基于贝叶斯聚类的高速列车横向稳定性识别方法及其实时在线监测装置
2016-04-10甘敦文
甘敦文
(北京纵横机电技术开发公司,北京 100081)
近年来,随着列车运行速度的不断提高,系统的强非线性特征使得高速列车的动力学响应对外部的激励愈发敏感[1],从而导致转向架构架或轮对的稳定性问题越来越突出。因此,实时在线监测运营中高速列车的横向运动稳定性以防止发生横向失稳至关重要[2],并且已成为国内外铁路的共识。
在德国、日本等铁路发达国家,高速列车上都配备有用于监测横向失稳的设备。目前应用于我国CRH1,CRH2和CRH3系列高速动车组的失稳检测装置大多来自川崎重工、庞巴迪和西门子公司,因此迫切需要研究高速列车横向稳定性识别方法,并在此基础上研制具有自主知识产权的高速列车横向稳定性实时在线监测装置。
1 既有高速列车失稳监测装置的现状及存在问题
1)判据准确性不足,易出现误报警
根据《动车组失稳检测装置暂行技术条件》,目前应用于我国CRH1,CRH2和CRH3系高速动车组的失稳检测装置虽然因采用的标准不同而在横向稳定性的判据上略有差异,但归根结底都是依据车体或构架横向力或横向加速度的阈值判断高速列车是否失稳的。如西门子和庞巴迪的失稳监测系统依据的是TSI L 84《欧洲高速列车子系统可交互性技术规范》的规定,当轮对中心线轴箱上方构架横向加速度经3~9 Hz滤波后其峰值连续10次超过0.8g时,则认为高速列车发生横向失稳;而川崎重工则以构架横向加速度经2~12.6 Hz滤波后其半波有连续10次以上的峰峰差值达到或超过20 m·s-2为失稳条件。由于高速列车的横向运动稳定性是一个复杂的系统问题,在实际运营过程中,轮轨型面会发生磨耗,车辆结构及悬挂部件参数以及线路条件会发生变化,达到临界速度时构架的横向加速度也会发生变化,因此用单一的理论公式或固化的判别标准难以彻底实现高速列车横向稳定性状态的准确识别。
2)原始数据不保存或保存过少,对地面数据分析支持度不够
目前既有的高速列车失稳检测装置,虽然可以采集、处理和判断车辆横向加速度信号,但对报警及历史数据的分析支持度不好(如川崎重工的失稳监测设备仅对失稳前1.6 s的数据进行存储),部分型号甚至不对报警数据进行记录(如西门子的失稳监测系统集成在制动控制单元BCU内,不对数据波形进行存储)。高速列车的横向加速度信号中夹杂着不确定的干扰与外部激励,报警信息仅根据单列车的单次监测数据进行判定,这无形中又提高了系统的误报率。同时,由于没有数据存储功能,而无法建立列车实时数据库及地面数据库,因而不能提供单节车厢转向架失稳状态的历史纵向比较以及同列车不同车厢之间失稳状态的横向对比,失去了对地面检修的指导作用。因此目前既有的硬件平台无法满足对报警信息的数据分析需求。
2 基于贝叶斯聚类的高速列车横向稳定性识别方法
根据大数定律,无论符合哪种概率类型的独立同分布变量,只要点数足够大,其和都服从高斯分布。对于高速列车来说,引起车辆横向振动的因素很多,但如果将构架、轮对及驱动系统的摇头、侧摆等运动对横向振动的贡献视为1个数据集的话,那么列车的横向加速度则是该数据集的和在外部的表现。因此基于高斯分布对车辆横向加速度分布进行建模能够取得很好的拟合效果。故本文提出参考UIC 518—2005及铁运[2008]28号文件中对车辆横向振动本征值的定义,以高速列车车辆横向加速度经8~10 Hz滤波后的半波信号有效值作为特征参数、以车载实时数据库为工具,从统计学的角度实现对不同工况下高速列车横向稳定性的自适应判别。
2.1 高速列车高斯混合振动模型
根据车辆稳定性状态的不同,可将列车运行时监测到的车辆横向加速度信号分为正常模式、预警模式和报警模式3种模式,对监测到的数据进行统计分析,就可以得到车辆横向加速度统计模型[2]。根据中国铁道科学研究院大量实验数据的分析表明:车辆横向加速度具有很强的高斯统计特性,并且在失稳状态下高速列车高斯混合振动模型(以下简称GMM)较单一的高斯模型更接近实际情况。
根据车辆横向加速度信号的特性,其方程可以近似表示为
活动是德育课程实施的重要载体,也是学生主体性生成和发展的源泉。《新课程标准》指出:“课程设计与实施注重联系学生的生活实际,引导学生在实践中发现和提出问题,在亲身参与丰富多样的社会活动中,逐步形成探究意识和创新精神。”这从课程理念的高度,充分肯定了活动是德育课教学之必需。随着课标的深入落实,活动成了德育课教与学的中介,在课堂上教师通过活动来创设教学情境,使抽象的概念具体化,使传授的方式趣味化,使认知与情感融合化,使思维与形象统一化。活动符合小学生的认知特点,有利于学生主体人格的形成,从而促进学生知、情、意、行的全面发展。
=k1g1(x,μ1,σ1)+k2g2(x,μ2,σ2)+
k3g3(x,μ3,σ3)
(1)
式中:θ为模型中的未知参数;p为横向加速度信号的模式;gp(x,μp,σp)为横向加速度信号在模型中的1个组元,其中x为横向加速度信号(点数为N个),μp和σp分别为该组元中的高斯均值和方差;k1,k2和k3为加权系数。
由式(1)可知:①当k2=k3=0或趋近于0时,模型可近似用高斯模型表示,此时认为横向加速度信号分布只存在稳定模式,即车辆横向稳定性较好。②当k2或k3≠0时,模型属于具有2~3个组元的GMM,此时认为横向加速度信号分布存在预警和报警的模式分量,并随着k2或k3的增大而逐渐增强。
模型表征概率密度函数时其相应的约束条件为
(2)
2.2 基于EM算法的模型训练过程
GMM中对于未知参数θ(k1,k2,k3,μ1,μ2,μ3,σ1,σ2,σ3)的极大似然函数为

(3)
对于横向加速度信号的分布来说,其单点概率普遍都很小,在做机器运算时极易造成浮点数下溢,因此需对其取对数,将乘积转变为加和,则由式(3)可得

(4)
由式(4)可得θ的估计值为
(5)
根据上式很难直接取得θ的估计值,但若能假定一些没有观测到的潜在数据y为已知,则可以得到1个关于θ的简单后验分布f(θ|x,y),利用f(θ|x,y)的简单特性可进行各种统计计算,这样就将1个复杂的极大化问题转化为了1系列简单的极大化问题(EM算法)[3]。结合文献[4]中的部分结论,对于GMM来说,具体表现为
(6)
(7)
(8)
其中,
k1+k2+k3=1
式中:i为迭代次数;k(θp│xn)为基于贝叶斯理论的后验概率, 且k(θ1|x)+k(θ2|x)+k(θ3|x)=1。
选择合理的初值,利用式(6)—式(8)可求解出θ(k1,k2,k3,μ1,μ2,μ3,σ1,σ2,σ3)的极大似然估计。
2.3 基于贝叶斯聚类的统计模式识别方法
基于贝叶斯聚类的统计模式识别方法是在知道车辆系统相应工况的先验知识的前提下进行车辆系统状态识别的。本文结合中国铁道科学研究院对车辆动力学的多年研究以及大量的现场特定故障试验和数据,研究高速列车各种运行工况下相应系统模型的先验概率分布,而后据此对车辆系统状态的稳定性进行判别。
从统计学的角度分析车辆系统的动力学状态,亦即在一定的约束条件下(特定的部件状态、运行速度、线路条件等),统计模型的模式即对应于车辆的运行状态[5]。假设车辆系统在某时刻下,其横向运动状态可分为3个模式类,即ω1,ω2,ω3,系统状态属于某模式类的概率密度函数分别为P(ω1),P(ω2),P(ω3)。 令X表示由横向加速度信号x构成的N维向量,则X的类条件概率密度函
数为P(X|ωp)。
根据贝叶斯公式,在向量X出现的前提下,高速列车p模式类的后验概率P(ωp|X)为
(9)
按照贝叶斯最小错误概率分类决策,即有
P(ω|X)=maxP(ωp|X)x∈ω
(10)
2.4 识别方法的仿真验证
选取2014年CRH2型动车组某试验车发生蛇形失稳时的构架横向加速度信号并经8~10 Hz滤波后得到的半波有效值作为特征数据,利用Matlab软件对识别方法进行仿真验证。该高速列车的速度与转向架横向加速度有效值的关系如图1所示。
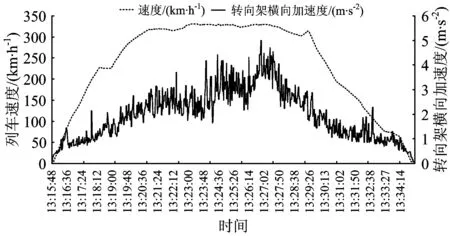
图1高速列车发生蛇形失稳时速度与转向架横向加速度有效值的关系
为了充分反映高速列车当前的运行状态,并更好地拟合概率分布函数,选取其减速前20万点横向加速度信号作为输入,根据式(6)—式(8)进行EM算法迭代,得到的加权系数估计值分别收敛于k1=0.809 3,k2=0.124 4,k3=0.066 3时。
图2为GMM中3个模式的期望、方差与迭代次数的关系,图3为根据先验知识库与式(9)求得的高速列车3个模式下的后验概率。
由图3可见,对该组横向加速度数据用贝叶斯聚类算法识别,属于报警模式的概率最大,再根据贝叶斯最小错误概率分类决策,即认为当前车辆发生了横向失稳现象,从而实现了车辆横向稳定性状态的识别。而在实际应用中,根据不同的车辆结构、悬挂部件参数、轮轨型面磨耗程度及线路条件等方面的数据,对先验知识库进行修正,以适应不断变化的列车系统状态,从而进一步提高系统的准确度,降低系统的误报率。
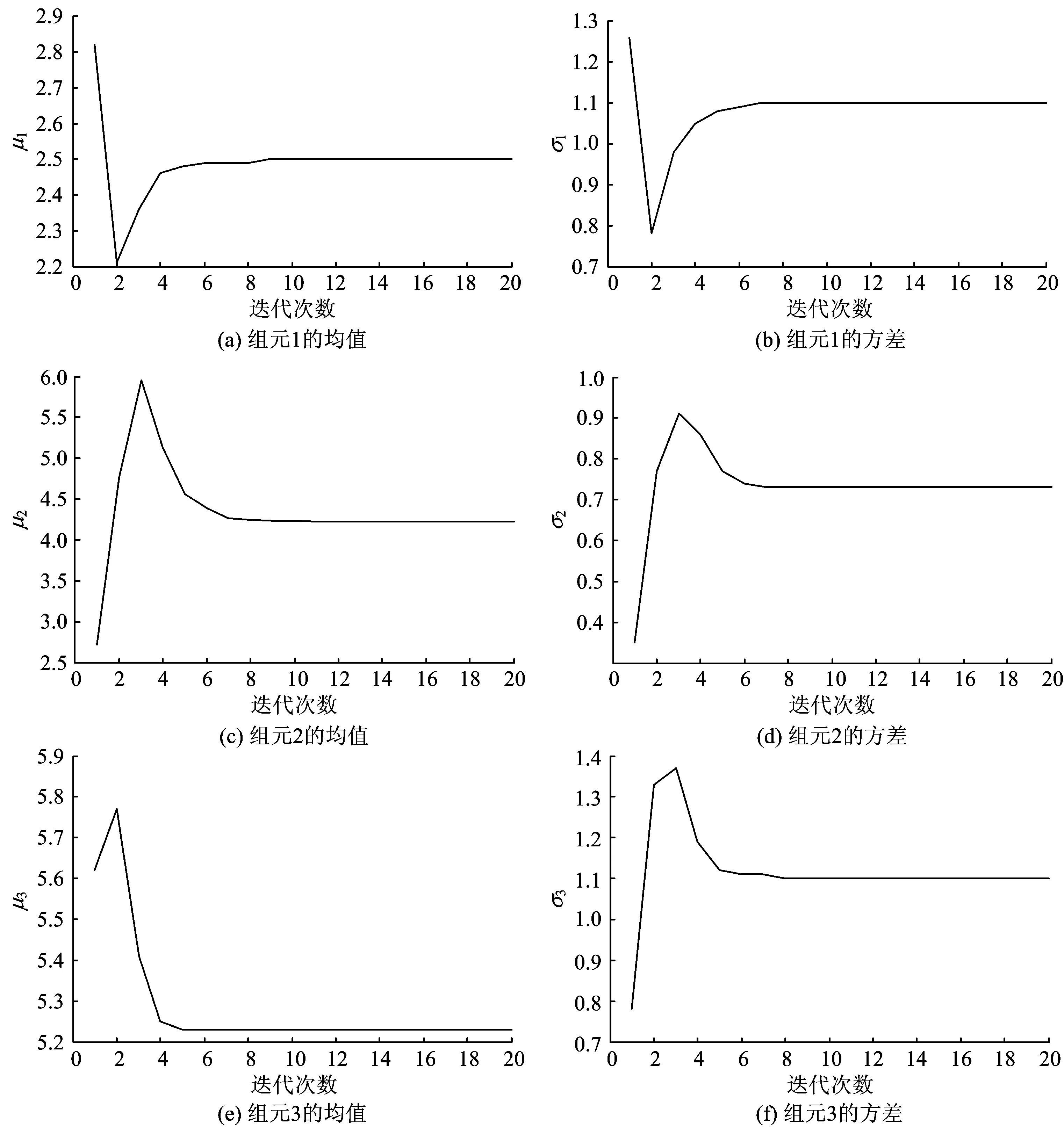
图2 GMM参数与迭代次数的关系
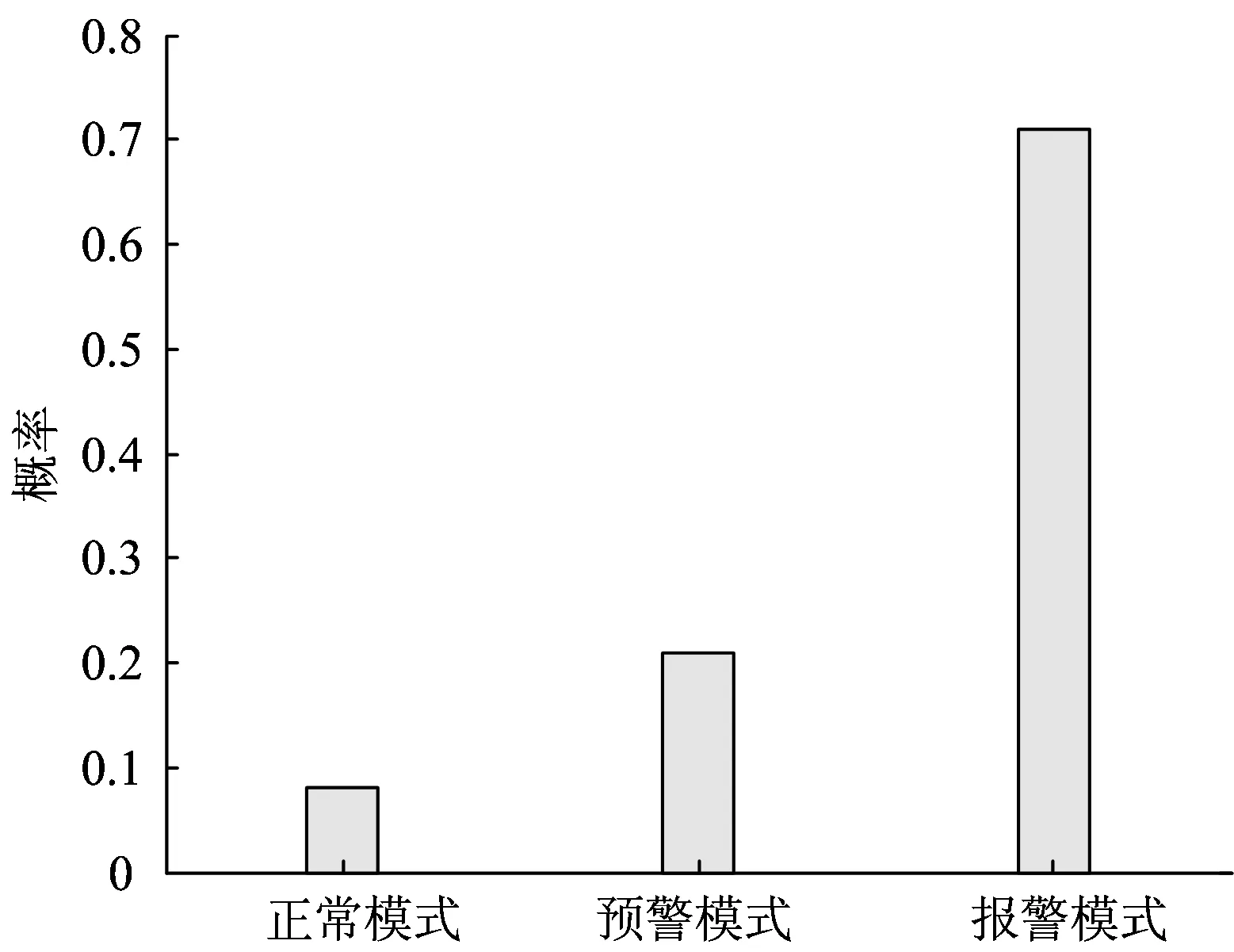
图3 基于贝叶斯公式的后验概率
3 高速列车横向稳定性实时在线监测装置
基于上述识别方法设计了高速列车横向失稳实时在线监测装置,该装置由数据采集与处理模块、综合诊断模块、网络传输模块、车载实时数据库模块4部分组成。高速列车横向失稳实时在线监测装置的工作原理如图4所示,实物如图5所示。
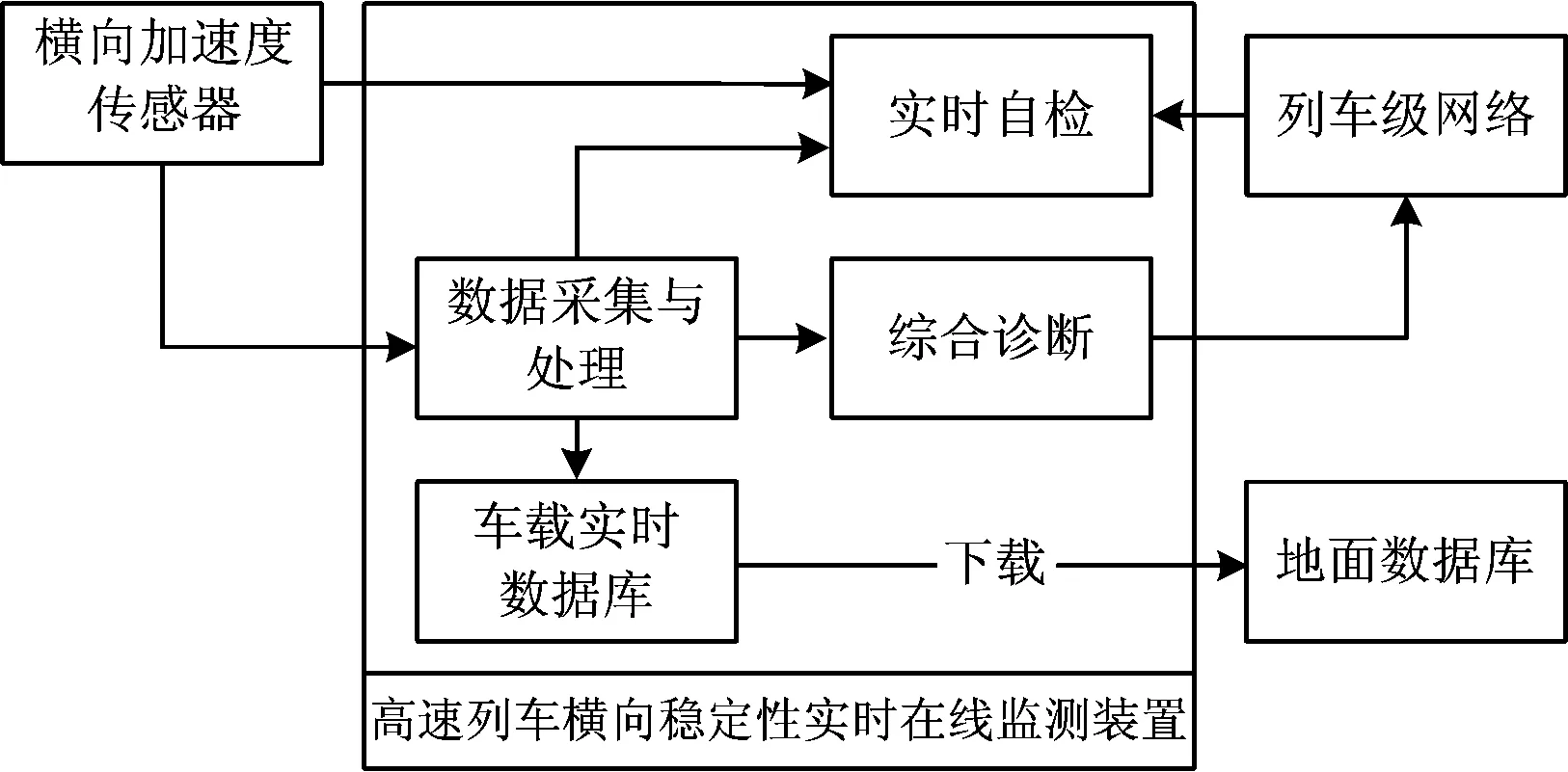
图4 高速列车横向失稳实时在线监测装置工作原理

图5 高速列车横向失稳实时在线监测装置实物图
横向加速度传感器作为整个装置的前端信号源,用来采集列车的横向振动加速度,并将其转换为电信号,将结果上传至数据采集与处理模块。
数据采集与处理模块将横向加速度传感器输出的模拟信号经前置抗混滤波后,转换为数字信号,信号波形经1 024 Hz采样后提供给综合诊断模块。
综合诊断模块将采得的数字信号进行去野值、8~10 Hz滤波等预处理后,以半波信号的有效值为特征样本,计算GMM的参数,并利用贝叶斯聚类算法进行状态识别。综合诊断模块在软件平台上采用实时操作系统QNX,其良好的实时性为综合诊断模块的功能实现提供了强大的支持。通过多功能车辆总线MVB、以太网等列车网络与牵引控制单元CCU、列车自动限速装置等设备实现网络连接,将综合诊断结果传输至列车控制端,并获取列车的基本信息、运行信息及安全信息,用于装置的数据记录与分析。
车载实时数据库模块将高速列车运行过程中的横向加速度信号、预警和报警信息与从列车网络获取的高速列车运行状态相关联,并存储以供综合诊断模块调用和地面下载分析。同时通过与本车失稳检测数据的纵向历史对比,达到降低高速列车运行中失稳误报警的目的。
地面数据库用于对从车载实时数据库获得的数据进行深层次挖掘,建立高速列车运行档案,实现列车数据的汇总、分析,对同列车不同车辆的失稳状态横向对比,分析转向架横向失稳的发展趋势,实现故障部件定位,从而指导高速列车的运用管理及维修。地面数据的分析如图6所示。
为了进一步验证装置在实车运用中的效果,按照GB/T 25119—2010《轨道交通机车车辆电子装置标准》,GB 4208—2008《外壳防护等级》,IEC 61373 Edition 2.0 2010-05《铁路应用 铁道车辆设备冲击和振动》和GB/T 17626.29—2006《电磁兼容试验和测量技术》以及失稳检测装置型式试验大纲的要求,先后对装置进行了多次型式试验和检测,通过了产品质量监督检验。试验结果表明,本文设计的高速列车横向稳定性实时在线监测装置能够根据高速列车不同运行工况及车辆部件状态准确地进行失稳诊断,且车载实时数据库和地面数据库为数据分析提供了良好的支撑,同时也满足了系统的实时性要求与恶劣工况下的耐受性要求,达到了最初的设计目的。
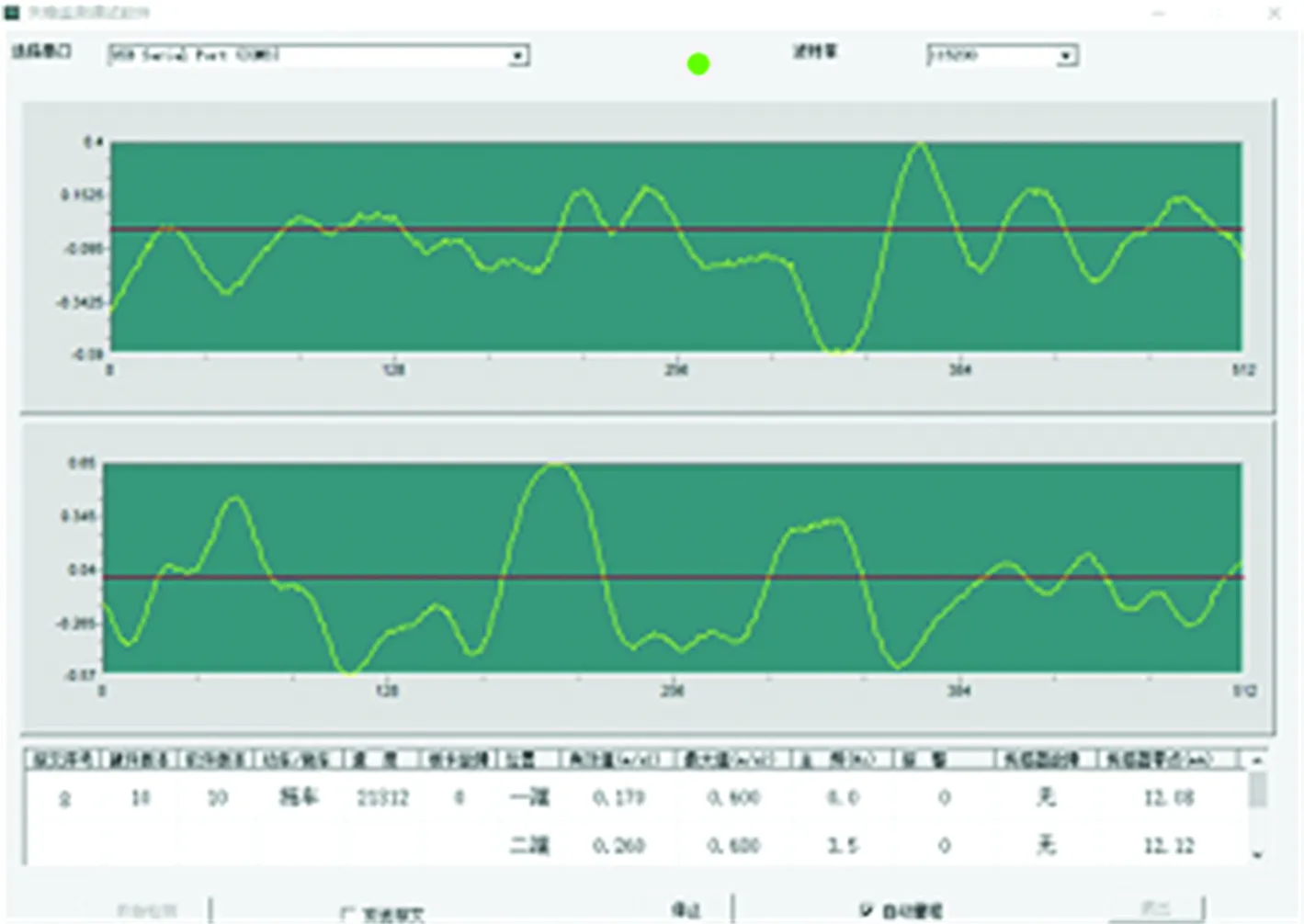
图6 地面数据分析界面
4 结 论
针对高速列车既有失稳检测装置在报警准确性和数据存储等方面的不足,开展了统计模式识别在高速列车横向运动稳定性方面的应用研究,并基于贝叶斯聚类算法设计了高速列车横向失稳实时在线监测装置。在进行系统建模与参数估计时,根据信号的混合高斯特性使用GMM和EM算法,提高了系统拟合度,降低了计算复杂度。基于大量现场试验数据建立的先验知识库有效克服了传统判别方法固化、单一的缺陷,而车载实时数据库与地面数据库的建立为数据分析提供了良好支撑。仿真验证了识别方法的准确性,型式试验验证了装置在现实应用中的可靠性。
[1]孙丽霞. 高速列车横向运动稳定性和动态脱轨理论分析及评价方法研究[D]. 北京:中国铁道科学研究院,2014.
(SUN Lixia. Evaluation Method Study and Theory Analysis of Lateral Running Stability and Dynamic Derailment of High Speed Train [D]. Beijing:China Academy of Railway Sciences, 2014.in Chinese)
[2]刘峰, 延九磊, 董孝卿,等. 转向架横向稳定性的实时在线监测[J]. 铁道机车车辆, 2010,30(2):5-7,64.
(LIU Feng, YAN Jiulei, DONG Xiaoqing, et al. Real Time On-Line Monitor of Bogie Lateral Stability[J]. Railway Locomotive & Car, 2010,30(2):5-7,64. in Chinese)
[3]刘科满, 相敬林, 段晨东,等. 基于EM算法的水下目标辐射噪声模型参数估计[J]. 系统仿真学报, 2009,21(10):2836-2839.
(LIU Keman, XIANG Jinglin, DUAN Chendong,et al. EM-Based Underwater Target Radiated Noise Model Parameters Estimation [J]. Journal of System Simulation, 2009,21(10):2836-2839. in Chinese)
[4]BISHOP C M. Neural Networks for Pattern Recognition [M]. Oxford, UK: Oxford University Press, 1995.
[5]刘峰, 黄强, 王悦明, 等. 运行旅客列车动力学性能研究[J]. 铁道机车车辆, 2003, 23(2):1-3.
(LIU Feng, HUANG Qiang, WANG Yueming, et al. Study on the Dynamic Properties of the Passenger Car [J]. Railway Locomotive & Car, 2003, 23(2) :1-3. in Chinese)