智能实验汽车执行机构的设计*
2016-04-11崔文锋陈永尚
管 欣,崔文锋,贾 鑫,洪 峰,陈永尚
(吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
2016211
智能实验汽车执行机构的设计*
管 欣,崔文锋,贾 鑫,洪 峰,陈永尚
(吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
针对在量产车基础上增加执行机构改装成的具有自主驾驶功能的智能汽车,提出执行机构的功能要求,并为各辅助操控机构设计了一整套解决方案。采用MicroAutoBox作为执行控制器,以实现执行机构的集成。针对制动系统的强非线性,提出了基于压力外环的主缸压力控制策略。基于LabWindows开发了智能车远程监控界面。实验结果表明,所设计的执行机构精度较高、响应较快、功能全面,能较好地满足智能汽车实验要求。
智能车;执行机构;主缸压力控制;远程监控
前言
在智能汽车技术研究中,开展实车实验是验证感知系统和控制策略的重要手段。当前智能车技术还处在研究阶段,市场上还没有能够直接用于研究智能驾驶的车辆。因此,基于普通量产车加装执行机构,实现自主驾驶是一个重要途径。执行机构作为智能驾驶系统决策得出目标控制量的最终执行者,其执行效果直接影响整体性能,是实现智能驾驶的关键技术之一[1]。
目前,多数关于智能车的研究都将重点放在感知和控制策略上,对执行机构及其性能研究较少。文献[2]中实施了油门、制动、方向和挡位的控制,利用EPS助力电机实现转向的控制,但该电机提供的转向力矩有限,不满足所有工况的转向需求。文献[3]中提出了包括灯光和喇叭等在内的整套改装方案,但方案占用驾驶室空间较大,存在加装的转向机构逆效率低的问题。国外对智能车研究较为深入,多采用合作方式,整车厂开放控制接口,由原车的ECU和执行器等实现自主驾驶。国内近年也出现校企联合研究智能车的实例[4],但普及率不高。在汽车场地实验用驾驶机器人领域,也有实现无人驾驶的驾驶机器人[5],这类系统控制精度高,但多采用在驾驶室安装的方案,占用空间大,且控制机构少。
本文中针对基于量产车改装成智能车这一思路,提出执行机构的功能需求,进而对汽车各个操控机构设计了一套完整解决方案。采用MicroAutoBox作为执行控制器,实现了执行机构的集成。针对汽车制动系统的强非线性,提出了制动执行机构基于位置内环主缸压力外环的控制策略。为对智能车进行监控和实验,开发了一套用于远程监视和控制介入的监控界面程序。实验结果表明,所设计的执行机构满足功能需求,具有较高控制精度和响应速度。
1 功能定义与总体方案
1.1 执行机构功能定义
智能驾驶技术要求执行机构具备以下功能。
系统独立:执行机构是不依赖上层控制器而能实时独立运行的系统,不会因上层控制系统的故障而失效。
功能完备:能够实现对车辆各个必要操纵系统的改装,实现完备的控制,满足各种智能驾驶实验需求。
接口开放:能对上层控制器开放接口和协议,并允许对系统进行配置,如只研究纵向控制时可以关闭对方向的控制。
高性能:对车辆操控效果有关键影响的系统,执行机构要具有较高的控制精度和响应速度,如转向和制动的控制,既要快速又要准确。
安全可靠:加装的执行机构对原车性能影响要小,不能降低车辆可靠性;执行机构要有多套急停装置,且能实施远程遥控急停。
人机协调:改装后的车辆,既要能实施自主驾驶,也要保留正常驾驶功能;自主驾驶时,执行机构要能识别驾驶员操作并允许驾驶员随时介入对汽车的控制;执行机构占用驾驶室空间要小,不妨碍人的正常操作,同时兼顾美观。
1.2 执行机构总体方案
基于以上需求分析,设计的智能车执行机构总体方案如图1所示。
采用MicroAutoBox作为执行控制器,它具有接口多、运行实时和开发方便的特点,可以直接把Simulink模型生成实时代码下载到控制器中运行。执行控制器与上位机通过以太网通信。各个执行子系统分别通过电机或电路实现,它们通过CAN总线或IO接口与MicroAutoBox相连。为实现正常驾驶与自主驾驶模式的切换,加入了切换开关。为保证安全,在车内外布置了多个急停开关。为从车外对智能车进行操控介入和急停,加入了遥控器。为实施远程监控,加入了4G模块并开发了远程监控软件,通过互联网和中心服务器,实现远程监控计算机与自主车的实时通信。为利用车辆本身的传感信息和状态信息,将车载CAN总线接到执行控制器中。
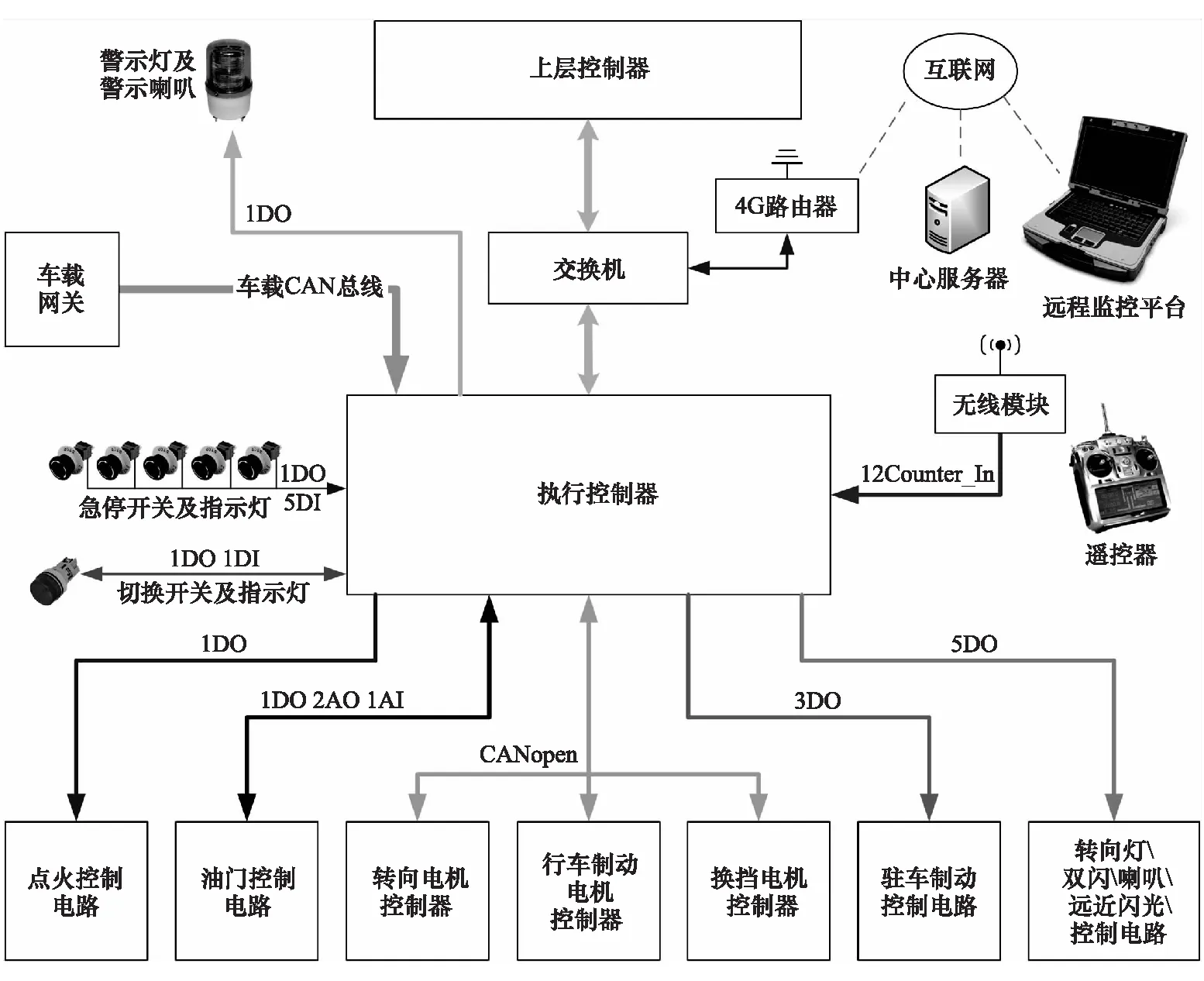
图1 执行机构总体架构
执行机构提供了驾驶员手动驾驶、自主驾驶、遥控驾驶和监控平台远程控制4种模式。不同模式优先级不同,自主驾驶模式优先级最低,可以随时切换到其它驾驶模式,以保证安全。
2 执行机构子系统
2.1 转向子系统
转向执行机构实施对车辆的方向控制,对机构响应速度和控制精度要求高。文献[5]中提到的ABD转向机器人采用转矩电机不加减速机构直接控制转向盘,这种设计对原车结构和性能影响最小,但安装复杂,占用空间大。本文中设计出利用空心轴转矩电机直接驱动转向柱的方案。电机套装在转向柱末端,安装状况如图2所示。由于没有传动机构,不存在逆效率问题和传动间隙问题,具有最佳的控制效果。同时不占用驾驶空间,不影响驾驶员的操作。所选择的转矩电机能够提供最大10N·m的转矩,满足控制需求。

图2 转向机构安装状况
电机控制采用基于位置环、速度环和电流环的串级控制方式[6],位置环采用比例控制,速度环和电流环采用PI控制。控制器通过CANopen与执行控制器进行通信。对控制效果进行实验验证,给定转角输入为60°阶跃信号时的响应效果如图3所示。从图中可以看出,所设计的转向执行机构可以快速、精确地响应目标指令,经约100ms即可达到目标位置,稳态误差为零,可满足智能驾驶对制动执行机构的需求。
2.2 制动子系统
制动执行机构对于保证安全起关键作用。因此要求制动执行机构可靠性高,系统能提供最大的制动力满足紧急制动的需求,加装的执行机构不能影响原车制动系统性能,且要保证驾驶员可随时介入对制动系统的控制,实现紧急停车。
文献[7]~文献[9]中提出用电子真空助力器(EVB)施加制动的方案。但EVB响应较慢,且存在较大非线性,不能满足对制动响应速度的要求。文献[10]和文献[11]中提出一种利用电磁阀控制的液压执行机构。这种机构占用空间小,但对原车制动系统做出了较大的改动,不利于原车制动系统的可靠性和安全性。文献[12]中提出利用电机带动绕线器拉动制动踏板的方案,但占用驾驶室空间。

图4 制动执行机构示意图
本文中分析了制动系统模型,提出用电动缸通过拉线拉动制动踏板施加制动控制,并通过主缸压力反馈形成控制闭环的方案。电动缸安装在车辆地板下方,通过滑轮改变拉线方向最终拉动制动踏板,如图4所示。该方案不占用驾驶室空间,在制动主缸与ESP控制器之间安装压力传感器以采集主缸压力。拉线采用软质钢丝,在自主驾驶时,驾驶员可随时介入制动控制。
2.2.1 制动系统模型
制动力矩与制动压力成正比[13],即
Tb=Kbpw,des
(1)
式中:Tb为制动力矩;Kb为比例系数;pw,des为目标制动压力。
忽略轮缸的非线性和动态特性,以及制动管路的特性,可认为在低频下,制动主缸压力等于制动压力,即
(2)
式中pmc,des为主缸压力。
不考虑制动踏板回位弹簧的影响时,可将制动踏板简化成杠杆模型,即
Fp=FbL1/L3
(3)
式中:Fp为真空助力器控制阀推杆推力;Fb为制动踏板力;L1为踏板输入力到支点的距离;L3为真空助力器控制阀推杆到支点距离。
真空助力器控制阀推杆位移与控制阀推杆推力的关系[14]为
(4)
式中:x为真空助力器控制阀推杆位移;xvb_free为真空助力的空行程;Fcut_in为始动力;Fvb_first为真空助力控制阀推杆回位弹簧预紧力。
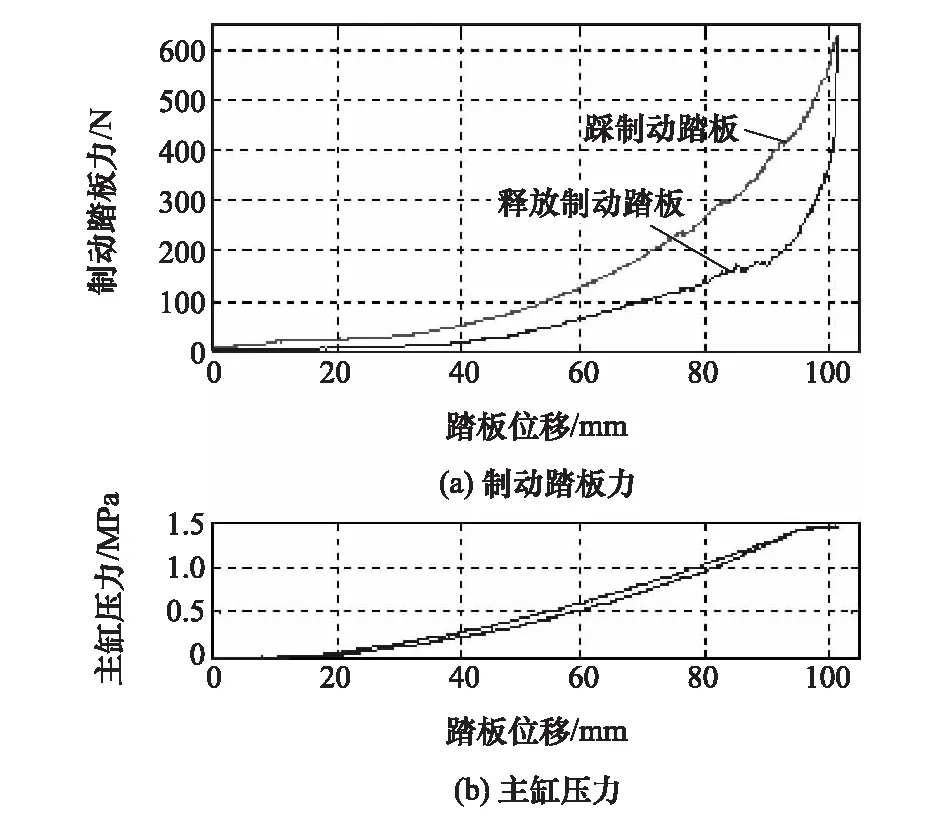
图5 制动踏板力和主缸压力与踏板位移的关系曲线
由于真空助力器存在较强的迟滞特性[15],使制动踏板位移与制动踏板力之间也存在迟滞特性,实验测得该对应关系如图5(a)所示。这种特性使得控制难度增大,普通控制器无法取得较好的控制效果,而实验发现踏板位移与制动主缸压力之间的关系比较接近单调特性,如图5(b)所示。
2.2.2 制动控制策略
为给上层控制器提供一个线性被控对象,根据式(2),选择制动主缸压力为闭环控制对象。根据图5(b)所示主缸压力与踏板位置之间的单调函数关系,采用主缸压力闭环包容位置环的串级控制结构[16]。控制器结构如图6所示。
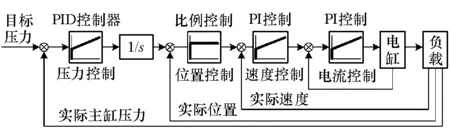
图6 制动执行机构控制器结构
控制器输入为目标主缸压力,主缸压力控制器采用PID控制,控制器输出为制动踏板速度,经过积分变成目标踏板位置。位置控制器及其内部采用与转向执行机构相同的三环控制方法。
对制动执行机构性能进行实验验证,用阶跃信号作为制动执行机构的输入,通过对比期望压力与实际制动压力来验证辅助制动系统性能。图7为实验结果曲线。由图可见,制动执行机构可快速、精确地响应制动指令,大约100ms即可达到目标压力,200ms即可稳定,稳态误差为零,可满足智能驾驶对制动执行机构的需求。
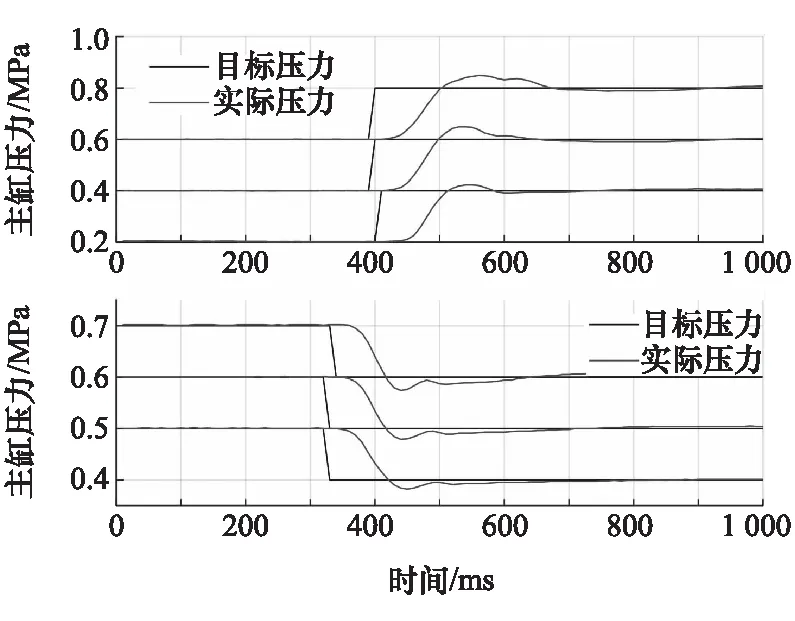
图7 主缸压力阶跃响应曲线
2.3 油门子系统
改装的SUV使用电子节气门,它传给发动机的信号是与踏板位移呈线性关系的两路模拟电压信号。据此特性,只要能提供适当模拟电压给发动机ECU即可实现对油门的控制。文献[17]中提出一种用单片机模拟踏板位移量的方案,但该方案未考虑保留原车电子节气门正常驾驶功能。本文中采用在加速踏板位置传感器输出端与发动机ECU之间增加多路切换器的方案,如图8所示。
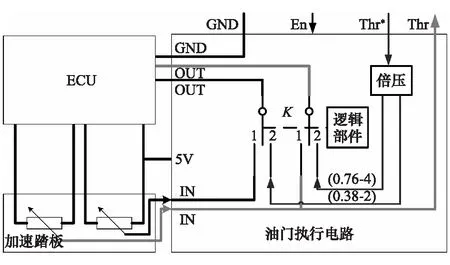
图8 油门执行电路示意图
当使能端为高电平时,油门执行电路的多路切换器切换到执行控制器模拟电压输出端口,执行控制器改变电压值相当于改变加速踏板位移,因此可实现自主驾驶。使能端为低电平或执行机构不工作时,多路切换器切换到加速踏板输出端,此时为手动驾驶模式。
采用电压比较器作为逻辑部件,它采集加速踏板输出信号,当检测到踏板被踩下时,逻辑组件将多路切换器切换到加速踏板传感器一端,实现驾驶员控制的介入。
2.4 换挡执行机构
因SUV采用自动变速器,且挡杆只做一个方向推拉运动,故通过步进电机带动曲柄连杆与挡杆构成四连杆机构实现挡位的控制,如图9所示。为了美观和不占用驾驶室空间,执行机构安装在中央扶手箱的杯座下方空间中,而杯座则改装成电源和USB接口的插座,从驾驶室看不到换挡机构的存在。由于步进电机不经减速器直接带动换挡手柄,所以逆效率高,不影响驾驶员的换挡操作。
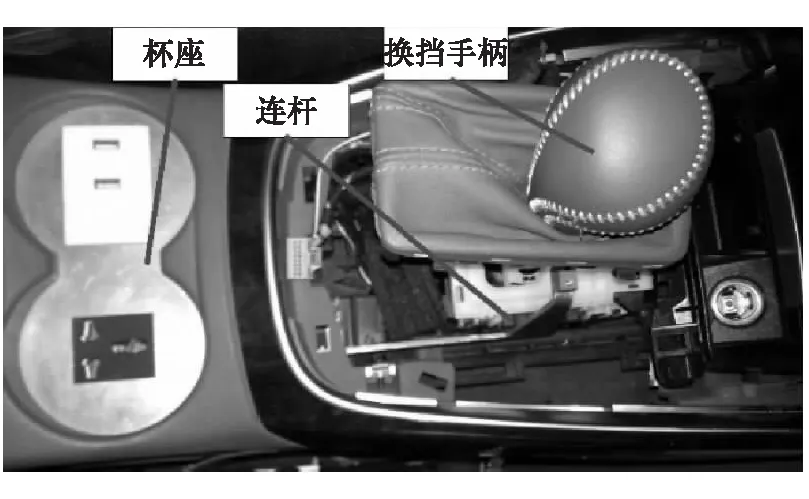
图9 换挡执行机构
2.5 辅助操控机构
所改装的SUV采用无钥匙起动系统,驻车制动系统为电子驻车。它们操作按钮内部电路都是简单的开关结构。因此通过在原车线束上并联继电器,由执行控制器通过DO信号即可实现对点火和驻车制动的控制。同理,电子驻车、转向灯、喇叭、双闪和远近闪光的控制也都是通过类似的方式在控制电路上关联继电器实现无人控制。
3 远程监控平台
监控平台主要实现车辆远程控制介入、状态实时监视和数据记录等功能[18]。本文中采用LabWindows软件开发控制界面程序,如图10所示。该程序能实现模式选择、车辆信息显示、远程急停和远程控制功能。该程序与执行控制器之间通过固定IP的中心服务器中转数据,实现无人车与远程监控平台的通信[19]。
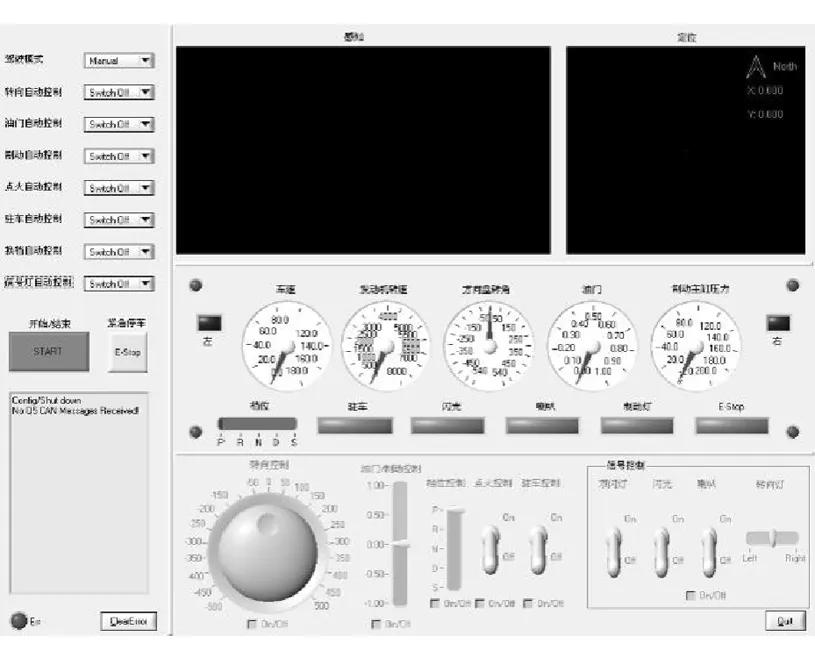
图10 远程监控界面
4 总体控制策略
在Simulink下开发了执行机构的总体控制程序。通过RTI模块实现网络通信、CAN通信和IO控制。通过StateFlow实现不同控制模式之间的切换控制和急停控制,切换逻辑如图11所示。
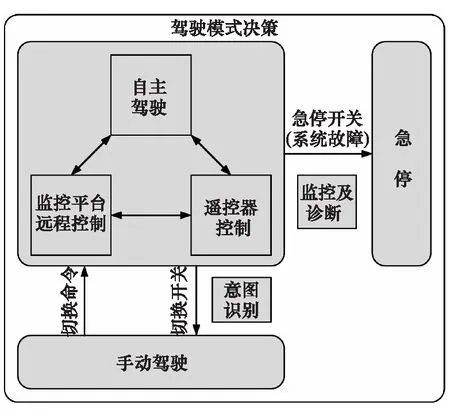
图11 驾驶模式切换逻辑
5 结论
本文中在量产汽车的基础上改装成可自主驾驶的智能汽车实验平台,分析了执行机构的功能需求,并提出一套完整的解决方案。
所有加装机构均不影响车辆正常驾驶,也不占用驾驶室空间,并全部实现隐蔽安装,看不出改装痕迹。
针对制动系统存在强非线性和迟滞特性的特点,提出基于主缸压力外环、位置内环的控制结构。对智能驾驶系统来说,制动系统变成一个线性被控对象,简化了上层控制的复杂度。
[1] CHENG Hong. Autonomous intelligent vehicles theory, algorithms, and implementation[M]. London: Springer London,2011.
[2] 黄建.无人驾驶车转向控制的研究[D].武汉:华中师范大学,2013.
[3] 赵盼.城市环境下无人驾驶车辆运动控制方法的研究[D].合肥:中国科学技术大学,2012.
[4] 熊光明,高利,吴绍斌,等.无人驾驶车辆智能行为及其测试与评价[M].北京:北京理工大学出版社,2015.
[5] 余贵珍,冀浩,周彬.自动驾驶机器人关键技术及应用[J].科技导报,2015,33(21):72-75.
[6] 廖晓钟,刘向东.控制系统分析与设计[M].北京:清华大学出版社,2008.
[7] IIJIMA T, HIGASHIMATA A, TANGE S, et al. Development of an adaptive cruise control system with brake actuation[C]. SAE Paper 2000-01-1353.
[8] 张德兆.基于电子真空助力器的汽车驾驶辅助系统制动压力控制[J].汽车工程,2011,33(12):1067-1072.
[9] YI Kyongsu, KWON Young Do. Vehicleto-vehicle distance and speed control using an electronic-vacuum booster[J]. JSAE Review,2001,22(4):403-412.
[10] 高锋.基于高速开关阀的电控汽车辅助制动系统[J].清华大学学报(自然科学版),2004,44(11):1532-1535.
[11] 裴晓飞,刘昭度,马国成,等.基于节气门与制动联合控制的自适应巡航控制系统[J].汽车工程,2013,35(4):375-380.
[12] JIN X, SU Z, ZHAO X, et al. Design of a fuzzy-PID longitudinal controller for Autonomous Ground Vehicle[C]. IEEE International Conference on Vehicular Electronics & Safety,2011:269-273.
[13] YI Kyongsu, HONG J, KWON Y D. A vehicle control algorithm for stop-and-go cruise control[C]. Proc Instn Mech Engrs. Oakland, CA,2001:478-482.
[14] 刘晓.基于特性的制动系统动态建模与分析[D].长春:吉林大学,2012.
[15] GERDES J, HEDRICK J. Brake system modeling for simulation and control[J]. Journal of Dynamic Systems, Measurement, and Control,1999,121(3):496-503.
[16] 叶正茂,赵慧,张尚盈,等.基于位置内环的柔顺力控制的研究[J].控制与决策,2006,21(6):651-655.
[17] 陶斯祺.无人驾驶智能车油门控制系统研究[D].西安:长安大学,2013.
[18] 赵丹丹.无人驾驶智能车远程监控系统[D].西安:西安工业大学,2014.
[19] GE Y, XUE W, SHU Z. Improved system for parknet mobile network[C]. Proceedings of the FISITA 2012 World Automotive Congress, Nov.2012:131-145.
Design of Actuators for Experimental Intelligent Vehicle
Guan Xin, Cui Wenfeng, Jia Xin, Hong Feng & Chen Yongshang
JilinUniversity,StateKeyLaboratoryofAutomotiveSimulationandControl,Changchun130022
The functional requirements of actuators are proposed for an intelligent vehicle with autonomous driving function retrofitted by adding actuators on a mass-produced vehicle, and a complete set of solving scheme for all auxiliary handling mechanisms is designed. MicroAutoBox is used as actuator controller to fulfill the integration of actuators. In view of the strong nonlinearity of brake system, a control strategy for master cylinder pressure is put forward based on pressured outer ring, and a remote monitoring interface for intelligent vehicle is developed based on LabWindows. The results of experiments show that the actuators designed have higher accuracy, quicker response and all-around functions and can better meet the requirements of intelligent vehicle experiments.
intelligent vehicle; actuators; master cylinder pressure control; remote monitoring
*教育部长江学者和创新团队发展计划(IRT0626)资助。
原稿收到日期为2016年3月30日,修改稿收到日期为2016年6月6日。
