基于实体模型索引的海量激光点云分块存储研究与应用
2016-04-09李长辉
宋 杨,李长辉,宋 爽
(1.广州市城市规划勘测设计研究院,广东 广州 510060;2.武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079)
基于实体模型索引的海量激光点云分块存储研究与应用
宋杨1,李长辉1,宋爽2
(1.广州市城市规划勘测设计研究院,广东 广州 510060;2.武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079)
摘要:三维激光扫描技术的日益进步推动了点云数据量级的不断攀升,给海量点云的高效管理及优化处理带来新的挑战。文中针对在大范围点云场景中快速调度局部详细点云的实际应用需求,借鉴空间格网结构的数据组织思路,优化并提出可变长度的海量点云分层分条带存储的工作机制,结合数据库管理,实现了基于实体模型索引的激光点云及三维模型的快速调度及联动显示。基于研发的点云专家科研系统实践,推动了海量点云数据集约化管理水平,具有一定的科研及实用价值。
关键词:点云;分层分块;实体模型;快速调度;空间格网
三维激光扫描技术是一种新兴的数据采集技术,起源于20世纪80年代,经过近10年飞速发展已经在电力、公路、地形图测绘、古建筑保护、工业制造等广泛的行业领域都得到应用。随着三维激光扫描技术的日臻成熟,其有效扫描距离、精度和分辨率的不断提高,所获取的三维激光点云数据量也极具增大。如何高效存储、管理、显示及分析海量点云数据,对其进行特征提取、场景分割、模式识别及三维重构存在诸多技术瓶颈有待突破。
索引机制的建立可实现将空间散乱分布的海量点云数据进行结构化的管理,也是点云数据优化处理中的有效措施,目前流行的点云索引方式包括八叉树结构、 空间格网结构;存储方法包括基于外存文件、数据库、以及云存储等模式。本文针对古建筑三维激光扫描测量形成的海量点云数据的集约化管理及快速调度的应用需求,借鉴并优化空间格网结构的思路,建立了海量激光点云分层、变长分块存储工作机制,结合数据库的索引表,实现了对目标对象三维激光点云及三维模型的快速调度及联动显示。
1海量激光点云分层分块存储机制
1.1八叉树结构及空间格网结构
目前,代表性的点云数据索引方式八叉树结构和空间格网结构的适用性包括:
1)八叉树结构:适合大型场景的漫游、多分辨率模型LOD动态调度;适合点云大场景漫游、宏观展示。八叉树索引通常只保留数据地址而数据本身仍是混杂的,非结构化的,因此在数据读取过程中文件指针需不停地跳转,对于海量点云数据,磁盘跳转寻道的时间开销将大大降低数据访问的效率。
2)空间格网结构:适合点云小场景的显示和快速加载,与数据本身无序的八叉树结构相比,空间格网结构对网格化划分的过程中完成了数据的结构化整理,更利于点云数据库扩充或多时相点云数据的叠加。
1.2基于点云分层分块的索引存储
对于从大范围场景的点云数据中提取、显示其中某一局部区域点云,为满足细部点云查看形象性及准确性要求,要求点云分块需具备较小的粒度。常规的空间格网结构存储机制将点云规则大小分块,并直接将分块点云存储在一个个文件中,势必产生大量分散的分块文件,极大降低了点云数据索引的效率。以一组文件大小为116 G的点云实验,其数据空间体积约为65 370 m3,如按1 m×1 m×1 m的空间格网分块,将产生65 000余个分块文件,每个文件大小介于1~2 048 MB之间。由于分块文件数量巨大,尤其当涉及多个分块文件需要同时读取时,磁头跳转到MFT主文件表再跳转回对应分块文件所产生的时间开销将是不容忽视的。
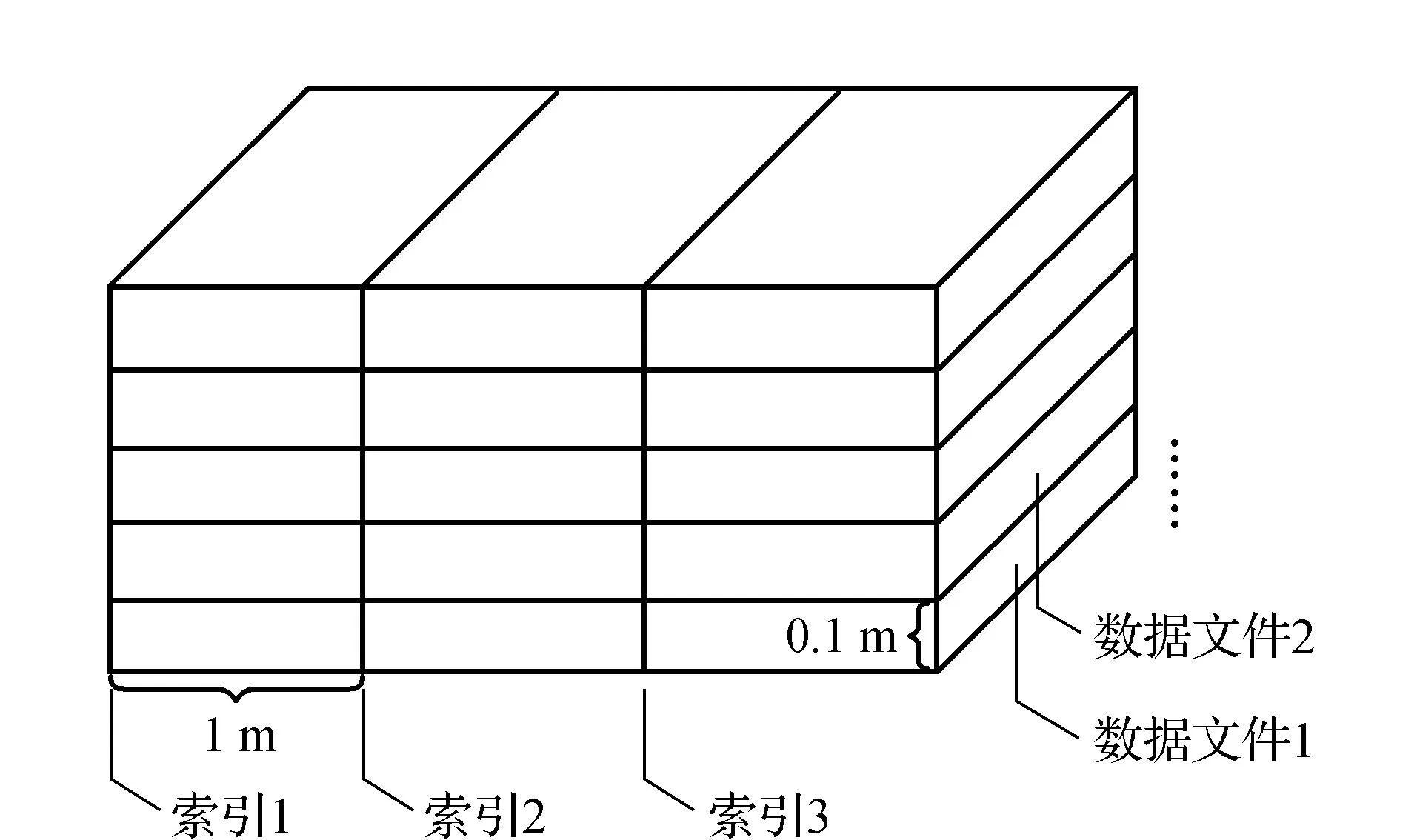
图1 点云块分割
为避免基于大量分块文件进行点云数据索引而产生的性能损失,本文研究提出:对点云数据整体首先按点云数据的高程信息进行分层,并将分层结果存储于不同文件,每个分层文件内部再按条带划分。如图1所示,对一个点云区域按照如0.1 m的高程间隔、1 m的北方向间隔分割为点云条块,将每一个点云条块存储为一个二进制文件,并将其条块索引写入SQL数据库。
如图2所示,每个分层文件内部的点云空间划分为宽高一定的立方条带,一般选择点云覆盖区域的短边作为条带方向的,以避免条带内包含过多数据分块。当点云区域范围较大时,也可采用整体分块的方法,对现有点云条带按其垂直方向拆分如图2所示的虚线分割区域A和B,是否分割与分割数量的多少与点云区域宽度、点云密度、机器性能均有关,可根据实际情况调节,实现由整体到局部,分层分块的点云存储机制。
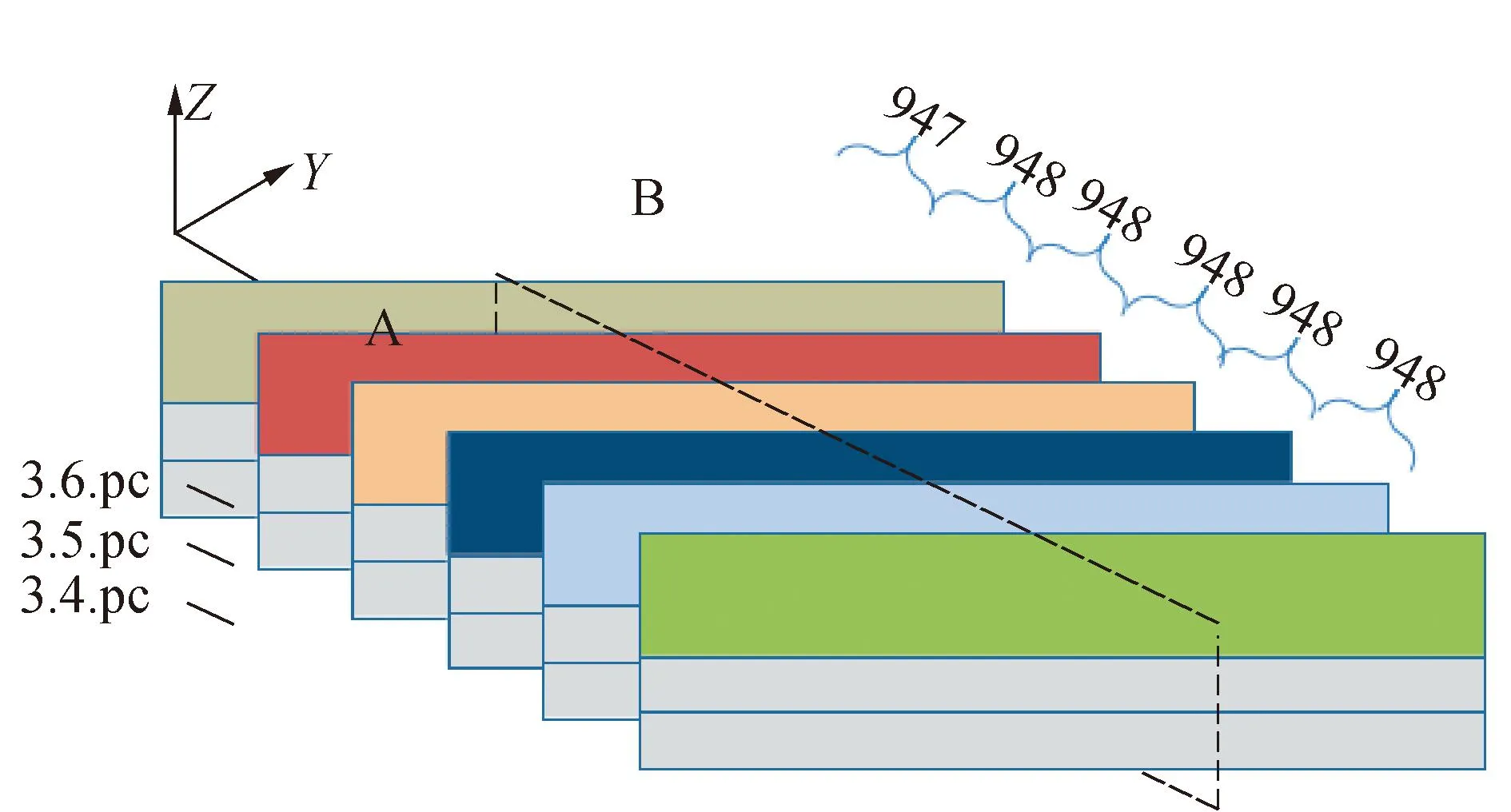
图2 分层分块的点云存储机制
本文算法选择按“条带”存储的而不采用传统的规则单元网格存储的一个重要原因在于,“条带”相当于可变分块,更有利于多时相点云数据的叠加与查询。如图3所示,黄色部分为部分更新的点云数据,条带存储优势在于可灵活的切割和组合多时相的数据,一定程度上减小了数据融合产生的空隙,这也是八叉树结构存储方式所无法比拟的。

图3 多时相点云数据融合
经过条块处理后的点云分块,利用两个表存储其索引信息,以实现数据库有序管理,需要存储于数据表内的信息包括时相库信息与分块信息,如表1、表2所示。
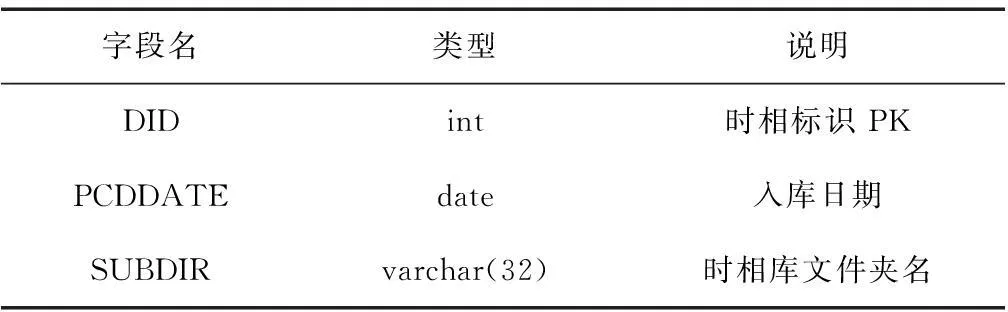
表1 PCDDATE表结构

表2 PCDINDEX表结构
2基于实体模型索引的点云调度
基于海量激光点云分层分块存储机制以及索引信息的表格化管理,已实现点云数据库的构建。应用程序直接向点云数据库管理系统发送包含坐标范围、时相标记和最大点云上限信息的请求并接受经过抽稀处理的点云显示在窗口中,以完成面向实体对象的点云数据的快速读取及调度,具体调度过程如图4所示。

图4 点云数据库管理系统工作示意图
点云数据库管理系统接收到应用程序请求的坐标范围与允许最大点云数量,以坐标范围和勾选的时相库为查询条件从索引数据库中提取分块信息,经过时相分块融合、调整,从分块指向的数据块地址从点云数据库中提取坐标数据。在此过程中,应用动态抽稀技术,即在读取过程中判断数据大小,压缩已读入的数据并根据新的抽稀级别继续读取。最后,点云数据库管理系统负责将抽稀后的坐标数组与实际使用的抽稀级别返回给调用程序。
以三维激光扫描技术应用于古建筑园林数字保护领域为例,原始扫描的点云是最重要的数字记忆档案成果,除此之外其它成果形式还包括如图5所示的基于点云测制的古建筑现状测绘图,以及图6所示的在古建筑现状测绘图上进一步制作的具有可量测精度的三维实体模型。与一般三维仿真模型不同,图5所示的古建筑三维模型与其对应的三维激光扫描点云配准于同一坐标系下,并且模型经过了粒度细化处理,模型的每个部件为一个独立对象Object,有助于分部件的数据调度分析以及古建筑结构的拆分模拟、查看。

图5 古建筑现状测绘图

图6 实体模型
本文研究基于Qt及OpenGL开发“古建筑园林三维激光专家科研系统”,在模型视图中用户可以选择一组模型部件,根据选择部件的包围盒的坐标,在表1 PCDINDEX块索引数据表中检索到对应点云所在的点文件,根据表中记录的起始偏移量OFFSET快速找到点云,并在点云视图中加载显示,如图7所示。
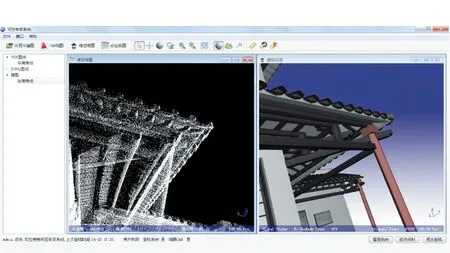
图7 基于实体模型索引快速调度点云
3实验与结论
本文研究基于上述海量激光点云分块存储及实体模型索引,自主研发了“古建筑园林三维激光专家科研系统”,实现海量点云数据的有序管理与快速调度。系统在Qt 4.8.4(MinGW)编译环境下结合OpenGL研发实现,主要硬件配置条件为Intel Core2 P8600 2.40 GHz CPU,4 G内存,500 GB机械硬盘,Nvidia Quadro NVS 160 M显卡。
实验点云数据由奥地利RIEGL VZ-400长距离脉冲式激光扫描仪采集,扫描对象为广东清代四大名园之一的东莞市可园博物馆古建筑群。扫描面积约2 200 m2,扫描设站738个,利用GDCORS-RTK布设控制点11个、测量站心点135个和特征点216个。入库点云总点数为52亿,总容量为116 G。
随机选择了10组基于实体模型的点云数据样本,进行快速调度的效率测试,测试结果如表3所示。
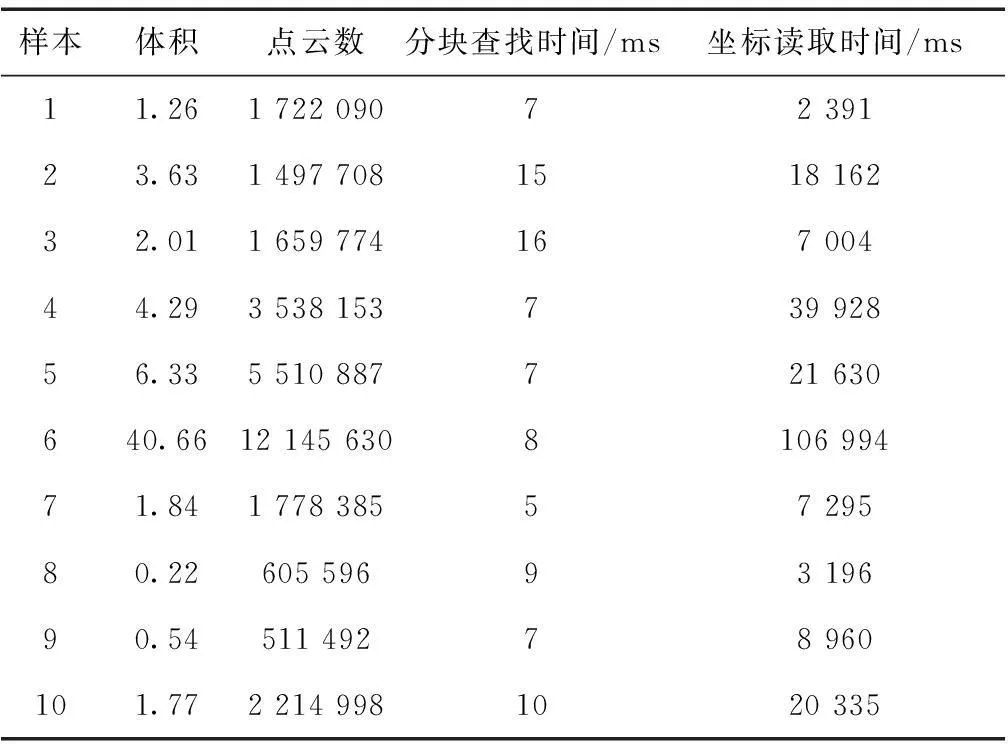
表3 点云调度效率测试结果
根据表3测试结果,本文提出的基于实体模型索引的海量激光点云分块存储工作机制在所研发的“古建筑园林三维激光专家科研系统”的点云调度中具有良好表现,其简洁的数据结构有助于点云调度时省去了构建复杂搜索树的过程,尤其对于小范围、高密度的点云调度任务表现极佳。
三维激光扫描技术的日益进步带动了点云数据量级的不断攀升,也给点云数据管理及优化处理不断带来新的挑战。本文研究提出了针对海量激光点云数据的分层存储与块索引的数据库管理方法,基于研发的点云专家科研系统的实践,推动了古建筑园林海量点云数据集约化管理水平,具有一定的科研及实用价值。
参考文献:
[1]张毅,闫利.地面激光点云强度噪声的三维扩散滤波方法[J].测绘学报,2013,42(4):568-580.
[2]王晏民,郭明.大规模点云数据的二维与三维混合索引方法[J].测绘学报,2012,41(4):605-612.
[3]龚俊,柯胜男,朱庆,等.一种八叉树和三维R树集成的激光点云数据管理方法[J].测绘学报,2012,41(4):597-604.
[4]龚俊,朱庆,张叶廷,等.顾及多细节层次的三维树索引扩展方法[J].测绘学报,2011,40(2):249-255.
[5]吴静,靳奉祥,王健.基于三维激光扫描数据的建筑物三维建模[J].测绘工程,2007,16(10):57-60.
[6]刘旭春,丁延辉.三维激光扫描技术在古建筑保护中的应用[J].测绘工程,2006,15(1):48-49.
[7]张芯,李广云,王力,等.基于HDFS的海量激光点云数据分块存储方法研究[J].测绘通报,2014(3):21-24.
[8]曹启华,邓雪清.基于金字塔模型的规则格网数据可视化交互编辑[J].测绘科学技术学报,2007,24(6):427-431.
[9]张巧英,陈浩,朱爽.密度聚类算法在连续分布点云去噪中的应用[J].地理空间信息,2011,9(6):101-104.
[10] 曹彤,刘臻.用于建立三维的八叉树编码压缩算法[J].中国图象图形学报,2002,7(1):50-54.
[11] 路明月,何永健.三维海量点云数据的组织与索引方法[J].地球信息科学,2008,10(2):190-194.
[12] 谢洪,吴博义,赵展.一种新的海量点云数据管理方法研究[J].遥感信息,2013,28(6):26-32.
[责任编辑:刘文霞]
On the big data laser point cloud block storage based on object model index
SONG Yang1,LI Changhui1,SONG Shuang2
(1.Guangzhou Urban Planning Design and Survey Research Institute,Guangzhou 510060,China;2.State Key Laboratory of Information Engineering in Surveying,Mapping and Remote Sensing,Wuhan University,Wuhan 430079,China)
Abstract:Three-dimensional laser scanning technology has become more progressive,bringing new challenges to efficiently handle massive point cloud.In this paper,how to quickly dispatch point cloud from the big scene,by referencing the idea of space grid structure,it proposes a massive point cloud stratification variable length,slitting tape storage mechanism,achieving a rapid scheduling model based on entity indexes laser point clouds and three-dimensional model.
Key words:point cloud;layered;object model;quick dispatch;space grid
中图分类号:TP391.41
文献标识码:A
文章编号:1006-7949(2016)04-0007-04
作者简介:宋杨(1979-),女,高级工程师,注册测绘师,博士.
基金项目:广州市测绘与地理信息重点工程技术研究开发中心(11G0041)
收稿日期:2015-03-13;修回日期:2015-04-21