基于遗传算法和CMAC的双电机协调控制
2016-04-08曹训训李凌杰武汉船用电力推进装置研究所武汉430064
曹训训,李凌杰(武汉船用电力推进装置研究所,武汉 430064)
基于遗传算法和CMAC的双电机协调控制
曹训训,李凌杰
(武汉船用电力推进装置研究所,武汉 430064)
摘要:提出一种小脑模型神经网络(CMAC)和自适应在线遗传算法(GA)相结合的新型控制算法,应用于机器人中两轴永磁无刷直流电机的速度协调控制,利用MATLAB/SIMULINK仿真,结果证明了GA和CMAC复合控制器可以有效的消除协调控制中的转矩脉动。
关键词:小脑模型神经网络遗传算法协调控制
0 引言
永磁无刷直流电机具有良好的静、动态调速性能,且结构简单、运行可靠、易于控制,近年来广泛应用于移动机器人中。当机器人多轴协调控制系统中的两个电机主、辅电机需要同步运行时,由于电机参数的变化和负载大小的不同,两电机转速的协调会受到干扰。此时,可采用遗传算法、粒子群优化、神经网络以及模糊控制等方法来取代或优化传统的PID调速,使辅电机严格按照主电机的转速来调整PWM触发电压的大小,从而实现协调同步。
其中,遗传算法作为一种高级启发式搜索的优化方法,简单通用、鲁棒性强,无需任何初始信息就可寻求全局最优解。但遗传算法局部搜索能力较弱,收敛速度慢,影响系统的高精度控制和稳定运行[1]。小脑模型神经网络算法,是一种模拟人脑的学习,即模拟种群中单个个体的自学习算法,具有很强的局部泛化能力,收敛速度快,且其最小值是唯一的,迭代次数少,程序执行速度快,适合于实时控制[2]。但小脑模型神经网络在控制的初始阶段需要调节好PID参数,以启动系统。将这两种算法相结合,取长补短,为协调控制提供了一种新的更佳的解决方案。
1 永磁无刷直流电机的数学模型
永磁无刷直流电动机的气隙磁场波形、反电动势波形以及定子电流波形都是非正弦的,这为建模带来了一定的困难。为了简化数学模型,现对该电动机的工作情况作如下假设:
1) 电动机本体的三相定子绕组是完全对称的,相应的电气时间常数可以忽略不计。2) 忽略定子电流磁通以及齿槽效应和磁路饱和对气隙磁通的影响。3) 电机运行时,忽略温度等外界因素对电机参数的干扰。在满足上述假设条件的基础上,永磁无刷直流电机动态特性方程组描述如下:
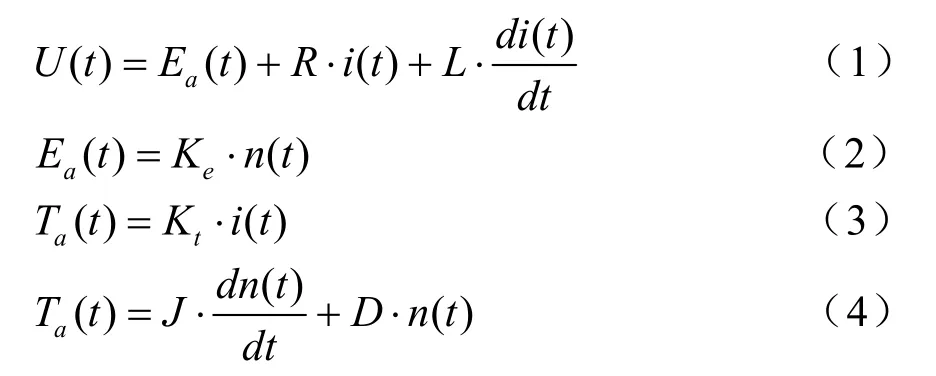
其中,U-触发电压,Ea-感应电动势,R-三相定子电阻,L-电枢电感,i-相电流,Ke-反电势常数,Kt-转矩系数,n-电机转速,Ta-电磁转矩,J-电机惯性系数,D-摩擦系数。
在电机动态运行时,对式(1)~(4)进行拉普拉斯变换,可得拉式方程组,即,
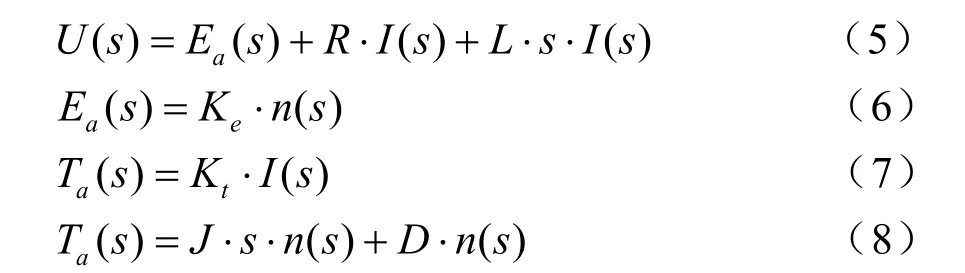
在机器人两轴协调控制系统中,辅电机的参数为:Ke=0.125 v·s/rad,Kt=15 Nm/A,L=5×10-3H,D=0.01 Nm·s/rad,J=0.03kg·m2,R=5Ω。由式(5)~(8)求得辅电机转速调节器的传递函数为:

在计算机控制系统中采用离散控制,Z变换后,传递函数为,

2 遗传算法PID参数寻优
遗传算法是模拟达尔文生物进化论的自然选择和遗传学机理的生物进化过程的计算模型,是一种通过模拟自然进化过程搜索最优解的方法,它最初由美国Michigan大学J.Holland教授于1975年首先提出来的,J.Holland教授所提出的GA通常为简单遗传算法。
本文采用自适应遗传算法在线整定PD参数,在采样时刻k,选取足够多的个体,计算不同个体的自适应度,通过优化,选择自适应度大的个体所对应的PD参数作为该采样时刻下的控制参数。为使协调控制过程平稳,防止产生超调,采用误差绝对值及误差变化率的加权和作为采样时刻k中个体i的最小目标函数[3]。参数选择的最小目标函数为:

式中,error(i)为采样时刻k个体i的速度跟踪误差,∆e(i)为采样时刻k个体i的跟踪误差变化率,θ1、θ2为经验系数。
采用惩罚功能避免超调,即将超调量作为最优指标的一项,此时最优指标为:

自适应度越大,变异概率越小,自适应变异概率取为:

其中,pop为种群的个体数。
遗传算法优化PD参数的步骤如下:
1) 确定PD参数的大致范围,并对其进行编码;2) 随机生成个体数为n的种群,初始化适应度值;3) 将种群中的个体解码成对应的参数值,用此参数求代价函数值J及适应函数值f,取f=1/J ;4) 进行复制、交叉和变异操作,产生下一代种群;5) 若参数收敛或达到预定的指标,输出最优值,否则,返回步骤(3)和(4)。
3 基于遗传算法的CMAC控制器
3.1 CMAC前馈控制系统
小脑模型神经网络是一种表达复杂非线性函数的表格查询型自适应神经网络,该网络可通过学习算法改变表格的内容,具有信息分类存储的能力。CMAC比一般神经网络具有更好的非线性逼近能力,更适合于复杂动态环境下的非线性实时控制[4]。CMAC前馈控制的网络拓扑结构如图1所示。
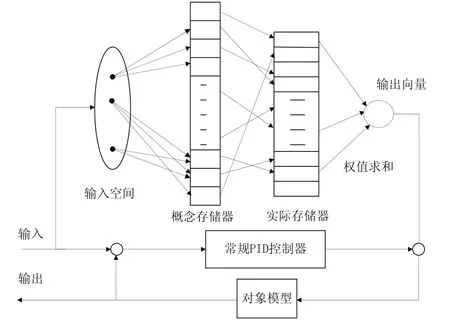
图1 CMAC网络拓扑结构
图1所示CMAC和PID并行控制系统中,CMAC控制器起前馈作用。CMAC前馈控制的基本思想在于:将输入值在概念存储器中进行映射,从实际存储单元中找到对应于该映射状态的地址,将这些存储单元中的网络权值求和得到CMAC的输出;将此实际输出值与总输出值进行比较,并根据梯度下降法修改这些被激活的存储单元的权值。
3.2 遗传算法取代常规PID控制器
在机器人双电机协调控制系统中,改进传统的CMAC前馈控制器,将传统的PID控制器替换为遗传算法控制器,采用遗传算法和CMAC复合控制。改进后的双电机智能协调控制系统框图如图2所示。
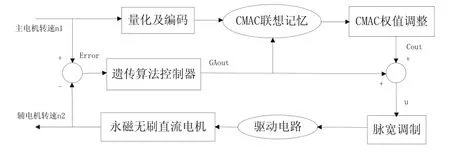
图2 双申机智能协调控制系统框图
其中,CMAC控制器的一维输出Cout(k)为:

式中,δi为二进制算子,ωi为CMAC网络权值,f为CMAC网络的泛化参数。
将图2中主电机的转速信号n1(k)作为CMAC的输入值Uj。将U在区间[Umin,Umax]上分成(L+2f)个量化间隔:
其中,∆u为泛化常量,比量化间隔稍大,通常取为:

在泛化区间内,CMAC的网络权值才有效,故二进制算子δi为:

基于遗传算法的CMAC复合控制器的总输出为GA控制器和CMAC控制器的输出之和,即:

其中,GAout(k)为遗传控制器的输出。
每一控制周期结束时,CMAC的输出Cout(k)与总控制器输出u(k)相比较,修正权值,进入学习过程。CMAC网络权值的调整指标为:

将式(14)和式(20)代入式(21)得CMAC网络权值的修正量:

其中,η∈(0,1)为网络学习速率。
为了避免训练过程发生振荡,加快收敛速度,考虑k时刻以前的梯度方向,引入动量项,权值修正公式为:

式中,α∈(0,1)为动量项惯性系数。当系统开始运行时,置ω=0,此时Cout(k)=0,u(k)= Cout(k),系统由遗传算法控制器进行全局搜索,寻找最优PD参数。随着CMAC的学习,遗传算法PD控制器产生的输出控制量GAout(k)逐渐为零,CMAC的网络权值趋向稳定,CMAC产生的输出控制量Cout(k)逐渐逼近控制器总输出u(k)。u(k)即为辅电机的脉宽调制电压,它通过驱动电路实时改变辅电机的转速,使其精确地与主电机同步。
4 仿真分析
4.1 仿真实验
为了比较基于遗传算法的小脑模型控制器的控制效果,在MATLAB/SIMULINK软件环境中进行了仿真研究,并与遗传算法PID控制和小脑模型PID控制分别在同样的参数设置和运行环境中进行了速度协调控制性能的比较。GA+CMAC、GA、CMAC+PID三种算法在双电机协调控制系统中的仿真模型如图3所示。
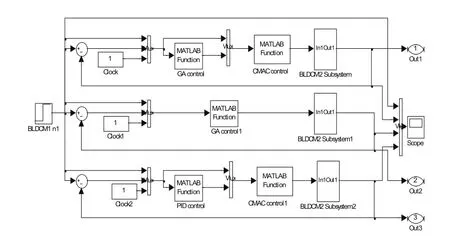
图3 三种算法同环境运行的仿真模型
利用S函数实现算法的离散控制器的设计。误差的初始化是通过时钟功能实现的,从而在S函数中实现了误差的积分和微分。仿真时间为1 s,采样时间为0.001 s,阶跃信号rin(k)=1750 r/min为主电机的转速信号,yout(k)为辅电机的转速跟踪信号。
在遗传算法程序中,取θ1=0.95,θ2=0.05;使用的个体数为pop=120,进化代数为10代,交叉概率为Pc=0.9,采用实数编码方式。为了避免参数选取范围过大,先按经验选取一组Kp、Kd参数,然后在这组参数的周围利用遗传算法进行设计,从而减少初始寻优的盲目性,节省计算量。取参数Kp的取值范围为[20,25],Kd的取值范围为[0.001,0.02]。小脑模型神经网络程序中参数为:L=100,f=5,α=0.04,η=0.1。CMAC和PID并行控制器中的PID参数分别为:Kp=23, Ki=0,Kd=5,即采用PD控制。
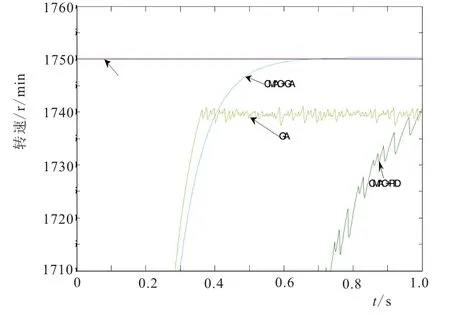
图4 三种算法中双申机的协调控制转速波形
4.2 三种算法控制效果比较
仿真实验中GA和GA+CMAC两种控制方案中的参数均已调节到最优。辅电机转速跟踪主电机的响应曲线如图4所示。由图4可知,采用传统PID和小脑模型神经网络复合控制时,在没有找到最优PID参数的情况下,辅电机产生较大转矩脉动,且调节时间很长,无法与主电机实时协调。单独采用遗传算法控制器时,辅电机转速虽能在较短的时间内与主电机协调同步,但与遗传算法和小脑模型复合控制器相比,辅电机会产生转矩脉动,即图中GA控制器的波形上下抖动,很难收敛到极值点。这在实际应用中是无法实现高精度协调控制的。只有采用遗传算法和小脑模型复合控制时,辅电机不仅能快速高精度地跟踪主电机指令,而且转矩非常平滑,没有脉动,在实际应用中具有重要的意义。
5 结论
遗传算法单独控制时,增益Kp的值在很大程度上决定着控制效果,而引入CMAC复合控制时,电机转速不依赖于Kp的值,Kp的值只需在一个合理的范围内即可,系统的鲁棒性得到改善,且CMAC的局部泛化能力很好的解决了转矩脉动问题,提高了控制精度。
在双电机协调控制中,结合遗传算法全局搜索性能好和小脑模型神经网络局部泛化能力强的优点,模拟种群个体之间及种群中最优个体自身的学习,实现PID最优参数的全局搜索,同时又加快了局部收敛速度,减少了电机的转矩脉动,提高了协调控制的精度,且不需要繁琐的调试PID参数。
参考文献:
[1] Shiu Yin Yuen,Chi Kin Chow.A genetic algorithm that adaptively mutates and never revisits[J].IEEE transactions on evolutionary computation,2009,13(2):454-472.
[2] W.Thomas Miller,Felson H.Glanz,L.Gordon Kraft.CMAC:An associative neural network alternative to backpropagation[J].Proceedings of the IEEE,1990,78,(10):1561-1567.
[3] 刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004:193-238.
[4] 韩力群.人工神经网络理论、设计及应用[M].北京:化学工业出版社,2007:154-163.
Coordinating Control Based on Hybrid Genetic Algorithm and CMAC For Double Motors
Cao Xunxun,Li Lingjie
(Wuhan Institute of Marine Electric Propulsion,Wuhan 430064,China )
Abstract:A new kind of control method combined hybrid cerebellar model articulation controller (CMAC)with online adaptive genetic algorithm (GA) control method is proposed.It is used to control two brushless DC motors applied in a robot.Experimental results in MATLAB/SIMULINK software show that the torque ripple of the coordinate control is eliminated by using the hybrid CMAC and genetic algorithm.
Keywords:CMAC;genetic algorithm;coordinated control
作者简介:曹训训(1983-),男,工程师。研究方向:神经网络控制、预测控制。
收稿日期:2015-09-09
中图分类号:TM331
文献标识码:A
文章编号:1003-4862(2015)11-0049-04
