X波段靶场测量LFMCW雷达系统设计*
2016-04-08卢建斌席泽敏
李 成 卢建斌 席泽敏
(1.海军试验基地总体所 葫芦岛 125105)(2.海军工程大学电子工程学院 武汉 430033)
X波段靶场测量LFMCW雷达系统设计*
李成1卢建斌2席泽敏2
(1.海军试验基地总体所葫芦岛125105)(2.海军工程大学电子工程学院武汉430033)
摘要针对复杂环境下靶场测量LFMCW雷达的设计要求,分析了X波段雷达波的传播特性,结合靶场测量范围和测量精度的要求,提出了基于合作目标的靶场测量LFMCW二次雷达的系统设计方法,给出了雷达系统的主要设计参数,对比评估了一次雷达和二次雷达两种体制下LFMCW雷达的探测能力。
关键词雷达系统; LFMCW; 靶场测量; 距离方程; 传播损耗
System Design of X-band LFMCW Radar for Range Measurement
LI Cheng1LU Jianbin2XI Zemin2
(1. The Experiment Basement, General Research Institute, Huludao125105) (2. Electronic Engineering College, Naval University of Engineering, Wuhan430033)
AbstractAccording to the design demand of LFMCW radar for range measurement in complex environment, propagation characteristic of X-band electromagnetic wave is analyzed. And the system design method of LFMCW radar for range measurement is presented for the measurement range and the precision. Based on the radar parameters designed, secondary LFMCW radar is evaluated and compared with the primary radar. The analysis results show that the secondary LFMCW radar can satisfy the application demand.
Key Wordsradar system, LFMCW, range measurement, range equation, propagation attenuation
Class NumberTN95
1引言
在目前靶场测量雷达中,连续波测量雷达占有重要的位置,其通过发射连续的射频振荡信号,利用目标回波所产生的多普勒频移,探测与雷达有相对运动的目标,并测定目标径向速度。随着多频、调频测距技术和相位阵列天线技术的应用,连续波测量雷达也可以完成目标距离、角度等参数的测量[1~2]。
最简单的单频连续波雷达目前主要用于靶场多普勒测速,它是靶场武器实验中的一个主要测试手段,它用来测量弹丸在各个时间点上的速度,并据此算出弹丸飞行弹道,国际上比较有代表性的测量雷达是丹麦Weibel公司生产的Weibel测速雷达,采用的是基于FFT技术的频域测速体制。然而这种靶场测速雷达基本上只具有测速功能,而没有测距功能。而调频或者多频连续波雷达在单频连续波的基础上,扩展了测量功能,能够利用发射信号的特点测量目标的距离,实时测量试验中目标脱靶量、弹靶遭遇轨迹、弹靶动态相对位移等参数,如Weibel公司在2000年前后推出的RR-60034多频连续波测量雷达。同时由于其还具有辐射功率小、测距测速精度高、分辨率高、大时宽带宽和低截获等优点,在精确测量领域具有广泛的应用[3~4]。
2雷达系统设计要求
对于靶场测量雷达而言,除了具备一般雷达系统所要求的探测性能外,通常重点考虑以下三个方面的性能要求。
1) 测量精度
靶场测量雷达主要功能是精确测量弹和靶的空间位置和运动速度,因此测量的高精度是该雷达始终追求的目标。对于常规脉冲雷达而言,脉冲宽度越窄,测距精度越高,最小作用距离也越小,但对于信号处理的时间采样速率也要求越高。而对于X波段调频连续波而言,易于获得大带宽信号,提高系统的分辨率和测距精度,达到米级或亚米级的测距精度,同时接收机视频部分的信号带宽又远小于信号带宽,因此易于工程实现。
2) 作用距离
考虑到靶场测量应用的实际需求,测量雷达对目标的探测距离通常不会很近,一般要求作用距离都在30km以上,同时由于是在试验区范围内测量,因此探测距离也不需要像警戒雷达那样要求在300km或500km以上。结合工程应用实际,所设计的靶场测量雷达要求对各种导弹类目标的探测距离不小于60km。
3) 复杂环境适应性
由于在试验过程中可能会考虑到复杂电磁或气象环境下的靶弹测量,因此要求测量系统具有良好的抗干扰能力,能够有效抑制各种人为有源干扰、无源气象干扰,同时能够在各种气象环境下稳定工作,有效探测和跟踪目标。
3雷达波传播损耗
通常情况下雷达波的传播衰减与工作频率紧密相关,在频率的低端,如高频HF、超高频UHF、甚高频VHF,雷达波的大气衰减很小,几乎可以忽略不计。但是在微波波段,雷达波在大气中的传播衰减明显增大。下面分别针对晴朗天气、降雨、云雾、降雪四类气象环境来分析雷达波传播过程中的损耗。
3.1晴朗天气
在晴朗的天气条件下,如果雷达工作在较低的工作频段上,那么大气对电磁波衰减可以近似忽略不计,但是随着雷达频率的升高,大气衰减越来越明显。假设雷达波束的仰角为θ0,对于传播距离为R的路径,其大气衰减可通过沿雷达波射线跟踪路径与高度相关的衰减系数的积分求得,Blake给出的近似计算公式如式(1)[5]
La=
(1)
其中,ka0为海平面衰减系数,ha=6.95km为标准指数折射率模型的标度大气高度,h0为海平面以上的雷达高度,所有距离单位均为km,La的单位为dB/km。式中使用了地球的有效半径常数k和地球半径a=6378km。
对于不同目标仰角和雷达工作频率的衰减曲线如图1所示。图中曲线的起始斜率代表的是海平面衰减系数,当距离较远时曲线变得平坦,这是由于波束离开高大气密度区域的结果。对比图1中各曲线可以看出,随着雷达工作频段的升高,大气的衰减明显增大;随着雷达波束仰角的增大,大气的衰减逐渐减小,这也说明仰角的增大,在相同的传播距离上电磁波更容易离开海面高密度大气区域。从图中可以估算出针对X波段雷达波在晴朗天气下传播60km衰减约为1dB~2dB。

图1 X波段雷达波晴朗天气下的大气衰减
3.2降雨天气
降雨对雷达波的衰减与降雨量、雷达波频率、极化形式、环境温度、降雨区域分布等参数有关。目前常采用的是国际电信联盟推荐的CCIR模型,该模型是基于大量统计数据的经验模型[6],表达式为
Lr=arb(dB/km)
(2)
式中a和b为与雷达工作频率、极化方式有关的系数,r为降雨量,单位是mm/h。针对不同雷达极化方式,参数a、b的取值如表1所示。
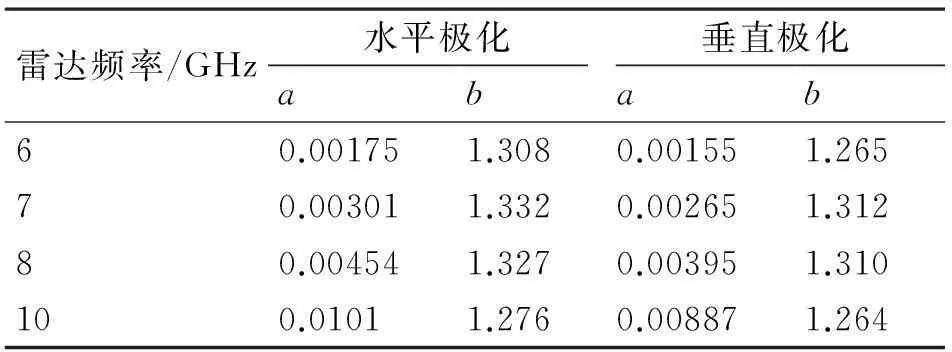
表1 降雨天气下衰减系数a、b的取值
根据式(2)所得雷达在1GHz~10GHz工作频段上,针对不同降雨量天气条件的单程传播衰减如图2所示。

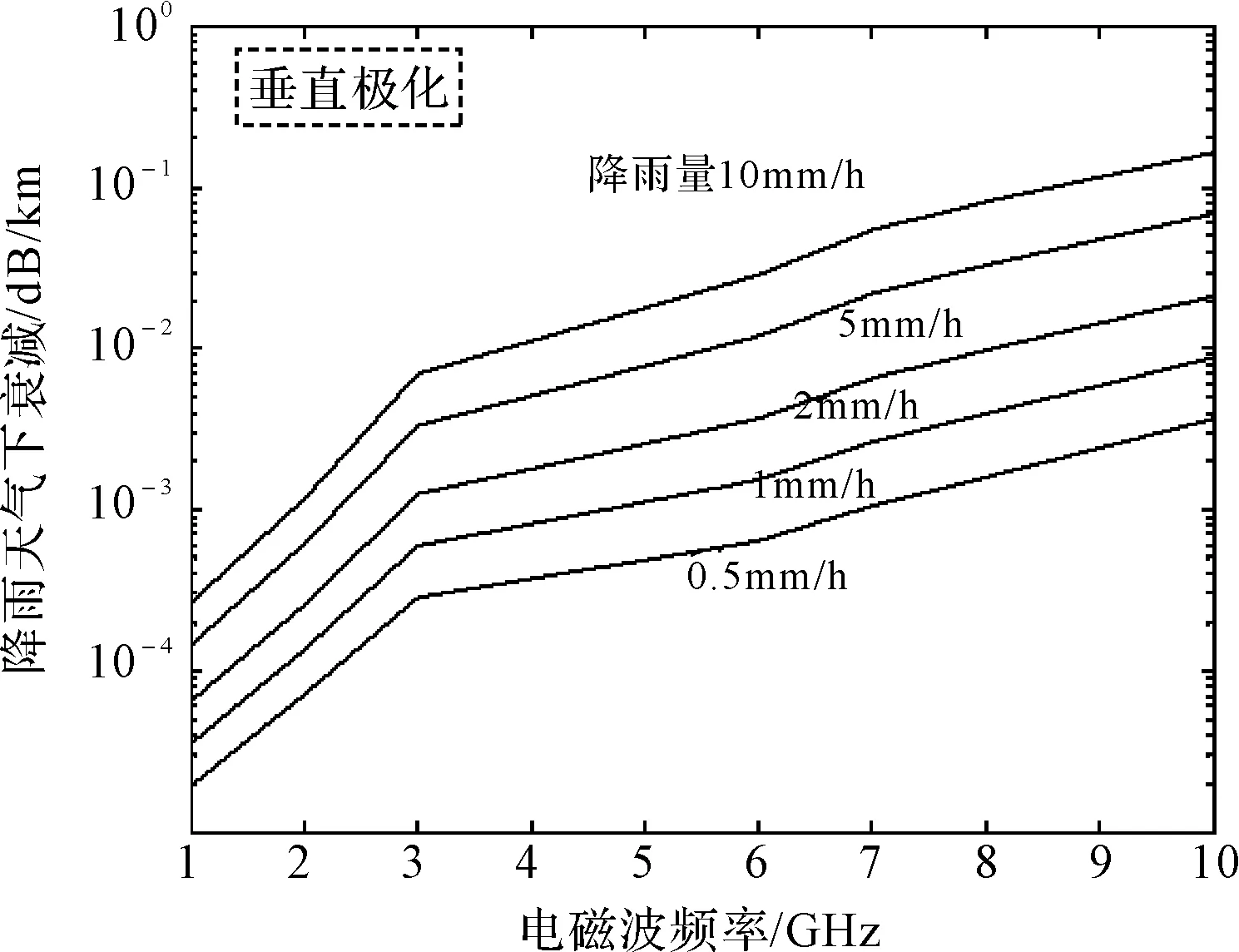
图2 不同频率、极化、降雨量条件下的电磁波单程衰减
从图中可以看出,随着雷达工作频率的升高,电磁波传播衰减逐渐增大;同时随着降雨量的增加,传播衰减也是呈现逐渐增大的变化规律。对于X波段水平极化电磁波,在10mm/h的降雨量条件下雷达波传播的单程衰减约为0.2dB/km,那么传播60km后大气的衰减为12dB。
3.3云雾天气
当空气中水粒子直径小于0.005cm时通常表现为云或雾等气象条件,此时雷达波传播过程中的衰减可表示为
(3)
其中m为云雾中的含水量,单位为g/m3,λcm为单位为cm的雷达波长。通常情况下,m的取值在0.05~1或2.5之间,经过测量数据的统计很少有超过0.6g/m3。
在雷达工作的微波波段,不同云雾含水量条件下电磁波的单程传播衰减曲线如图3所示。
从图中可以明显地看出随着雷达工作频率的升高,相同云雾天气下电磁波传播衰减逐渐增大;同时随着云雾含水量的增加或能见度的下降,传播衰减也是呈现逐渐增大的变化规律。例如针对X波段极化电磁波,在云雾含水量4.2g/m3(等效能见度20m)条件下雷达波传播的双程衰减约为0.2dB/km,那么传播60km后大气的衰减为12dB。

图3 云雾条件下不同频率电磁波单程衰减
3.4降雪天气
已有研究表明,通常情况下降雪、冰雹等气象条件电磁波传播衰减比同样降水量的雨水的衰减要小。其传播衰减的计算公式为
(4)
其中r为降雪量,单位是mm/h,fGHz表示单位为GHz的雷达频率。图4给出的是微波波段雷达在不同降雪量条件下电磁波的单程传播衰减曲线。

图4 不同频率及降雪条件下的电磁波单程衰减
从图4中可以看出随着雷达工作频率的升高,相同降雪量的情况下电磁波传播衰减逐渐增大;同时随着降雪量的增大,传播衰减也是呈现逐渐增大的变化规律。针对X波段电磁波而言,在10mm/h降雪量条件下电磁波传播的单程衰减约为0.05dB/km,那么传播60km后大气的衰减为3dB。
综合上述分析,对于复杂气象条件(如雨天10mm/h或雾天4g/m3),选择X波段传播60km的单程气象衰减大约在12dB左右。
4LFMCW雷达系统设计
4.1基于一次雷达体制的系统设计
根据基本雷达方程以及连续波雷达特点,LFMCW一次雷达距离方程可表示为[7~8]
(5)
其中:Rmax为雷达的最大作用距离;D0为连续波雷达天线物理隔离度;DTR为端口对消器的对消比;Prmax为接收天线端口电平[9~10];TB为发射信号时宽带宽积;Gr和Gt分别为接收和发射天线增益;λ为电磁波波长;σ为目标散射截面积;k为玻耳兹曼常数;T0为接收机噪声温度;Bn为雷达接收机匹配带宽;Fn为接收机噪声系数;(S/N)min为雷达最小可检测信噪比;L为损耗,包括系统内部损耗和传播损耗。
对于系统的工作频段,因为频段过高时,如K波段或毫米波波段,由于大气衰减较大通常只用在近程目标探测;当选择频段过低时,如C、S和L波段,此时设备的体积、重量较大,综合考虑选择雷达的工作频段在X波段。对于发射和接收天线,假设X波段天线孔径为1m2时,天线增益约为41dB。对于发射信号的带宽,由于要对弹靶进行精确测距,因此系统的距离分辨率要求较高,当设定系统的距离分辨率为3m时,发射信号的带宽最少为50MHz。对于发射信号的时长,由于设定的最大作用距离为60km,因此对于不模糊测距而言,发射信号的最小重复周期为0.4ms。对于连续波雷达而言,发射信号时长通常要远远大于最大作用距离,这里取10倍关系,即发射信号的调频时长为4ms。
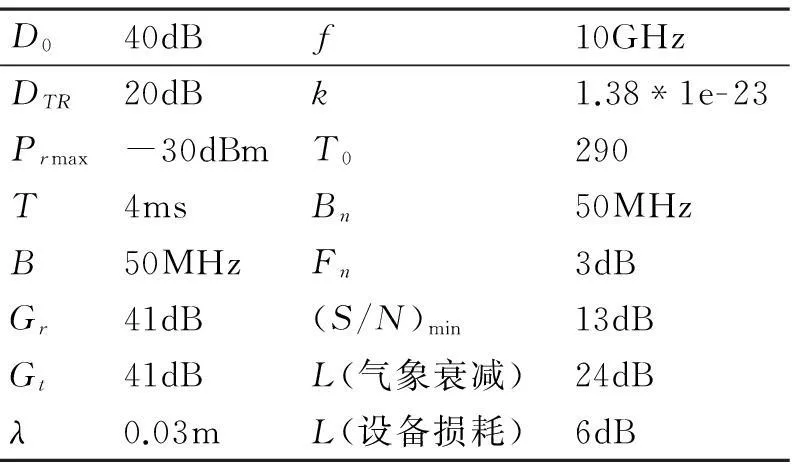
表2 LFMCW一次雷达参数设置
对于雷达散射截面为1m2的目标,当雷达参数选取如表2所示时,计算得出雷达的作用距离为6.8km。
显然上述作用距离难以满足设计要求。如果要加大雷达的探测距离,在雷达工作频率、发射/接收天线、发射信号波形均固定的条件下,只能加大发射机的输出功率,然而考虑到连续波雷达收发隔离的限制,发射机功率不可能太大。因此对于一次连续波雷达而言,其作用距离很难满足系统设计要求。
4.2基于二次雷达体制的系统设计
LFMCW二次雷达距离方程为
(6)
此时地面雷达与目标采用合作方式工作,首先雷达发射LFMCW信号至目标,目标上的接收机接收到信号之后,立即回馈一个信号至地面雷达接收。对于上述二次雷达方程,考虑到系统的适装性,发射接收天线设计为0.01m2,物理隔离度D0为20dB,端口对消比DTR为10dB,发射信号的调频时长为0.4ms,同时气象衰减变为单程传播衰减,具体参数参见表3,由此计算得出雷达的作用距离为67km,此时是可以满足系统设计指标要求的。

表3 LFMCW二次雷达参数设置
进一步,对于一次雷达而言,当测距精度指标要求在米级时,目标本身的尺寸就可能超出了测距精度要求,在回波中可以会存在目标强散射点的不稳定引入的测距误差。对于二次雷达而言,由于目标返回信号总是从发射天线处返回,因此对于雷达系统而言,目标就可认为是一个理想的点目标,不存在散射点不稳定的情况。
5结语
针对目前靶场试验存在的精确测量难题及未来新型战术导弹试验需求,探索靶场测量雷达的系统设计方法,本文提出了X波段LFMCW二次测量雷达的新思路,对其系统指标和关键技术参数进行了论证分析,并与一次雷达进行了对比,阐述了二次测量雷达在雷达探测范围、测距精度等方面存在的优势。
随着数字信号处理,特别是DSP器件的发展发展,LFMCW雷达作为一种新的测量雷达体制必会具备更为广阔的应用前景。下一步需针对LFMCW信号的精确测距、多目标跟踪以及系统小型化、高集成度设计方面作进一步的深入研究。
参 考 文 献
[1] M. I. Skolnik. Introduction to radar systems[M]. Boston: McGraw-Hill Press House,2001:378-435.
[2] 谭朔,郭伟.调频连续波近程测距系统研究[J].舰船电子工程,2007,7(4):95-99.
[3] 曹延伟.多频连续波雷达跟踪控制器设计及相关理论和算法研究[M].长沙:国防科技大学,2005:4-9.
[4] M. Ferrerasjm. Helicopter classification with a high resolution LFMCW radar[J]. IEEE Transactions on Aerospace and Electronic Systems,2009,45(4):1373-1384.
[5] P. Z. Peebles. Radar principles[M]. NewYork: John Wiley & Sons Inc,1998:34-44.
[6] 严军超,胡明宝.相控阵天气雷达气象雷达方程修正研究[J].现代雷达,2015,36(5):1-5.
[7] 何源,袁飞,朱彬.线性调频连续波雷达的距离估算[J].成都大学学报,2005,24(4):301-303.
[8] 王颖,曲长文,苏峰.FMCW SAR雷达方程[J].雷达科学与技术,2008,6(3):178-181.
[9] 李鲜武.数字调频连续波测距雷达方程[J].雷达科学与技术,2009,7(5):329-332,338.
[10] 顾红,李玺,尚卫华,等.解决连续波雷达泄漏的一种新途径——周期方波断续法[J].电子学报,1998,26(12):7-11.
中图分类号TN95
DOI:10.3969/j.issn.1672-9730.2016.01.018
作者简介:李成,男,硕士,高级工程师,研究方向:雷达效能评估、试验通信与测量。卢建斌,男,博士,讲师,研究方向:雷达系统设计、雷达信号处理。席泽敏,男,博士,副教授,研究方向:雷达系统设计、雷达信号处理。
*收稿日期:2015年7月2日,修回日期:2015年9月2日