抗干扰技术在智能信号采集模块设计中的应用*
2016-04-08金晟姚丹
金 晟 姚 丹
(91550部队 大连 116041)
抗干扰技术在智能信号采集模块设计中的应用*
金晟姚丹
(91550部队大连116041)
摘要介绍了抗干扰技术在基于CAN总线通讯的智能信号采集模块设计中的应用,旨在解决舰船设备信号采集的可靠性问题。从软硬件设计方面分别讨论了系统的抗干扰措施,建立的双总线冗余架构进一步提高了模块工作的可靠性。
关键词信号采集; 抗干扰设计; 可靠性; CAN总线
Application of Anti-interference Technology in Design of Intellectualized Data Collection Module
JIN ShengYAO DAN
(No. 91550 Troops of PLA, Dalian116041)
AbstractIn order to improve reliability of marine equipment for signal collection, a series of anti-interference methods are presented. The hardware and software anti-interference designs are introduced in detail. An architecture of dual redundancy is adopted to further enhance reliability of the system.
Key Wordssignal collection, anti-interference design, reliability, CAN Fieldbus
Class NumberTN402
1引言
随着现代军事战场环境的日益复杂严酷,对军用装备的可靠性要求愈加严格。为提高舰船设备的可靠性,许多军用测控装备常常需要对现场采集的各类信号采取抗干扰处理措施,并进行数字化传输[1~2]。本文针对基于CAN总线技术的某舰用监测系统信号传输的可靠性问题,从系统架构及软硬件设计方面提出了抗干扰设计及措施。
2系统总体结构
系统由一个上位机及多个智能信号采集节点组成,所有智能节点通过CAN总线与上位机相连,对监控设备实现信息采集。虽然CAN总线的抗干扰能力和可靠性较强,但由于机舱环境极为恶劣,舰船航行过程中只能进行舰员级维修,一旦出现故障很难及时修复,所以对监控系统的可靠性要求很高,有必要对总线采取冗余设计[3~4],如图1所示。
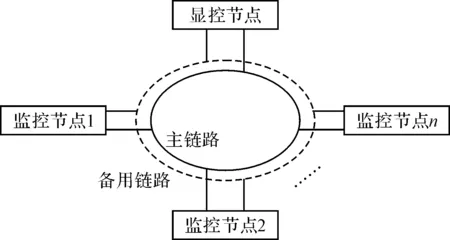
图1 系统结构图
该监测系统采用两条总线电缆,每个监控节点采用两个总线控制器。正常情况下主通讯链路投入运行,当主通讯链路发生故障时,启动备用通讯链路,保证整个系统的通信功能正常。为进一步提高链路可靠性,在链路冗余设计的基础上,采用环形网络拓扑结构。这样,每条链路上的节点均有左右两个通道接入网络,即使一条通道故障,也可通过另一条通道与其他节点保持通信。
3硬件抗干扰措施
舰船机舱内的电磁干扰现象特别严重[5],在机舱监控系统设计时必须考虑重点考虑系统的抗干扰措施。
3.1电源抗干扰措施
通过船用蓄电池供电可提供持续稳定的24VDC输出。24V输入电压经过EMC滤波稳压处理后,由隔离型DC/DC模块TEN5-2413降压为+15V,为传感器模拟板供电,该模块为主电源模块,选用TRACO公司的5W模块,具有良好的EMC特性。
数字板需要3.3V、1.8V、隔离5V三种电源,其中,非隔离型电源模块K7803-1500(L)将+15V电源降压为3.3V给DSP的IO部分供电,+3.3V电源经过线性电源AMS1117-1.8变换为1.8V为DSP内核供电。同时,+3.3V经过隔离型升压DC/DC模块B0305D-2W生成隔离5V电源,给CAN总线收发器供电。电源部分设计框图如图2所示[6]。
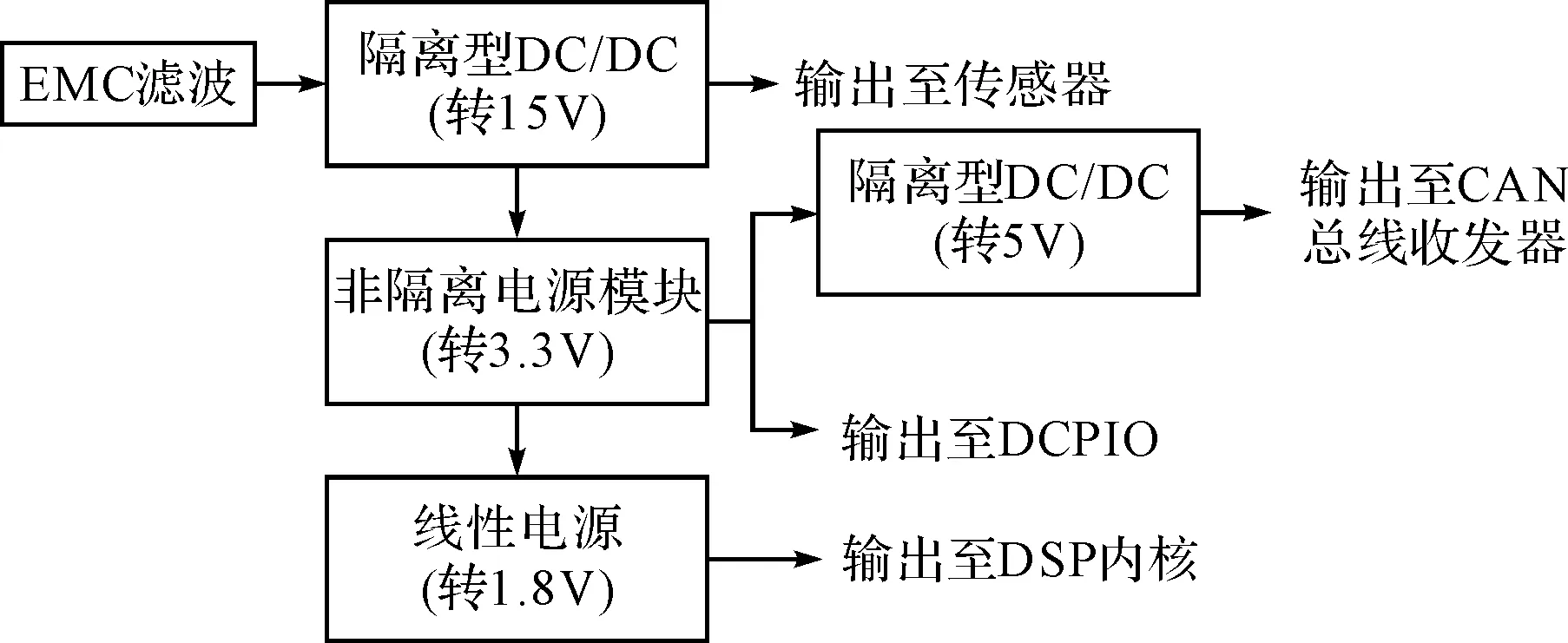
图2 电源模块框图
为解决电源中噪声和纹波,在DC/DC模块输出端和输入端外加滤波电容,以减少纹波值。输出滤波电容器的容值要适当,电容太大,很可能会造成启动问题。为了获得非常低的纹波值,可在DC/DC模块TEN5-2413输入输出端联接一个LC滤波网络。同时应注意电感值的大小及LC滤波网络其自身的频率应与TEN5-2413模块固有频率错开,避免相互干扰。为了确保TEN5-2413模块能够高效可靠的工作,除了规定最大负载(即满负载),同时也规定了一个最小负载。在使用时,要确保在规定输入电压范围内,其输出最小负载不能小于满负载的10%,严禁空载使用,在调试时应特别注意。若电路中实际负载功率确实较小,可在输出端并联一个适当阻值的电阻以增加负载。
3.2CAN总线抗干扰措施
监控系统的采用的双CAN总线冗余环形网络结构仍属于总线型网络拓扑,总线的两端需连接一个终端电阻。在系统网络设计中采用一种改良的总线终端来改善总线的电磁辐特性[7],如图3所示。具体做法是把每个终端电阻分成两个等值的电阻,例如用两个62Ω的电阻代替一个124Ω的电阻,中间分接点通过一个10nF或100nF电容连接到地,这种终端结构被称为分离终端。这种方法的特点是可以在两个分离终端的中间抽头上得到所谓的共模信号。理想情况下共模信号就是DC电压信号,可以通过一个电容(10nF~100nF)将中间抽头接地。实际应用过程中只将一个终端电阻接地,这样总线在中频和低频的范围内电磁辐射特性可以获得很大的改善。而如果两个终端均采用分离形式并单独接地,虽然能优化高频性能,但可能会通过地电流产生干扰性的回路电流,反而降低了分离终端所能带来的好处。

图3 分离终端设计
3.3去耦电路设计
数字电路信号电平转换过程中会产生很大的冲击电流,并在传输线和供用电源内阻上产生较大的压降,形成严重的干扰。为了抑制这种干扰,在电路中要适当配置去祸电路,采取的措施主要有[8]:
1) 在印刷电路板布线时,使杂散电容最小,尽量加大电源线和地线的走线宽度,同时布线导线尽量不弯成90°。
2) 在每个印制板入口处的电源线和地线之间并接一个大容量的电解电容(10μF~100μF)和一个0.01μF~0.1μF旅的非电解电容作为推耦电容。大电容用于去掉低频干扰成分,小电容滤掉高频干扰成分。
3) 在每个集成芯片电源和地之间都安置一个0.lμF的陶瓷电容器,当印制电路板空隙小装不下时,每隔4~10个芯片安置一个1μF~10μF的限噪声用的胆电容。
4软件抗干扰措施
串入监控系统的干扰,其频谱往往很宽,且具有随机性,硬件抗干扰措施只能抑制某些频率段的干扰,仍有一些干扰会侵入系统。因此,还要采取软件抗干扰措施。
4.1数字滤波
当系统中由于存在随机干扰使被测信号中混入了无用成份时,可以采用滤波器滤掉信号中的无用成份提高信号质量。模拟滤波器在低频和甚低频时实现是比较困难的,而数字滤波器则不存在这些问题。它具有高精度、高可靠性和高稳定性的特点,因此在智能化测量控制系统中被广泛用于克服随机误差。
本系统采用中值滤波法对采集到的模拟量信号进行软件抗干扰处理。对目标参数连续进行若干次采样,然后将这些采样进行排序,选取中间位置的采样值为有效值。
4.2软件陷阱
软件陷阱,就是用引导指令强行将捕获到的跑飞的程序引向复位入口程序,使程序转向专门对程序出错进行处理的程序[9]。程序设计常采用模块化设计,按照程序的要求一个模块、一个模块的执行,可将陷阱指令组分散放置在用户程序各个模块之间空余的单元中。在正常程序中不执行这些陷阱指令,保证用户程序正常运行。但当程序跑飞,一旦落入这些陷阱区,马上将程序拉到正确的轨道上。陷阱的多少一般依据用户程序大小而定,一般每1KB有几个陷阱就够。
4.3指令冗余抗干扰措施
指令冗余是指在关键的地方人为地插入一些重复指令或空操作指令。在采用C语言编程时采用重写关键指令与冗余语句结束符来实现;在采用汇编语言编程时采用在关键的地方的双字节指令和三字节指令后插入两个字节以上的空操作NOP指令来实现。
4.4其他抗干扰措施
除了采取上述这些抗干扰方法,在编程时还应注意以下几点:
1) 尽量采用单字节指令,以减少因干扰而程序乱飞的机率。
2) 慎用堆栈。在使用堆栈操作指令时,一次不能使用太多,减少子程序的个数,特别注意不要使子程序嵌套层次太多。从抗干扰的角度,堆栈的设置应远离程序区、数据区,最好单独设置。
3) 硬件看门狗电路的定时触发脉冲,最好不用内部定时器的中断方式,因为CPU因干扰有可能使主程序陷入死循环,但定时器中断仍然发生,继续发出触发脉冲,这样看门狗电路也就失效了[10]。
4) 对于采用的可编程I/O芯片,原则上在上电启动后初始化一次即可,但工作模式控制字可能因噪声干扰等原因受到破坏,使系统输入输出状态发生混乱。因此,在应用过程中每次用到这种接口时,最好对有关功能重新设定一次,确保接口可靠工作。
5结语
针对舰船严酷的使用环境及严格的可靠性要求,从系统结构及软硬件设计几个方面介绍了基于CAN总线结构的智能信号采集模块的抗干扰设计方法及措施。实践验证了上述设计方法及措施的有效性。
参 考 文 献
[1] Xiong Jianping, Cheng Zhenyu, You Zheng. On Board Computer Subsystem Design for the Tsinghua Nanosatellite[C]//The 20th AIAA International Communication Satellite Systems Conference and Exhibit,2002(5):12-15.
[2] Jack Elston, Eric Frew. Networked UAV Command Control and Communication[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit,2006(8):21-24.
[3] 禹春来.CAN总线冗余方法研究[J].测控技术,2003(22):10-11.
[4] K Arun. Achieving fault tolerance and high reliablility[J]. Microprocssors and Microsystems,1997(21):147-150.
[5] 张勇,汤仕平,龚亚樵.舰船电磁兼容性标准体系的构建[J].舰船科学技术,2011(3):95-96.
[6] 林超,朱若寒.一种船舶设备智能监测模块的设计与实现[J].舰船电子工程,2013(7):143-144.
[7] 饶运涛,邹继军,郑勇芸.现场总线CAN原理与应用技术[M].北京:北京航空航天大学出版社,2003:378-392.
[8] 税长江.基于CPLD的远程多路数据采集系统的研制[D].成都:西南交通大学,2004:22-23.
[9] 覃毅,汤荣江,李治龙,等.单片机应用系统的软件抗干扰措施[J].微计算机信息,2007(1):24-28.
[10] 何为民.计算机组成与嵌入式系统[M].北京:北京航空航天大学出版社,2007:23-54.
中图分类号TN402
DOI:10.3969/j.issn.1672-9730.2016.01.043
作者简介:金晟,男,硕士,工程师,研究方向:计算机网络、通信网络技术等。
*收稿日期:2015年7月10日,修回日期:2015年8月27日