针对多个地球静止轨道目标的巡游轨道设计
2016-04-08郑乐天徐艳丽朱冬骏
郑乐天,徐艳丽,朱冬骏
(装备学院,北京101416)
针对多个地球静止轨道目标的巡游轨道设计
郑乐天,徐艳丽,朱冬骏
(装备学院,北京101416)
运行在螺旋巡游轨道上的航天器无需施加控制力就可以长期巡游在指定轨道附近,利用该特点,克服地基目标监视系统的不足,可提高空间目标监视能力.在现有的设计基础之上,改进对地球静止轨道多个目标螺旋巡游轨道的初始轨道设计;通过施加控制提出两种可以对地球静止轨道上多个目标进行绕飞观测的螺旋巡游轨道设计;通过仿真验证,对比二者各自的优势.
地球静止轨道;巡游轨道;相对运动;多目标
0 引言
地球静止轨道卫星特殊的轨道性质和优越的空间位置优势,使其在实现国家空间任务中具有重要作用,成为了世界各国竞相发展的重点[1].目前,由于地域限制和探测距离等原因,利用地基探测网很难获得对特定轨道上及附近航天器和空间环境的高精度探测[2-3].利用天基系统提高我国空间目标监视能力成为我国未来太空战略发展的必然要求.部署在地球静止轨道附近的巡游航天器可以螺旋巡游的方式对静止轨道上的多个目标进行探测[4-5],在现阶段具有十分重要的应用前景.
静止轨道卫星具有位置保持功能[6],能够使卫星定位于定点位置,并靠南北位置保持来维持倾角在小范围内变化.本文针对此特点,在单目标巡游轨道设计的基础上,进一步提出了两种针对静止轨道的多目标螺旋巡游轨道,给出了轨道设计和控制方法,并从观测时间、观测角度、轨道消耗能量等方面对两种轨道进行了分析比较.设计结果可为高轨空间目标监视轨道设计提供可行的备选方案.
1 单目标巡游轨道设计
为研究巡游航天器与静止轨道上参考航天器的相对运动,构建轨道坐标系s-xyz(如图1所示),即坐标原点s位于静止轨道上某个特定参考航天器的质心,x轴与参考航天器地心矢径重合;y轴在参考航天器轨道面内与x轴垂直,沿运动方向为正;z轴垂直于轨道平面,与x,y构成右手坐标系[7].
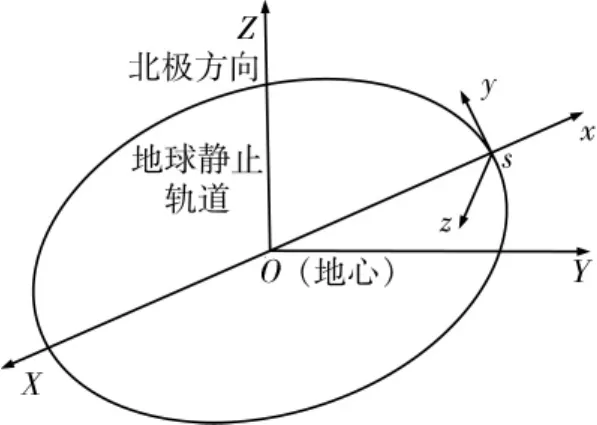
图1 参考轨道坐标系Fig.1 Reference coordinates system
利用STK仿真软件对巡游航天器和参考航天器在Twobody模型和HPOP模型下进行短时间轨道外推,计算二者的相对运动距离,如图2所示.

图2 相对运动距离变化Fig.2 The distance of relative motion
由图2可以看出,在短时间内两种模型的误差较小,为了简便分析,在Twobody模型下两个航天器之间的相对运动可近似由如下方程进行表示[8]:
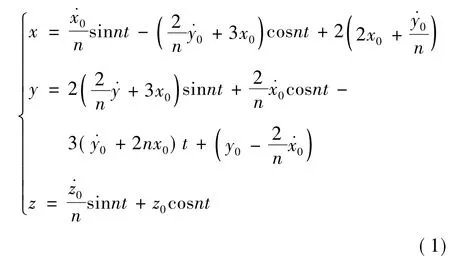
式中,x0、y0、z0分别为初始时刻巡游航天器在参考轨道坐标系下的位置矢量分量分别为初始时刻巡游航天器在参考轨道坐标系下的速度矢量分量,n为参考航天器在轨道上运动的平均角速度n=,其中μ为地球引力常数,a为参考航天器半长轴.
由式(1)可以看出巡游航天器在参考航天器轨道平面内的运动在x方向和y方向是相互耦合的,在z方向做往复性周期运动.通过变换可得
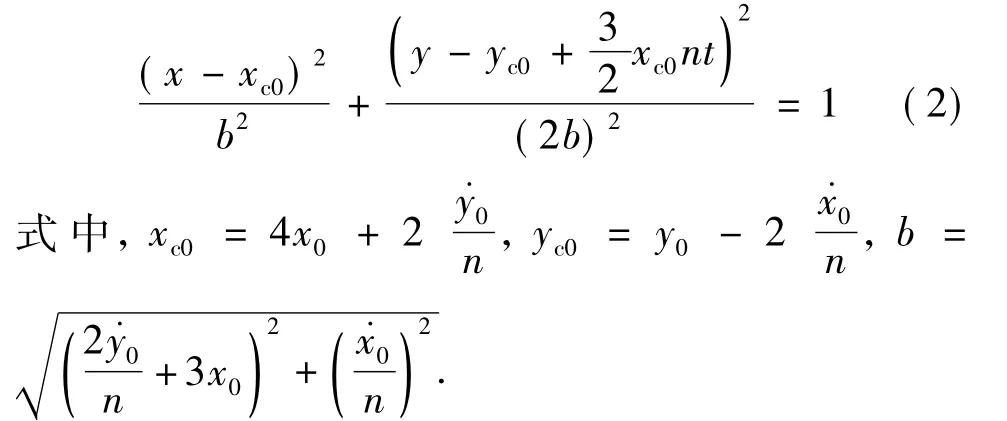
螺旋巡游轨道在参考轨道坐标系下仿真如图3所示.
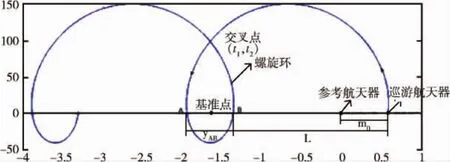
图3 单目标巡游轨道Fig.3 Tourist orbit of one target
定义螺旋环为巡游航天器两次经过交叉点所走过的路径.巡游航天器与参考航天器初始相对位置x0=z0=0,若要实现对参考航天器的360°观测,则需要将参考航天器放在螺旋环中心,即基准点位置.设初始轨道设计时螺旋环中心与参考航天器的迹向距离差为l,则

式中,L为巡游航天航天器一个周期的迹向距离,yAB为螺旋环在迹向的最大距离,m0为初始时刻巡游航天器与参考航天器之间的迹向距离.
由方程(1)前两式可得

式中,tp为运动初始时刻.
由相对运动构型可知,螺旋环在沿迹向上的最大距离即为绕飞轨道与基准轨道相交的两个点之间的距离.令式(1)中第一式等于0可得

由A,B对应的时刻可以得出两点沿迹向的距离
参考航天器实际位置与轨道设计基准点有一个相位差角ρ,且ρ=×180°.若参考航天器原轨道根数为(a,e,i,ω,Ω,θ),则在设计初始绕飞轨迹时所使用的实际轨道根数为(a,e,i,ω,Ω,θ+ρ),即将参考航天器放在了基准点位置,这样可使得巡游航天器可以在一个周期内对参考航天器进行全方位地观测.其中,a为半长轴,e为偏心率,i为轨道倾角,ω为近地点幅角,Ω为升交点赤经,θ为真近地点角.
改进之后,在参考轨道坐标系下进行仿真如图4所示.
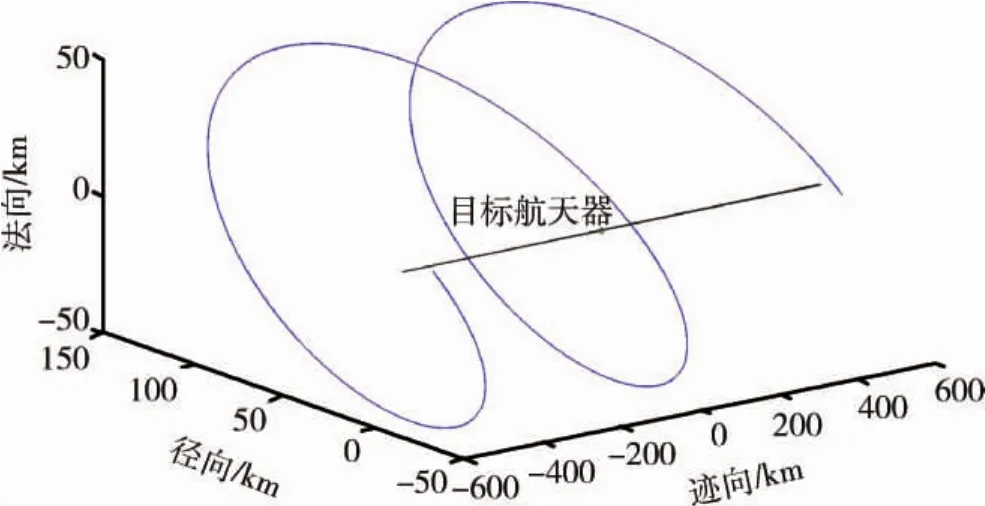
图4 改进后的单目标巡游轨道Fig.4 Corrected tourist orbit
2 多目标详查螺旋巡游轨道设计
2.1 设计思路
多目标详查螺旋巡游轨道设计在上述单目标巡游轨道设计方法的基础上,充分考虑静止轨道区域内目标不共面(部分航天器轨道倾角i>5°)的问题,针对性地提出多目标遍历的轨道设计方法和控制策略.
对于不同轨道平面的多个参考航天器,原先基于单个轨道平面设计的螺旋巡游轨道无法在不受控制的情况下利用自然漂移对多个参考航天器实现近距离绕飞观测.多目标详查螺旋巡游轨道的设计思路如图5所示.
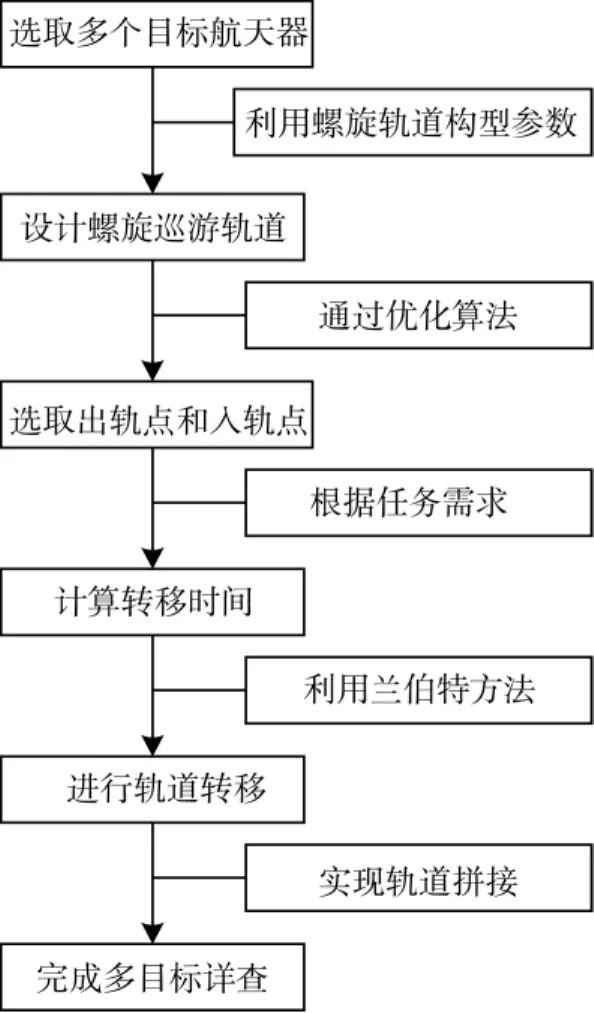
图5 多目标详查螺旋巡游轨道设计思路Fig.5 The design of helix tourist orbit of multiple target
其中,出轨点是指巡游航天器对参考进行一次完整绕飞观测之后即将进入轨道转移的起始点,入轨点是指轨道转移的终点即对下一颗参考航天器进行绕飞观测的起始点.选择的机理主要考虑如何通过选择合理的出轨点和入轨点提高观测效率、减小燃料消耗.轨道转移基于兰伯特方法,转移时间的选取根据任务要求确定.
2.2 仿真实现
设t0时刻两个参考航天器的轨道参数如表1所示.
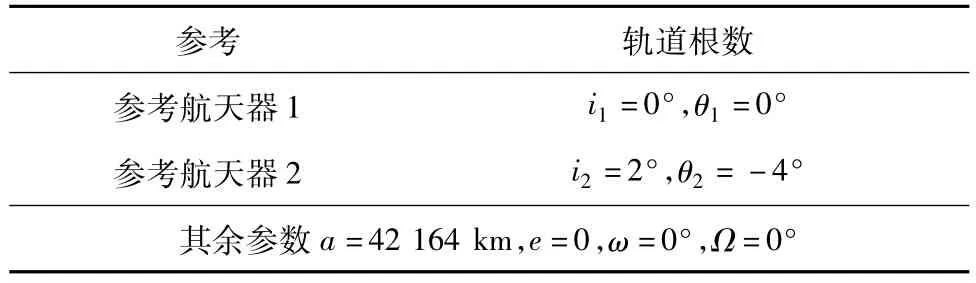
表1 参考航天器的轨道根数Tab.1 The orbital elements of targets
巡游半径R=150 km,巡游速度V=0.006 km/s,巡游平面内相位角θ=-90°,法向相位角φ=30°.首先针对两个参考航天器分别进行轨道设计,可以得到设计结果如图6所示.
设完成参考航天器1的观测后,需要在Δt≈6 h后实施对参考航天器2的观测,则选取C为出轨点,D为入轨点,利用兰伯特转移进行轨道机动,可以得到机动后对两个航天器的观测情况.巡游航天器对两个参考航天器的观测时间、观测视角以及轨道转移需要的能量如表2所示.
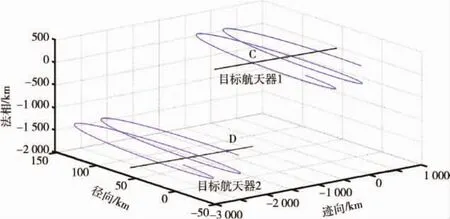
图6 两个目标的相对运动轨迹Fig.6 Relative motion of two targets

表2 观测情况Tab.2 The observation data
根据观测情况可以看出多目标详查螺旋巡游轨道由于要进行轨道面的转移其观测时间长、观测视角广,可以得到更加详尽的观测信息.
3 基于穿越点的多目标巡游轨道设计
3.1 设计思路
上述多目标详查螺旋巡游轨道设计为实现非共面参考航天器的详查,分别设计了针对两个参考航天器的巡游轨道,这样不可避免的带来巡游轨道的轨道平面的改变,需要消耗的能量较大.基于穿越点的多目标螺旋巡游轨道设计引入了穿越点的概念,即静止轨道的轨道平面都会与该基准平面形成穿越点,进行轨道的设计与控制.
基于穿越点的多目标巡游轨道的设计思路如图7所示.
设巡游航天器上携带有效载荷的最大观测距离为M,则巡游航天器到达参考航天器2附近时,参考航天器2所在纬度幅角应该满足

其中,r为参考航天器轨道半径.
据此,可获得巡游航天器从出轨点达到参考航天器2附近的时间为

其中,T为巡游航天器的运行周期.
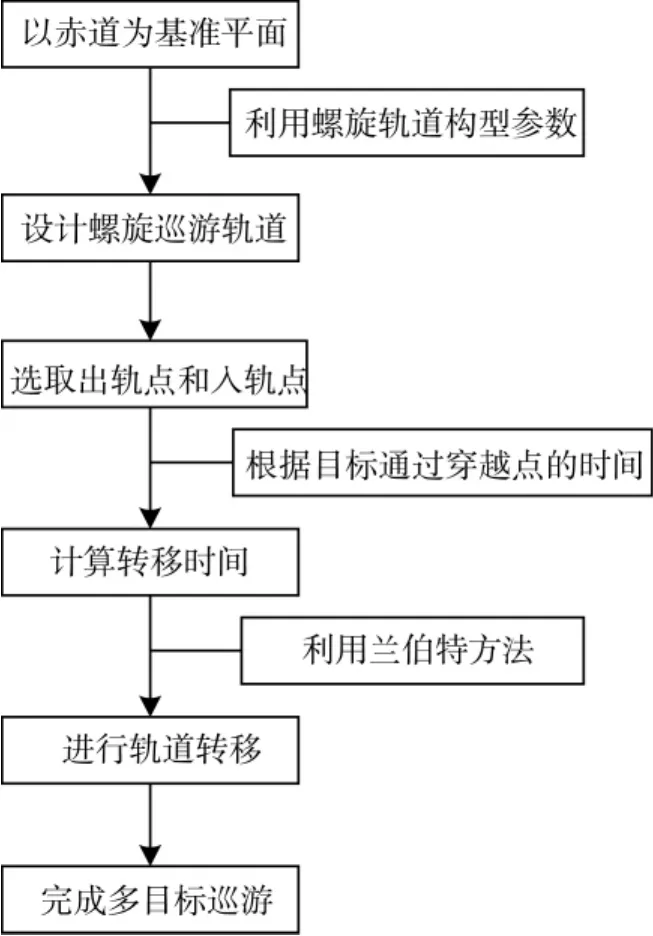
图7 基于穿越点的多目标巡游轨道设计思路Fig.7 The design of tourist orbit of multiple target on the base of traversing point
3.2 仿真实现
初始条件的设置同第2.2节.同时设最大观测距离为150 km,分析得知当巡游航天器完成对参考航天器1的绕飞观测,到达出轨点C时,参考航天器2的纬度φ=-1.9°,则根据需求当φ1=-0.1°时,巡游航天器2开始到达入轨点D,在基准平面内对参考航天器2进行绕飞观测,求得转移时间Δt2≈7 h.两者的距离变化如图8所示,观测情况如表3所示.
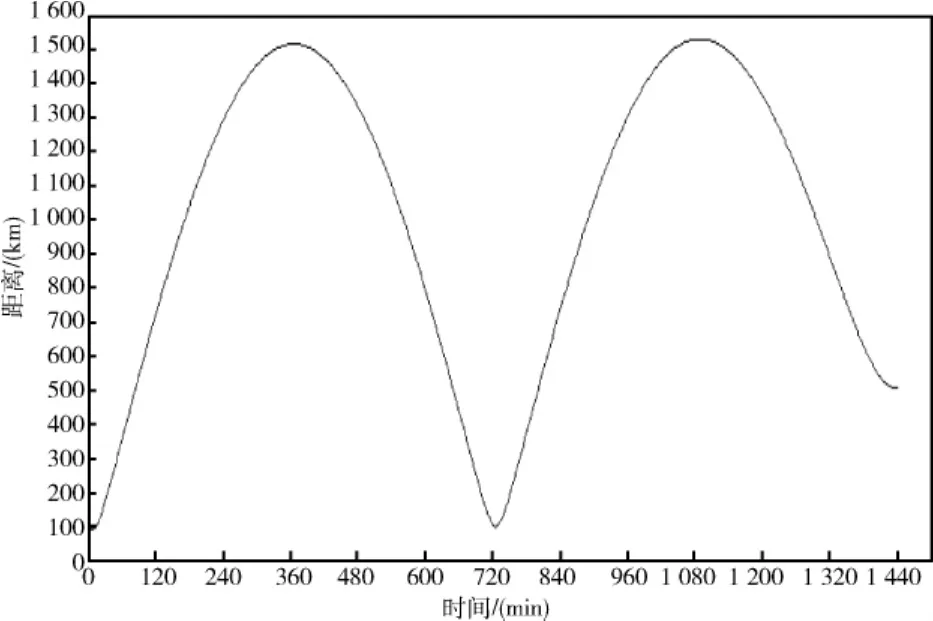
图8 相对运动距离变化Fig.8 The distance of relative motion
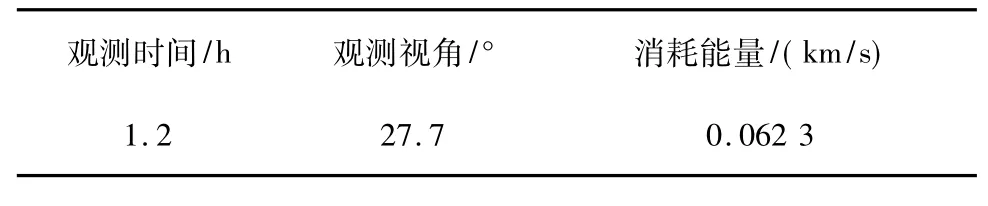
表3 观测情况Tab.3 The observation data
由于基于穿越点的多目标巡游轨道只能在参考穿过穿越点的短暂时间内进行绕飞观测,所以观测时间短、观测视角小,但是其利用了基准平面做绕飞观测,不需要进行轨道平面的转移,具有消耗能量少的特点.
4 结论
本文对螺旋环的最大迹向距离进行了推导计算,对多个地球静止轨道目标的巡游轨道设计进行了改进,提出两种不同的控制策略即多目标详查螺旋巡游轨道和基于穿越点的多目标螺旋巡游轨道,仿真结果表明设计方案可行,多目标详查螺旋巡游轨道消耗能量多、观测时间长、观测视角广;基于穿越点的多目标巡游轨道消耗能量少、观测时间短、观测视角小.
不同的轨道具有不同的特点,在实际应用的时候,应根据任务特点来进行轨道设计.不足之处在于对航天器的摄动分析有所欠缺,有待进一步完善.
[1] 宋博.美国“一箭三星”发射同步轨道空间态势感知卫星[J].国际太空,2014(11):60-63.
[2] 李雁斌,江利中,黄勇.天基参考探测与监视系统发展研究[J].制导与引信,2012(3):50-60.LI Y B,JIANG L Z,HUANG Y.Development research on space-based target detection and surveillance system [J].Guidance&Fuze,2012(3):50-60.
[3] 焦建超,庄绪霞,苏云,等.国外天基空间参考监视技术最新进展[C].第二十六届全国空间探测学术研讨会.北京:中国空间科学学会空间专业委员会,2013.
[4] 王若衡,曹秀云.美国计划发射地球静止轨道参考巡视卫星[J].中国航天,2014(4):36-37.
[5] 徐艳丽,张雅声.螺旋巡游轨道设计与仿真[C]//系统仿真技术及其应用学术会议.2014.
[6] 李恒年.地球静止卫星轨道与共位控制技术[M].北京:国防工业出版社,2010.
[7] 杨乐平.航天器相对运动轨迹规划与控制[M].北京:国防工业出版社,2010.
[8] 郗晓宁.近地航天器轨道基础[M].长沙:国防科技大学出版社,2003.
Design of Tourist Orbit of Multiple Targets on GEO
ZHENG Letian,XU Yanli,ZHU Dongjun
(The academy of equipment,Beijing 101416,China)
The spacecraft on the tourist orbit can travel around the GEO without control force.There are some disadvantages with the ground-based exploration network,so that the tourist orbit is supposed to improve the surveillance capability.In this paper,a initial orbit design is improved based on the previous design.Then by applying the control,two methods are proposed to observe the multiple targets on the GEO.Finally,simulation validations are given and their respective advantages are compared.
geosynchronous orbit;tourist orbit;relative motion;multiple targets
V412.41
A 文章编号:1674-1579(2016)05-0037-05
10.3969/j.issn.1674-1579.2016.05.007
郑乐天(1991—),男,硕士研究生,研究方向为航天任务分析与设计;徐艳丽(1978—),女,副教授,研究方向为航天任务分析与设计;朱冬骏(1991—),男,硕士研究生,研究方向为航天任务分析与设计.
2015-06-27