面向地质灾害调查的无人机遥感影像处理软件比较
2016-04-11金鼎坚支晓栋王建超张丹丹尚博譞
金鼎坚, 支晓栋, 王建超, 张丹丹, 尚博譞
(中国国土资源航空物探遥感中心,北京 100083)
面向地质灾害调查的无人机遥感影像处理软件比较
金鼎坚, 支晓栋, 王建超, 张丹丹, 尚博譞
(中国国土资源航空物探遥感中心,北京100083)
摘要:为了给地质灾害调查中无人机(unmanned aerial vehicle,UAV)遥感影像处理软件的选择提供参考,对国内外使用较多的DPGrid,PixelGrid,DPMatrix和Inpho等4款软件进行了评价。以固定翼无人机搭载的Cannon 5D MARK Ⅱ相机获取的江西省龙南县丘陵地区1个架次644张无人机影像作为实验数据,由同一操作者在同一实验环境下分别使用上述4款软件进行了影像预处理、空三平差、数字高程模型(digital elevation model,DEM)生产及数字正射影像图(digital orthophoto map,DOM)生产等实验,从软件功能、效率、成果质量及操作流程等方面进行了对比分析。研究结果表明: 4款软件都具有完整的无人机遥感影像处理功能。在利用原始数据生成正射影像的处理效率方面,从高到低依次是Inpho,DPMatrix,DPGrid和PixelGrid; 在地质灾害应急调查方面,比较适宜使用DPGrid和DPMatrix进行快速拼图,而对于地质灾害详查,4款软件都能满足需要,其中DPGrid和PixelGrid更方便进行精度控制; 在数据处理方面,影像匀光匀色适宜使用Inpho和DPGrid,DEM和DOM成果编辑适宜使用DPGrid。
关键词:无人机遥感; 影像处理; 软件; 地质灾害
0引言
无人机(unmanned aerial vehicle,UAV)遥感具有灵活机动、安全高效、受天气影响小及使用成本低等特点,是对航天遥感和有人机航空遥感的有效补充,在地质灾害调查中有巨大的应用潜力[1-4]。但无人机影像存在畸变大、旋偏角大、重叠度不规则、像幅小及影像数量多等问题,使得无人机的数据处理十分困难[5-7]。
为了攻克上述难题,近年来市场上涌现出一大批无人机遥感影像处理软件,如国内的DPGrid,PixelGrid,DPMatrix,MAP-AT,FlightMatrix,GodWork,Heli-Mapping,Cloud-AT及GEOWAY for UAV; 国外的Inpho,Pix4Dmapper,PIEneering,PhotoMOD,LPS,IPS,SSK,Socetset,PixelFactory及LISA等。此外,还有PhotoModeler,PhotoScan,Bundler,APERO,Photosynth及VisualSFM等基于计算机视觉的近景摄影测量软件。这些软件的出现给数据处理者提供了许多选择,同时也带来了如何选择的问题。基于此,不同应用领域的研究者根据应用的需要对一些常用软件进行了评价分析。Gini等[8]通过对农村地区无人机影像的摄影测量处理,从连接点提取、光束法平差、产品生产等环节比较了LPS,Pix4UAV,PhotoScan和意大利国产的EyeDEA,Calge软件; Remondino等[9]从文化遗产三维建模角度评价了低成本的PhotoScan和开源的APERO,Bundler,Photosynth及VisualSFM 5款软件的性能和可靠性; Qin等[10]比较了LPS,APS,Inpho和APERO等软件对城区无人机影像的处理效果; Turner等[11]在使用GPS直接地理定位的情况下,从处理时间、易用性及生成的正射影像精度等方面比较了Photoscan,Pix4D和Bundler软件。以上这些研究主要针对三维建模和测绘等应用领域,且只比较了国外常用的无人机影像处理软件,针对地质灾害调查和国内无人机影像处理软件的报道很少。
无人机遥感在地质灾害调查中的应用主要包括地质灾害详细调查和地质灾害应急调查2个方面。应用于地质灾害详查的主要目的是利用无人机遥感影像数据生成数字高程模型(digital elevation model,DEM)和数字正射影像图(digital orthophoto map,DOM),用以进行地质灾害解译和孕灾背景分析。一般需要经过无人机影像预处理、影像匹配、带地面控制点的区域网空三平差、DEM和DOM生成等常规处理步骤,对最终成果的精度有一定要求。地质灾害应急调查主要是利用无人机遥感影像快速生成灾区全景影像,辅助应急救援和灾害评估。一般不进行精确的区域网平差和高精度DEM提取,仅在自由网平差后直接生成快速拼图或获得粗略的DEM后进行DOM快速生成。
本文从地质灾害遥感调查的角度,使用相同的实验数据和硬件环境,对国内优秀的DPGrid、PixelGrid和DPMatrix软件与国外先进的Inpho软件,从功能、效率、成果质量及操作流程等方面进行了分析比较,并对地质灾害调查中无人机影像处理软件的使用提出建议。
1无人机遥感影像处理软件简介
DPGrid是由中国工程院院士张祖勋提出并指导研制的新一代数字摄影测量系统,是最早开始研发和投入实验生产的影像处理系统,主要针对无人机、飞艇及直升机等低空遥感影像的内业处理,包含工程管理模块、自动空三模块及产品生产模块。其产品生产模块既可以按常规流程生成DEM和DOM,也可以直接生成快速拼图。
PixelGrid为中国测绘科学研究院开发的多源航空航天遥感数据集群分布式处理系统,其无人机数据处理模块能够完成影像预处理、自动空中三角测量、DEM自动提取、正射影像纠正、影像匀光匀色以及正射影像自动拼接的整个数据处理流程。
DPMatrix是由武汉大学研发的适用于地面近景和无人机低空遥感的摄影测量软件包,包括基于LCD的全自动相机标定软件、预处理软件、摄影测量软件、影像浏览器、DEM浏览器及三维浏览器等模块。其摄影测量软件既可按常规流程生成DEM和DOM,也可用投影拼接方式直接生成快速拼图。
Inpho软件是世界知名的数字摄影测量软件,功能强大而全面,其产品包括系统核心、空三加密模块、地理信息提取模块、地理建模模块以及正射影像生产与镶嵌模块。各模块既可以相互结合进行实践应用,又可以独立实现各自功能,并能够非常容易地整合到任何一个第三方工作流程中。
本文实验的无人机遥感影像处理软件版本为DPGrid_LAT(20131121版),PixelGrid 4.0,DPMatrix 2.0和Inpho 5.5。
2实验数据与环境
2.1实验数据
实验数据为江西省龙南县某测区的无人机遥感影像。测区属于低山丘陵地形,面积约18 km2,高差约350 m。影像由大白固定翼无人机搭载焦距为24.414 mm的Canon 5D MarkⅡ相机以600 m飞行航高获取,地面分辨率为12 cm,航向重叠度为75%~80%,旁向重叠度为50%~60%,飞行质量良好; 共1个飞行架次,12条航带,644张影像,影像清晰、层次丰富、反差适中且色调柔和。使用高精度GPS接收机,在野外实测控制点24个,挑选检查点30个。
2.2实验环境
实验环境为DELL M4700工作站,其配置见表1。
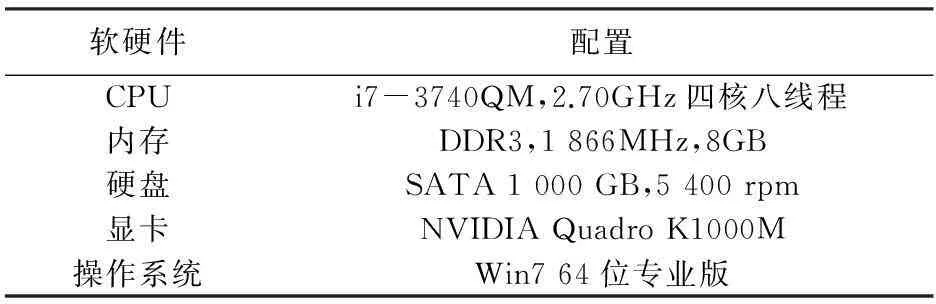
表1 实验环境配置
3无人机遥感影像处理
在使用相同的实验数据,且实验环境相同,参数设置一致的情况下,由同一操作者使用4种软件分别进行了无人机遥感影像处理实验。
3.1DPGrid无人机遥感影像处理
DPGrid无人机遥感影像处理流程如图1所示。

图1 DPGrid无人机影像处理流程
按DPGrid要求的格式,准备数据。新建DPGrid工程,根据提供的测区信息设置工程参数。使用多核并行模式进行影像预处理和全自动影像匹配。匹配结束后进行自由网平差和手工交互编辑,剔除误差较大的匹配点,在缺少点的地方则通过手工量测连接点。在自由网平差中误差达到小于0.5个像素之后,根据控制点点位,手工加刺控制点,进行区域网平差。平差结束后进行了2种方式的产品生产: 一种是在定位定姿系统(position orientation system,POS)数据辅助空三平差后直接生成快速拼图; 另一种是按照常规流程精细匹配生成DEM,然后再生成0.2 m空间分辨率的DOM。
3.2PixelGrid无人机遥感影像处理
PixelGrid无人机遥感影像处理流程如图2所示。

图2 PixleGrid无人机影像处理流程
按照PixelGrid软件要求的格式整理好原始数据后,首先进行畸变纠正、影像旋转及格式转换等数据预处理工作。然后进行空三加密,依次进行新建空三工程、设置工程参数、手动添加影像并划分航带、自动相对定向、模型连接; 手工确定航带间初始偏移量,保证航带首尾都有连接点,航带内约每隔10条基线添加1个点; 全自动航带间转点,进行连接点编辑,连接点要密集且分布均匀,并进行自由网平差解算,剔除错误的连接点,直至精度满足要求为止; 人工加刺控制点,进行区域网平差,精度合格后生成PixleGrid所需的工程文件。最后,进行产品生产,依次进行生成近似核线影像、影像自动匹配与DEM拼接、生成单独DOM、影像匀光匀色与拼接操作,最终生成空间分辨率为0.2 m的DOM。
3.3DPMatrix无人机遥感影像处理
DPMatrix无人机遥感影像处理流程如图3所示。

图3 DPMatrix无人机影像处理流程
在原始数据整理好后,首先在预处理软件中进行影像预处理,并根据POS数据自动创建航带和确定影像旋转关系。此时,可利用预处理软件中的一键处理功能直接生成快速拼图; 也可以在摄影测量软件中新建空三工程,进行全自动空三加密和编辑,再进行产品的生产。在摄影测量软件中分别实验了2种产品生产方式,一是按常规流程生成DEM和DOM; 另一种是采用投影拼接方式直接生成快速拼图。
3.4Inpho无人机遥感影像处理
Inpho无人机遥感影像处理流程如图4所示。

图4 Inpho无人机影像处理流程
Inpho 5.5只支持tif格式影像的处理,并且软件自身不提供畸变纠正工具,不生成和保存畸变纠正后的影像,只是在实际数据处理过程中,根据相机检校参数进行“动态畸变纠正”。因此,本实验在数据准备中,使用DPMatrix的预处理软件对原始影像进行了畸变纠正,并将纠正后的影像保存为tif格式。
原始数据准备好后,在Inpho的Applications Master中新建工程,进行工程设置,利用POS数据直接创建航带,生成影像金字塔,并确认航带及影像旋转是否正确; 然后,启动Match-AT模块,首先在没有量测控制点的情况下进行空三计算,在自动连接点提取和后处理得出比较稳定的连接点和外方位元素之后,再量测控制点,进行绝对定向; 再利用Match-T模块生成DEM,使用OrthoMaster模块进行影像正射纠正; 最后,在OrthoVista模块中完成正射影像的匀光匀色与镶嵌,得到整个实验区分辨率为0.2 m的DOM。
4实验结果分析
通过对同一实验数据的处理,从软件功能、处理效率、成果质量和操作流程等方面对4款软件进行了比较分析。
4.1功能分析
从功能上讲,4款软件均具有空三平差、DEM生成与编辑以及DOM生成与编辑等基本功能,但也存在一些功能差异。
1)DPMatrix具有基于LCD的相机检校功能,Inpho的inBLOCK模块也可以进行框幅式相机的校准,DPGrid和PixelGrid系统没有提供此功能。
2)DPGrid,PixelGrid和DPMatrix都具有影像畸变纠正功能; Inpho不提供直接影像畸变纠正,不生成和保存畸变纠正后的影像,只在影像处理中根据相机参数进行“动态畸变纠正”。
3)DPMatrix和DPGrid可以在平差后直接生成快速拼图; PixelGrid和Inpho不具有此功能,需要按常规流程生成DEM或者修改平差结果生成虚拟DEM,然后再生成DOM。
4)在DEM和DOM编辑方面,DPGrid能够将DEM和DOM放在同一窗口编辑,通过对小面积DEM数据的修改,实时重采样DOM,非常便于修图。其他3款软件都没有此功能。
5)DPGrid和PixelGrid软件对POS数据的利用率不高,主要用来辅助手动排列航带和辅助空三。DPMatrix和Inpho软件必须要有POS数据,否则无法进行自动连接点提取及平差; DPMatrix和Inpho软件还可以实现自动航带排列、自动确定影像的旋转方向和POS联合空三。
4.2效率分析
在数据处理实验过程中,对软件的每个应用步骤进行了耗时统计。使用同一实验数据和实验环境,由相同的实验者操作,按照常规流程,从原始数据到最后生成整幅DOM的时间统计如表2所示。

表2 4款软件的影像处理时间统计①
①表中影像处理时间既包括了机器自动运行时间,也包括了手动操作时间。Inpho的影像预处理时间包括生成金字塔80 min和用DPMatrix进行畸变纠正30 min。
从表2可以看出,4款软件由原始数据按常规流程生成DOM的处理效率从高到低依次是Inpho,DPMatrix,DPGrid和PixelGrid。Inpho的自动化程度较高,人工干预操作较少,运算速度较快; DPMatrix采用了GPU并行计算技术,速度也较快,主要是平差和DEM生成等步骤耗时比Inpho多; DPGrid的影像预处理和连接点量测采用了多核并行处理,运算速度非常快,但是平差剔除错点需要较多人工操作,密集匹配生成DEM极其耗时,因此总体耗时较多; PixelGrid空三平差阶段手动确定航带间初始点较耗时,DEM匹配生成也非常耗时,因此总体耗时最多。但不管哪款软件,DEM生成步骤都是非常耗时的,DPGrid和PixelGrid精细匹配生成DEM的时间分别长达841 min和806 min,这样的效率对于地质灾害应急监测是无法接受的。
实验中使用DPGrid和DPMatrix进行了快速拼图处理,在自由网平差后,不添加控制点,不生成高精度DEM,直接利用POS辅助平差结果快速生成正射拼图。整个流程DPGrid耗时181 min,DPMatrix常规快速拼图耗时216 min,DPMatrix一键处理耗时163 min,远远低于生成高精度DEM后再生成DOM的时间。这样的处理效率更适用于地质灾害应急监测。
PixelGrid和Inpho虽然没有直接提供快速拼图功能,但是可以在自由网平差之后修改平差结果文件,生成虚拟的DEM,然后利用虚拟DEM进行DOM生成。这样可以减少添加控制点和生成DEM的时间,PixelGrid耗时能从1 879 min缩短到约950 min,Inpho耗时能从499 min缩短到约320 min,但与DPGrid和DPMatrix的快速拼图相比,这个时间仍较长。
4.3成果质量分析
4款软件通过常规流程生成的DOM如图5所示(图中DOM均未经后期编辑)。

(a) DPGrid(b) PixelGrid

(c) DPMatrix(d) Inpho
图54款软件生成的DOM
Fig.5DOM generation from DPGrid,PixelGrid,DPMatrix and Inpho
通过目视判读可以看出,图5中4款软件生成的DOM拼接效果都很好,均没有明显的错缝; 从匀光匀色效果来看,Inpho和DPGrid生成的DOM色调均匀,反差适中; PixelGrid和DPMatrix生成的DOM色调效果稍差,稍有失真。将影像放大,可以看到在DPMatrix生成的DOM上,建筑物等存在较明显的扭曲,需要较多的后期编辑工作; 其他3款软件生成的DOM建筑物扭曲程度相对较小。此外,由于不同软件正射纠正时影像边缘裁切算法不同,最后生成的整幅DOM的空间覆盖范围略有差异。DPGrid和DPMatrix软件生成的快速拼图如图6所示。

(a) DPGrid(b) DPMatrix
图6DPGrid和DPMatrix软件生成的快速拼图
Fig.6Fast mosaic images from DPGrid and DPMatrix
DPMatrix按常规流程生成的快速拼图和一键快速拼图的效果基本相似,图6只显示了DPMatrix按常规流程生成的快速拼图。与DOM相比,快速拼图上有明显的接边缝,影像色调也不够均匀。但与DPMatrix相比,DPGrid生成的快速拼图色调更自然。
手动量测检查点在正射影像上的平面坐标,并与野外实测坐标比对,对软件生成的正射影像(DOM_DPGrid,DOM_PixelGrid,DOM_DPMatrix,DOM_Inpho)和快速拼图(快拼_DPGrid,快拼_DPMatrix)的平面几何精度进行检查。共使用了30个检查点,各产品的平面中误差和最大误差统计如表3所示。

表3 成果平面误差统计
从表3可以看出,各软件生成的DOM的平面精度均较高,都可以满足一般地质灾害调查的需要。其中精度最高的是DPGrid; PixelGrid,DPMatrix和Inpho的平面精度稍低。如果考虑到人工在影像上刺检查点时,也会人为引起0.5~1个像素(0.1~0.2 m)的偏差,那么可以认为这些软件生成的DOM的误差差别是很小的。
快速拼图的平面几何精度远低于DOM,中误差都在20个像素以上。DPMatrix快速拼图的最大平面误差达到14.67 m。这主要是因为没有使用地面控制点,而无人机自带的导航POS数据精度不够。这种精度的快速拼图很难直接用于地质灾害的精确解译,一般需要后期使用其他已纠正好的影像或地形图为参考,对其再进行几何精纠正。
4.4操作流程分析
DPGrid软件操作流程简单,在统一的界面下进行各数据处理操作。影像预处理、影像匹配、DEM生成和DOM生成等都具有较高的自动化水平,并且对中间结果进行了压缩,占用磁盘空间很少。但是DPGrid软件的手动排列航带操作较繁琐,并且软件的开放性不够,预处理后的影像并不能用其他软件打开,生成的DEM和DOM都使用软件自身的数据格式,要得到通用格式的影像数据必须进行后期的数据转换。
PixelGrid软件的模块划分明确且步骤简明,但空三加密中新建工程、排列航带、航带间初始偏移量确定等手动步骤耗时。在软件操作过程中,质量控制手段较多,但处理过程较稳定。
DPMatrix操作流程简单,自动化程度较高,可以利用POS数据自动排列航带,自动对影像进行旋转,对于生成快速拼图甚至有一键处理功能。
Inpho软件的自动化程度很高,人工交互操作较少,但是Inpho平差中人工编辑少,反而并不有利于精度控制。Inpho 5.5软件不支持原始jpg格式影像,一般需要先在其他软件中对影像进行畸变纠正和格式转换后,再用Inpho处理。
5结论
本文以江西省龙南县某实验区的无人机影像为例,对国产的DPGrid,PixelGrid,DPMatrix和国外的Inpho 4款软件进行了数据处理实验,利用4款软件从原始数据按常规流程生成了高精度DOM,并利用DPGrid和DPMatrix生成了快速拼图,从功能、效率、成果质量及操作流程等方面对实验结果进行了分析,分析结果表明:
1)4款软件都具有完整的无人机遥感影像处理功能,成果质量均能满足常规地质灾害调查的需要; 4款软件按常规流程生成DOM的处理效率从高到低依次是Inpho,DPMatrix,DPGrid和PixelGrid; 使用DPGrid和DPMatrix在自由网平差后直接生成快速拼图能极大缩短处理时间; 软件操作的大部分步骤都具有较高的自动化水平,手动添加控制点和高精度DEM的生成是数据处理中比较繁琐和耗时的步骤。
2)对于地质灾害发生初期的应急处置和灾情快速评估来说,比较适宜采用DPGrid和DPMatrix软件进行快速拼图生产; 如果要使用PixelGrid和Inpho软件,建议在自由网平差后不进行DEM的生成,而是采用虚拟DEM直接生成DOM,这样能大大缩短处理时间。
3)对于地质灾害详查,4款软件都能满足需要。其中DPGrid和PixelGrid更方便进行精度控制,Inpho和DPGrid影像的匀光匀色效果更好,DPGrid更适宜DEM和DOM成果编辑。
4)随着POS设备的小型化和精度的提高以及计算机并行处理技术和影像匹配算法的进步,无人机遥感影像处理软件将逐步走向高自动化、高效率和高精度,并在地质灾害无人机遥感监测中发挥更大的作用。
参考文献(References):
[1]Colomina I,Molina P.Unmanned aerial systems for photogrammetry and remote sensing:A review[J].ISPRS Journal of Photogrammetry and Remote Sensing,2014,92:79-97.
[2]李德仁,李明.无人机遥感系统的研究进展与应用前景[J].武汉大学学报:信息科学版,2014,39(5):505-513.
Li D R,Li M.Research advance and application prospect of unmanned aerial vehicle remote sensing system[J].Geomatics and Information Science of Wuhan University,2014,39(5):505-513.
[3]Niethammer U,James M R,Rothmund S,et al.UAV-based remote sensing of the Super-Sauze landslide:Evaluation and results[J].Engineering Geology,2012,128:2-11.
[4]韩文权,任幼蓉,赵少华.无人机遥感在应对地质灾害中的主要应用[J].地理空间信息,2011,9(5):6-8.
Han W Q,Ren Y R,Zhao S H.Primary usages of UAV remote sensing in geological disaster monitoring and rescuing[J].Geospatial Information,2011,9(5):6-8.
[5]Turner D,Lucieer A,Watson C.An automated technique for generating georectified mosaics from ultra-high resolution unmanned aerial vehicle(UAV) imagery,based on structure from motion(SfM) point clouds[J].Remote Sensing,2012,4(12):1392-1410.
[6]Hardin P J,Jensen R R.Small-scale unmanned aerial vehicles in environmental remote sensing:Challenges and opportunities[J].GIScience & Remote Sensing,2011,48(1):99-111.
[7]何敬,李永树,鲁恒,等.无人机影像地图制作实验研究[J].国土资源遥感,2011,23(4):74-77.doi:10.6046/gtzyyg.2011.04.14.
He J,Li Y S,Lu H,et al.Research on producing image maps based on UAV imagery data[J].Remote Sensing for Land and Resources,2011,23(4):74-77.doi:10.6046/gtzyyg.2011.04.14.
[8]Gini R,Pagliari D,Passoni D,et al.UAV photogrammetry:Block triangulation comparisons[C]//International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,Volume XL-1/W2,2013:157-162.
[9]Remondino F,Del P S,Kersten T P,et al.Low-cost and Open-Source Solutions for Automated Image Orientation:A Critical Overview[M]//Ioannides M,Fritsch D,Leissner J,et al.Progress in Cultural Heritage Preservation,Lecture Notes in Computer Science.Berlin,Heidelberg:Springer,2012:40-54.
[10]Qin R J,Grün A,Huang X F.UAV project-building a reality-based 3D model[J].Coordinates,2013,9(1):18-26.
[11]Turner D,Lucieer A,Wallace L.Direct georeferencing of ultrahigh-resolution UAV imagery[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(5):2738-2745.
(责任编辑: 刁淑娟)
Comparison of UAV remote sensing image processing software for geological disasters monitoring
JIN Dingjian, ZHI Xiaodong, WANG Jianchao, ZHANG Dandan, SHANG Boxuan
(ChinaAeroGeophysicalSurveyandRemoteSensingCenterforLandandResources,Beijing100083,China)
Abstract:Unmanned aerial vehicle (UAV) remote sensing has a great application potential in geological disasters monitoring. A plenty of software for UAV image processing has appeared on the market in recent years. In order to provide a valuable reference for choosing UAV image processing software for geological disasters monitoring, the authors evaluated the mostly used software DPGrid, PixelGrid, DPMatrix and Inpho. A block of 644 UAV images of hilly areas acquired in Longnan County of Jiangxi Province by Cannon 5D MARK Ⅱ camera on board a fixed-wing UAV at a flying height of 600 m were used as test data. The preprocessing, aerial triangulation, DEM and DOM generation of these images were performed by one operator using the aforementioned software in the same test environment, then these kinds of software were analyzed in terms of function efficiency, product quality and workflow. The results show that all of these kinds of software have complete UAV image processing capability and the order of processing efficiency from high to low is Inpho, DPMatrix, DPGrid and PixelGrid. For geological disasters emergency survey, it’s better to use DPGrid and DPMatrix to generate fast mosaic. For detailed geological disasters survey, all of these kinds of software can meet the requirement while DPGrid and PixelGrid are more suitable for precision control, Inpho and DPGrid are more suitable for brightness balance and color adjustment, and DPGrid is more suitable for editing DEM and DOM.
Keywords:UAV remote sensing; image processing; software; geological disasters
作者简介:第一 金鼎坚(1985-),男,助理工程师,主要从事国土资源无人机遥感调查方面的研究。Email: jindingjian@uavrs.net。
中图法分类号:TP 79
文献标志码:A
文章编号:1001-070X(2016)01-0183-07
基金项目:国土资源部公益性行业科研专项经费项目“低空遥感平台地质灾害应急监测技术体系研究与示范”(编号: 201011020)资助。
收稿日期:2014-09-09;
修订日期:2014-11-25
doi:10.6046/gtzyyg.2016.01.27
引用格式: 金鼎坚,支晓栋,王建超,等.面向地质灾害调查的无人机遥感影像处理软件比较[J].国土资源遥感,2016,28(1):183-189.(Jin D J,Zhi X D,Wang J C,et al.Comparison of UAV remote sensing imagery processing software for geological disasters monitoring[J].Remote Sensing for Land and Resources,2016,28(1):183-189.)
