基于不确定完成时间的项目进度控制模型及其应用*
2016-04-08崔良中郭福亮梁英杰
崔良中 郭福亮 梁英杰
(海军工程大学电子工程学院计算机工程系 武汉 430033)
基于不确定完成时间的项目进度控制模型及其应用*
崔良中郭福亮梁英杰
(海军工程大学电子工程学院计算机工程系武汉430033)
摘要对电子装备研发过程中的进度控制问题进行了研究。通过电子装备研发过程的分析,指出各步骤完成时间的不确定性是其主要特征,针对传统项目进度控制方法存在的假设前提过于理想化,在实际应用中偏差较大的问题,提出了基于不确定完成时间的解决方案,以关键路径算法为基础,将研发过程中某一任务的完成时间设置为一个时间范围内的某一点,建立数学模型,通过最小化相同状态下当前方案与最优解方案之间的差异,达到调整项目计划安排的目的。实验证明,该方案更贴近于电子装备项目研发的实际,可以有效地控制项目进度并优化。
关键词电子装备研发; 关键路径算法; 不确定完成时间; 项目进度控制
Introduction and Application of Project Schedule Control Model Based on Uncertain Completion Time
CUI LiangzhongGUO FuliangLIANG Yingjie
(Department of Computer Engineering, Institution of Electronic Engineering, Naval University of Engineering, Wuhan430033)
AbstractThe process control problem in the development provess of electronic equipment is analyzed. The analysis of electronic equipment development process proves that the uncertainty on the completion time of each step is the main feature. For that the assumption of the traditional project schedule control methods realistic and there is large deviation in practical application, a solution based on uncertain completion time is proposed. Based on critical path algorithm, the completion time of task is set as a point within a time scope, and a mathematical model is established to the project plan by minimizing the difference between the scheme and optical solution under the same status. The experiment proves that the proposed solution is more close to the actual project of research and development of electronic equipment, and can effectively control and optimize the project schedule.
Key Wordselectronic equipment research and development, critical path algorithm, uncertain completion time, project schedule control
Class NumberO141.4
1引言
电子装备项目具有创新性,这也导致了项目完成时间与质量的不可预测性,为了尽可能地提高项目研发的成功率,同时保证项目能够取得应有的效益,对于整个研发过程进行科学合理的进度控制必不可少[1]。在项目管理的各个组成部分中,进度控制管理直接影响到项目成本、项目质量等方面。合理的进度控制可以有效地对项目的风险进行控制和管理,同时,通过缩短研发时间,可以使电子装备更早地投入应用,更好地为生产者创造利益。
目前在项目进度控制方面常用的方法包括:甘特图法[2]、关键路径法[3]、计划评述法[4]、关键链项目管理法等[5],这些方法在特定的应用条件和对象下,能够取得较好的效果,但对于电子装备项目管理,由于其存在着的任务完成时间不确定性,上述方法在进度控制方面显得力不从心[6~7]。
2电子装备项目研发进度控制
基于对电子装备项目研发特点的分析,结合当前所使用的进度控制方法,分析目前存在的问题,并提出改进方案。
2.1目前电子装备项目研发进度控制方法及存在的问题
目前对于电子装备项目研发进度的控制方法主要是基于网络分析,而关键路径法是其中最为典型的应用,该方法将项目分解为多个子任务,作为网络图中的结点,并确定每一个结点的最早和最晚开始及结束时间,然后确定关键路径,并考虑不同任务之间的关联关系。关键路径算法在其他资料中介绍得较多,这里不再赘述。
关键路径法、计划评述法、关键链项目管理法等,都是首先建立子任务网络,寻找关键路径,再通过对关键路径研发时间的压缩完成进度的优化控制,然而,上述方法并不一定适用于电子装备的研发过程[8~9]。由于电子装备研发过程中受到技术因素的影响较大,所以研发过程的重构和重组已经成为一种常态化的行为,而由于技术原因导致的项目重做也时常发生;另一方面,由于设备因素和资金因素的约束,在某一时刻内,关键任务较易出现无法拥有充分资源的问题,从而影响到子任务的顺利完成。基于网络分析的进度管理方案对上述两个方面都无法建立起合理的模型,进而导致对电子装备研发整个项目进度控制的不力。
2.2基于不确定完成时间的进度控制模型
结合关键路径方法和PERT方法的优点,对现有的项目进度控制方法进行改进。首先构建子任务网络,然后引入不确定完成时间,设置最大后悔参数,建立适用于电子装备项目研发的进度控制模型。
关键路径方法和PERT方法对于子任务的完成时间都做了较为确定的假设,而本方法则将网络中某一结点的完成时间设置为某一个时间范围内的任意点。时间范围内选择任意一个点都可以生成一个进度控制方案,因此,其关键路径并非是唯一的,从而最终完成时间也是不确定的。通过对数学模型的构建和求解,可以使所选择的关键路径完成时间最大化接近于实际的完成时间。
在数学模型的构建过程中,引入了最大后悔值的相关理论,最优化的进度控制方案,应使模型中的最大后悔值实现最小化。对于后悔值的定义,是指数据控制方案的理论结果与最优结果之间的差值。
将电子装备项目进行任务分解,构成一个无环的网络,定义为G=(N,E),N为节点,代表子任务的起止时间,E为边,代表子任务。
设两个节点之间的路径为M,则对于某一个控制方案,其最长的路径可以表示为式(1):
(1)
其中,如果边(i,j)属于x,则xij=1,如果不属于,则xij=0。
对于可接受的进度控制方案,都存在着一条关键路径,我们所要做的工作,就是要根据实际的项目进展情况,评估整个项目的完成时间。
具体到项目进度控制方法,某一路径的最大后悔值定义为:
对于某一方案的确定关键路径x∈M,在所有可接受的方案序列S下,x最大的后悔值定义如式(2)所示:
R(x)=maxs∈S{maxy∈MR(y,Ts)-R(x,Ts)}
(2)
由此,对于项目进度控制的优化问题可描述为
R*=minx∈MR(x)
=minx∈Mmins∈S{maxy∈MR(y,Ts)-R(x,Ts)}
(3)
为了更清楚地对数学模型的构建进行描述,定义公式的表达方式如下:
(4)
则进度控制时间可表示为如式(5)所示:
(5)
对于x∈M,式(6)成立
R(x)=Rs(x)(x)=Rs(x)-R(x,ts(x))
(6)
以上对数学模型的相关定义进行了讨论,以此为基础建立进度控制模型。
对于某一进度控制方案s,节点1~n之间的最大后悔值如式(7)所示:
(7)
可证明,式(7)为凸函数。
电子装备项目研发进度控制的优化的目标函数是Rs(x)(x),可表示为式(8):
Rs(x)=minα1-αn
(8)
其中,(α1,α2,…,αn)是式(8)的可行解,利用式(9)对该表达式进行重写和描述:
(9)
式(9)是一个分段凸函数,因此可以取到该函数的最大值。由此可以得到引入不确定时间和最大后悔值理论后的电子装备项目研发进度控制数学模型如式(10)所示:
(10)
3案例对比
为了验证所建立的电子装备项目进度控制方案的正确性,通过对同一个应用案例使用两种进度控制方法进行规划,对比处理结果的方式进行处理。
假设某一类型的电子装备的研发过程包括以下几个步骤:可行性分析、形成团队、项目风险评估、需求分析、系统总体设计、系统详细设计、系统开发、内部测试、试用测试。由此,将该装备研发项目分解为九个子任务,并构建出子任务的网络图,如图1所示。
其中,节点1为起始点,节点5为终止点。图中的每一条线都代表一个子任务,线上的前一个数字代表乐观的完成时间,后一个数字代表悲观的完成时间。
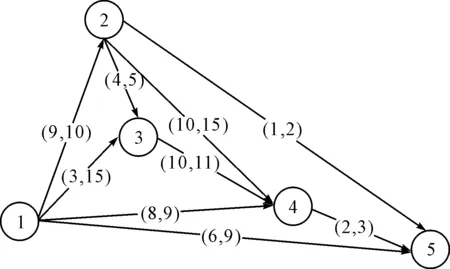
图1 某电子装备项目任务分解图
利用传统的关键路径算法进行处理,其目的是指到图中总执行时间最长的路径,并且保证该路径上的任务具有最高的资源所有权。根据关键路径算法,得到最终的关键路径为{(1,3),(3,4),(4,5)},如图2所示。节点3的启动是以(1,3)和(2,3)两个任务的结束为前提条件的,一旦上述两个任务由于一些原因无法近期完成,则会对之后的工作造成较大的影响,进而影响到整个项目进度的控制,而在电子装备项目的研发中,这种延误的情况发生的可能性很大,甚至会出现重组等情况,所以关键路径方法在电子装备研发项目进度控制的使用中,具有很大的局限性。
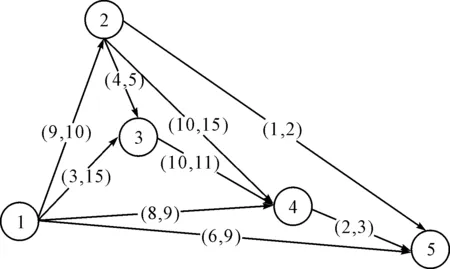
图2 关键路径法确定的项目进度控制方案
利用基于不确定完成时间的项目进度控制模型,可以较好地解决使用关键路径方法存在的问题。根据其数学模型,对案例中的子任务和节点进行处理,得到:
minα1-9x12-3x13-8x14-6x15-4x23
-10x24-x25-10x34-2x45
x12+x13+x14+x15=1
x23+x24+x25-x12=0
x34-x13-x23=0
x45-x14-x24-x34=0
-x15-x25-x45=-1
α1-α2+x12≥10
α1-α3+12x13≥15
α1-α4+x14≥9
α1-α5+3x15≥9
α2-α3+x23≥5
α2-α4+5x24≥15
α2-α4+x25≥2
α3-α4+x34≥11
α4-α5+x45≥3
xij∈{0,1}
α5=0

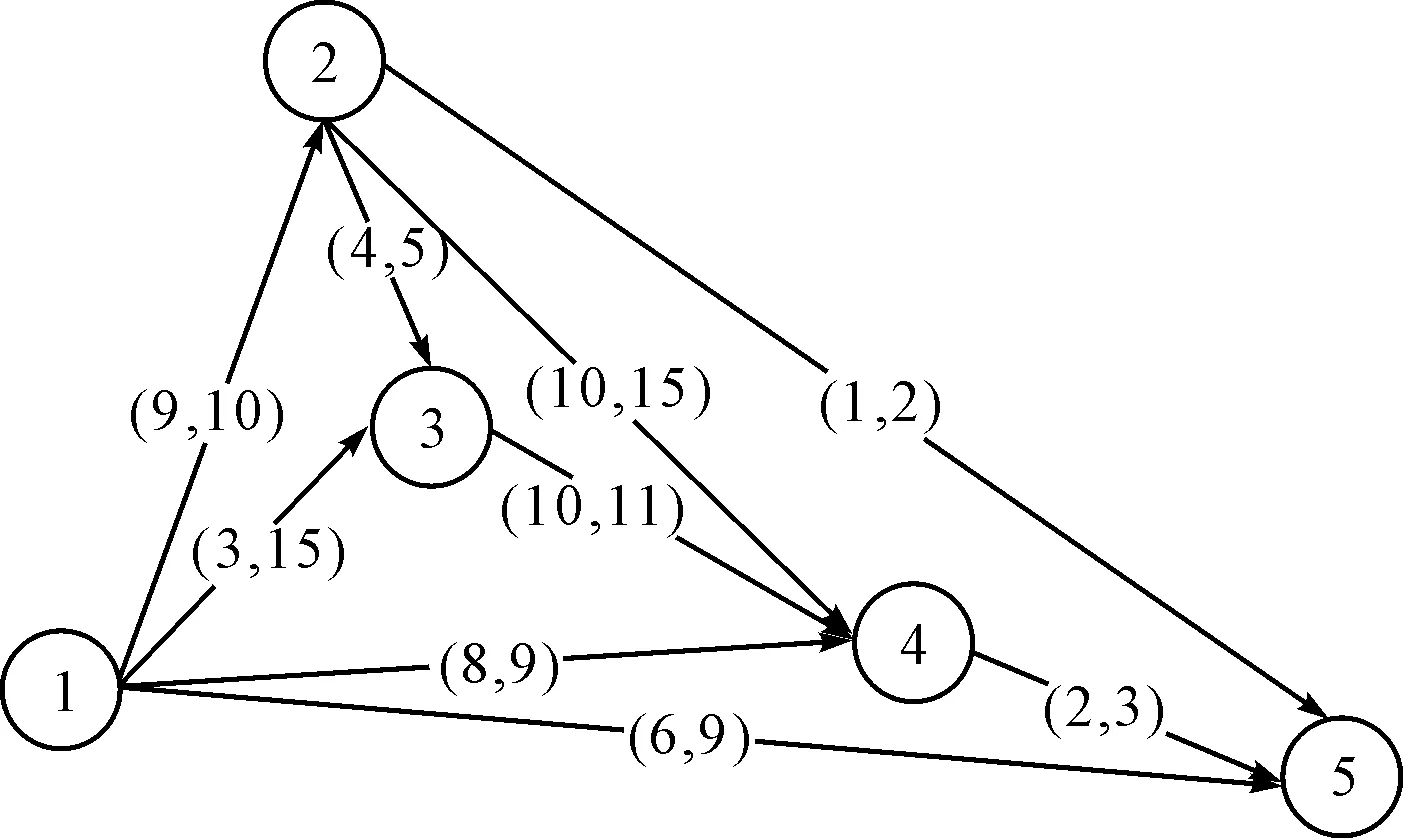
图3 不确定完成时间法的项目进度控制路径
4结语
由于电子装备项目的研发受到技术因素、设备因素、资金因素等的影响,易发生子任务完成时间与计划方案有较大差异,导致进度控制困难的情况,研究了基于不确定时间的项目进度控制模型,引入了最大后悔值理论,通过数学模型的建立和求解,实现关键路径的最优化。实例证明,该方法相比于其他的项目进度规划控制方法,更贴合于电子装备项目研发的特点和实际,能够取得更好的控制效果。
参 考 文 献
[1] Keefer D. Allocation planning for R&D with uncertainty and multiple objectives[J]. IEEE Transactions on Engineering Management,2011,52(1):8-14.
[2] Pappas A., Remer S. Measuring R&D productivity[J]. Research Management,2010,38(3):15-22.
[3] Song Lisa Z. Song Michael. The role of information technologies in enhancing R&D marketing integration: An empirical investigation[J]. Journal of Product Innovation Management,2011,27(3):382-401.
[4] Nakamura Yoshiaki, Watanabe Chirico. Management and the effect of MITI’s R&D project: Case study from a supercomputer project[J]. Tec Novation,2013,23(3):221-238.
[5] 李欣先.基于R&D项目阶段的评估研究[J].河北工业大学学报,2012(12):13-14.
[6] 周小桥.关键路径法.确定项目工期及活动时差[J].项目管理技术,2012(3):42-45.
[7] 朱曙.项目进度控制方法从CPM/PERT到CCM[J].硅谷,2011(2):82-83.
[8] Lawrence P Leach. Critical Chain Project management Improves project Performance[J]. Project Management Journal,2009(6):39-52.
[9] Tolga A. Cagri. Fuzzy multicriteria R&D project selection with a real options valuation model[J]. Journal of Intelligent and Fuzzy Systems,2011,19(4-5):359-371.
中图分类号O141.4
DOI:10.3969/j.issn.1672-9730.2016.01.029
作者简介:崔良中,男,硕士,讲师,研究方向:计算机应用技术。
*收稿日期:2015年7月1日,修回日期:2015年8月27日