对原始序列进行指数或对数变换处理。
本文采用实际值与理论值的差值作为原始序列,序列值上下波动且具有随机性,故采用多点滑动平均的方法对原始序列进行处理。
设原始序列X( 0)( k)有n个数据: X( 0)= { X( 0)( 1),X( 0)( 2),…,X( 0)( n) },对其采用多点滑动平均得到下式

当k = 1时,X( 0)( 1) =[3X( 0)( 1) + X( 0)( 2)]/4 ; 当k = n时,X( 0)( n) =[X( 0)( n-1) + 3X( 0)( n)]/4。
2. 2背景值及初始值的改进
假设背景值Z( 1)( k + 1)的权重系数为μ(μ∈[0,1])。首先令μ= 0,然后给μ增大一个微小量Δμ(本文取Δμ= 0. 001),即μ=μ+Δμ,直到μ= 1为止。将μ代入背景值表达式有

进而可由最小二乘法求得式( 3)中的Y,B矩阵





计算出每个权重系数μ所对应的残差平方和,最小残差平方和所对应的权重值为背景值的最佳权重系数。
2. 3灰色控制系统预测流程
传统的灰色模型GM( 1,1),通常选择最新的4个数据为原始序列。这是由于较远的数据对新数据的影响较小,故权重系数均按0. 5考虑。本文对权重系数采用自动寻优的方法确定最佳权重,即采用全数据模型。建立的灰色控制系统预测流程如图1所示,并根据改进的灰色控制系统编写了MATLAB程序。
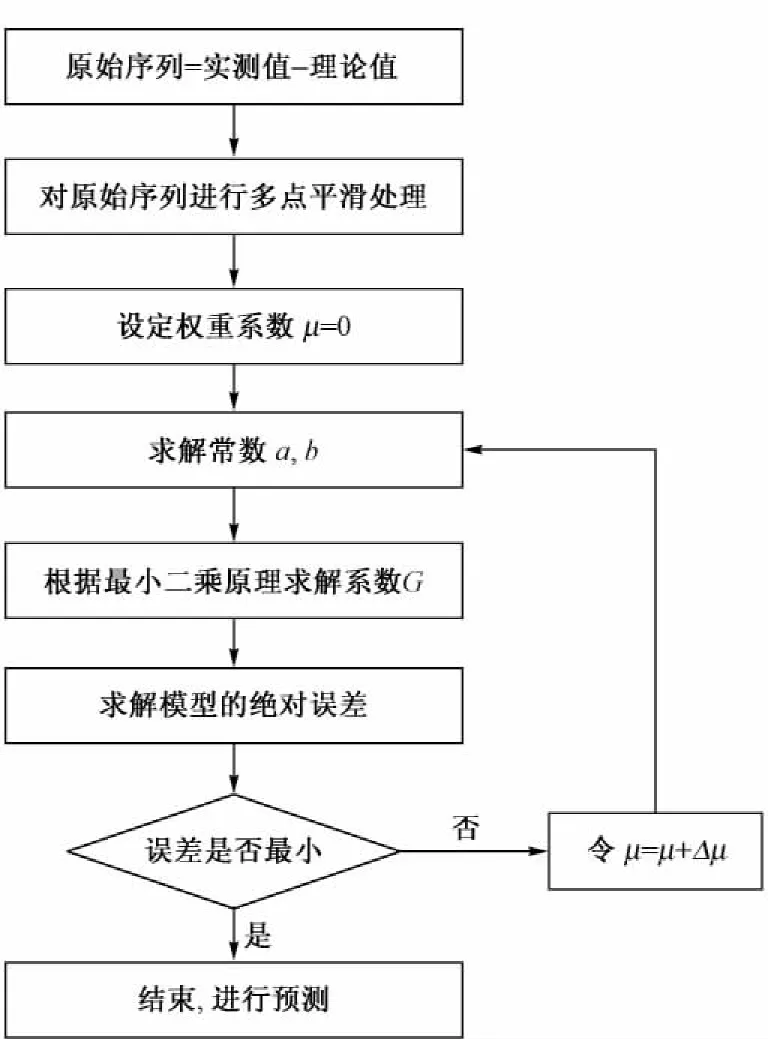
图1灰色控制系统预测流程
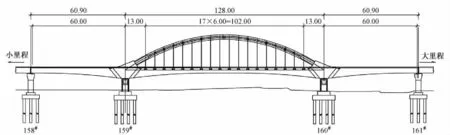
图2桥型布置(单位: m)
3 工程应用
3. 1工程概况
一( 60 + 128 + 60) m桥为预应力混凝土连续梁与中孔钢管混凝土加劲拱组合结构体系,桥型布置如图2所示。梁体为单箱双室箱梁,箱梁顶板宽18. 0 m,底板宽12. 2 m,中支点梁高7. 0 m,跨中合龙段及边跨现浇段梁高3. 5 m。由于本桥为梁拱组合体系,梁体的刚度较普通的连续梁小,且连续梁部分采用悬臂施工方法,共有16个施工块,在施工过程中梁体挠度变化幅度大且复杂,必须采取有效的施工监控措施。本桥主梁施工控制中1#~8#,1'#~8'#块采用自适应控制系统进行预测与控制,9#~15#,9'#~16'#块采用改进的GM( 1,1)模型预测。图3为160#墩施工节段示意。
3. 2建立改进的GM( 1,1)模型
以160#墩小里程侧12'#施工块为例,说明改进后GM( 1,1)模型的预测过程。由于1'#~4'#块在浇筑混凝土时的变形量不大,且测量本身带有误差,故不作为原始数据进行预测。浇筑5'#~11'#块时的理论变形值依次为-1. 2,-1. 3,-2. 2,-2. 5,-3. 8,-5. 8和-9. 3 mm;实际变形值依次为-1. 5,-1. 7,-4. 0,-4. 0,-5. 5,-8. 0和-13. 0 mm。将理论值与实际值的差值作为原始序列: X( 0)= ( 0. 3,0. 4,1. 8,1. 5,1. 7,2. 2和3. 7)。
通过MATLAB编写的程序,求解得到μ= 0. 391 0时模型的绝对误差最小,而不是传统GM( 1,1)模型假设的μ= 0. 5。根据最小二乘法得到: a =-0. 292 1,b = 6. 1×10-4,G = 6. 043 3×10-4,改进后的预测模型为X^( 1)( k + 1) = 6. 043 3×10-4×( 1-e-0. 292 1)-1× e0. 292 1k-2. 088 2×10-3。
对预测模型累减还原并预测,得到X^( 0)( 7) = 4. 7,则浇筑12'#块混凝土时的竖向位移预测值为-16. 3 mm,而实际浇筑12'#块后的竖向位移为-15. 5 mm,差值为0. 8 mm。160#墩浇筑段梁端竖向位移如表1所示,竖向位移预测值与实测值对比如图4所示。

图3 160#墩施工节段示意

表1 160#墩浇筑段梁端竖向位移mm

图4 160#墩浇筑混凝土时竖向位移预测值与实测值对比
3. 3结果分析
由表1和图4可以看出,浇筑混凝土时竖向位移的预测值与实测值之差在10 mm以内,最大误差为5. 1 mm。说明改进的灰色预测GM( 1,1)模型有很高的预测精度。
梁体悬臂施工阶段前期采用自适应控制理论对影响梁体变形的参数进行修正,其中强度等级为C55混凝土弹性模量的修正系数为1. 1,混凝土重度的修正系数为1. 12,修正后对4'#~8'#块进行控制;后期采用改进的灰色控制系统进行预测,得到合龙前梁体理想线形如图5所示。从图5中可以看出,梁体理论线形与实测线形吻合度高,边跨最大悬臂端的位移差值为20 mm,满足合龙要求。成桥后梁体完全符合平顺性要求。

图5合龙前梁体理想线形
4 结论
1)大跨度连续梁悬臂施工位移变化复杂,且无砟轨道桥梁对梁体平整度要求高,故采取合理的方法进行施工控制是必不可少的。
2)传统的灰色GM( 1,1)预测模型有理论缺陷,且桥梁施工预测的原始数列具有随机性,故本文采用多点滑动平均、自动寻优定权、最小二乘法对原始的灰色控制模型进行了修正。
3)采用全数据模型作为原始序列,通过工程实例对改进的灰色系统控制模型进行验证。结果表明,该模型具有较强的可操作性,预测精度高,对复杂的大跨度桥梁施工控制有很好的参考价值。
参考文献
[1]郑平伟,钟继卫,汪正兴.大跨度桥梁的施工控制[J].桥梁建设,2009(增2) : 19-22.
[2]葛耀君.分段施工桥梁分析与控制[M].北京:人民交通出版社,2003.
[3]向中富.桥梁施工控制技术[M].北京:人民交通出版社,2001.
[4]邓聚龙.灰理论基础[M].武汉:华中科技大学出版社,2002.
[5]张永水,顾安邦.灰色系统理论在连续刚构桥施工控制中的应用[J].公路,2001( 6) : 42-45.
[6]包龙生,李仲阳,于玲.大跨径预应力连续梁桥施工阶段预拱度[J].沈阳建筑大学学报(自然科学版),2013,29( 2) : 233-236.
[7]王常峰,陈兴冲,张文建,等.无砟轨道高速铁路桥梁线形控制技术研究[J].兰州交通大学学报,2010,29( 3) : 12-16.
[8]张熙胤,陈兴冲,王常峰.多变量GM( 1,n)模型在桥梁施工挠度控制中的应用[J].世界桥梁,2013,41( 5) : 76-80.
[9]樊新海,苗卿敏,王华民.灰色预测GM( 1,1)模型及其改进与应用[J].装甲兵工程学院学报,2003,17( 2) : 21-23.
[10]杨华龙,刘金霞,郑斌.灰色预测GM( 1,1)模型的改进及应用[J].数学的实践与认识,2011,41( 23) : 39-46.
[11]张大海,江世芳,史开泉.灰色预测公式的理论缺陷及改进[J].系统工程理论与实践,2002,22( 8) : 140-142.
[12]林智敏.大跨径预应力混凝土连续刚构桥施工控制研究[D].成都:西南交通大学,2005.
(责任审编郑冰)
Construction control over long-span bridge based on improved grey prediction GM ( 1,1) model
BAO Yijun1,WANG Changfeng2,ZHAO Jikang1
( 1.School of Civil Engineering,Lanzhou Jiaotong University,Lanzhou Gansu 730070,China; 2.School of Civil Engineering,Yantai University,Yantai Shandong 264005,China)
Abstract:T he background value and initial value of the GM ( 1,1) prediction model were refined by using least squares theory and automatic optimization.And the original sequence of the prediction was optimized by multi-point moving average,then an improvement construction grey control system of bridge was put forward.T he improvement construction grey control system was verified by using all-data model as original sequence in cantilever construction control of long-span bridge.T he results show that the maximum difference between the predicted displacement and the measured displacement is 5. 1 mm,and the theory values of linear of the beam before closure are closed to the measured values,completely meet the standard requirements of smoothness at finished stage.T his model can provide certain reference value for cantilever construction control of long-span bridges with strong operability and high prediction accuracy.
Key words:Long-span bridge; Cantilever construction; Construction control; Grey theoretical; GM ( 1,1) model improvement
文章编号:1003-1995( 2016) 02-0018-05
作者简介:包仪军( 1990—),男,硕士研究生。
基金项目:国家自然科学基金( 51368036)
收稿日期:2015-09-22;修回日期: 2015-12-14
中图分类号:U448.21
文献标识码:A
DOI:10.3969 /j.issn.1003-1995.2016.02.04
