二次雷达驱动分系统设计
2016-04-07张奇
张 奇
(马鞍山职业技术学院 电气工程系,安徽 马鞍山 243031)
二次雷达驱动分系统设计
张奇
(马鞍山职业技术学院 电气工程系,安徽 马鞍山 243031)
摘要:针对二次雷达驱动分系统中两个关键问题提出设计方案,通过超越离合器与双PLC冗余系统的应用设计解决了在天线发生故障的情况下实现不停机的自动切换问题;通过对电路的重新设计,解决了大功率驱动设备对中央控制单元的电磁干扰问题。
关键词:二次雷达;冗余系统;电磁干扰;Modbus协议
0概述
二次雷达是一种收发采用不同频率的雷达,主要用于对象的识别。二次雷达可获取对象的点迹位置、速度、高度、航迹、代码等重要信息,可以说是空中交通管理的中枢系统[1]。
二次雷达驱动分系统作为二次雷达的一个重要组成部分,包括两套互为冗余的控制设备与机构(天线转台除外),符合二次雷达对于设备可靠性高的要求,能够24小时不停机连续运转。当一套控制设备在发生故障的时候,中央处理单元PLC一方面可以通过串口向终端报警,另一方面立即将另一套控制设备投入使用。驱动系统在研制过程中的关键技术问题在于如何解决在天线发生故障的情况下实现不停机的自动切换、对于转台驱动电机的故障如何检测以及如何解决大功率驱动设备对中央控制单元的电磁干扰等问题。而产生电磁干扰的条件有以下几方面[2]:首先是存在电磁干扰源;其次是具备电磁干扰的途径;三是设备自身的敏感度。
随着超短脉冲在激光雷达、光纤通信等领域的应用范围越来越广。这种能够输出大功率窄脉宽电流的驱动源,其出色的性能以及广阔的应用前景引起了各方关注。该二次雷达使用的是一款大功率脉冲驱动源,理论上可以产生纳秒级脉宽及大幅度的脉冲电流。针对这样一款基于高频电路的脉冲驱动源,电磁兼容性的好坏直接决定了设备输出脉冲的质量以及工作稳定性。可以说,解决大功率脉冲驱动源的电磁干扰问题是提高其所驱动的产品的必要前提。
1系统组成及功能设计
1.1系统组成
二次雷达驱动分系统从结构上划分可分为四个组成部分:天线转台及驱动设备、高低波束极化器及控制设备、润滑泵站及润滑油路以及位于室内设备中的配电控制机柜[3]。
天线转台及驱动设备作为室外设备安装在塔顶的天线罩内。润滑泵站安装在天线塔下泵站机房内,为使其油路回油顺畅,泵站应与转台保持一定的高度差。
在配电机柜中,位于机柜顶端的是两套配电分机,为整机提供配电电源,包括为驱动分系统提供两路三相电源、单相电源。
驱动机柜中设置双PLC冗余系统,与控制对象通信方式如图1所示。
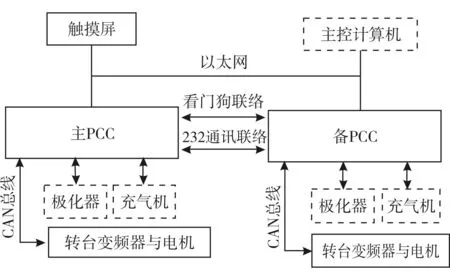
图1 驱动机柜原理框图
1.2天线转台自动切换系统设计
实现天线转台的驱动双电机的自由切换(包括在运行过程中的热切换)是关系到驱动分系统设计成功与否的一个技术关键。须从机械传动结构与驱动控制方式两个方面来考虑。
首先,作为常用的电磁离合器如果在电机热切换的情况下使用,前提是要求两个驱动电机转速在基本一致的情况下,才能启动电磁离合器使电机切换成功。这样就使双驱动电机切换在使用上存在很大的局限性。为此在二次雷达转台驱动上采用了超越离合器来解决这个问题,电磁离合器仅作为备份使用。超越离合器是一种靠主、从动部分的相对运动速度变化或回转的变换能自动结合或脱开的离合器。由于超越离合器自身的棘轮结构,可以实现天线转台的单向运转,从结构上讲,超越离合器的主动轮是通过摩擦力来带动从动轮转动的,当主动轮与从动轮的转速相等时离合器即实现接合。这样,转台双电机的切换就不需要考虑两个电机之间的转速差的问题,可以实现双机之间的任意切换。
其次,在控制设备上采用西门子MMV750/3变频控制器为主要驱动功率器件,由于使用变频控制器可以通过均匀改变电机定子供电频率f的方法,平滑地改变电机的同步转速。解决了异步电动机的软启动与转速可调的问题。以可编程控制器S7-200作为中央处理单元,对变频控制器实施控制与监测,通过串行通讯口对变频控制器的状态进行采集,采集驱动电机电流数据与运行状态信息。当变频控制器或驱动电机发生故障后,S7-200PLC一方面可以向主控报警,另一方面可以立即启动另一路驱动控制单元,实现在天线不停转的情况下的双机切换。
二次雷达的天线转台包括双套传动装置,每套装置均由7.5KW电机、电磁离合器、减速机、回转支承、超越离合器与小齿轮等组成。减速机型号为CWVS10-4165-25,离合器型号为MZ60G,回转支承型号为06.0823.31ZZ10。驱动系统总速比:i =97.18。具体结构如图2所示。
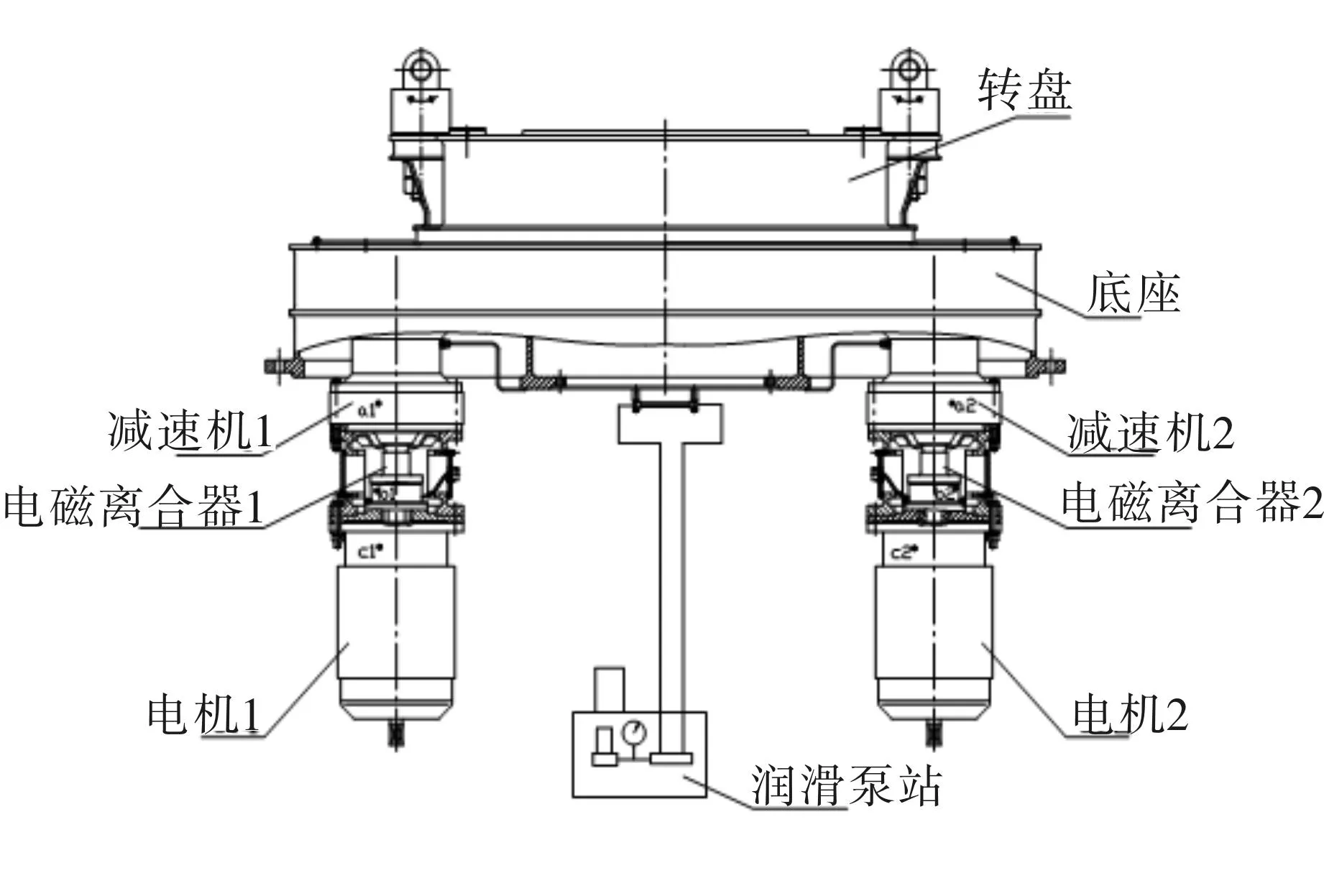
图2 天线转台结构组成
1.3系统控制原理
为实现对转台和泵站、极化器的控制、监控及双机切换等功能,本系统采用以西门子S7-200系列可编程控制器(PLC)为中心处理单元,以西门子MMV750/3系列变频控制器为主包括接触器、继电器、AC/DC电源、行程开关、电源滤波器等的控制单元。图3、图4中分别表示的是PLC 与各控制子系统之间的控制关系。
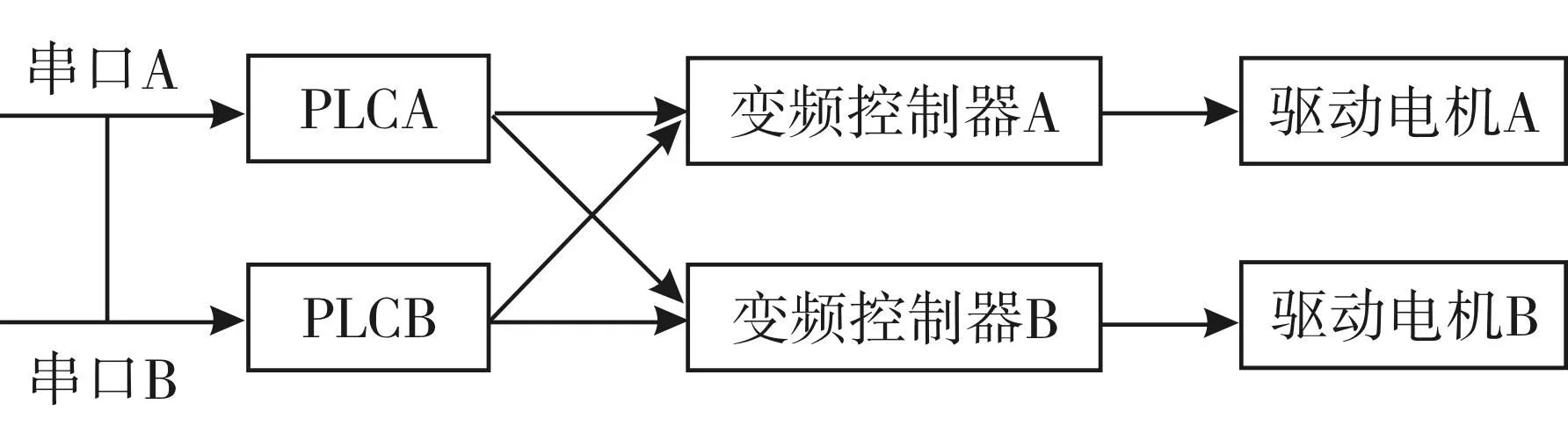
图3 驱动控制子系统控制关系
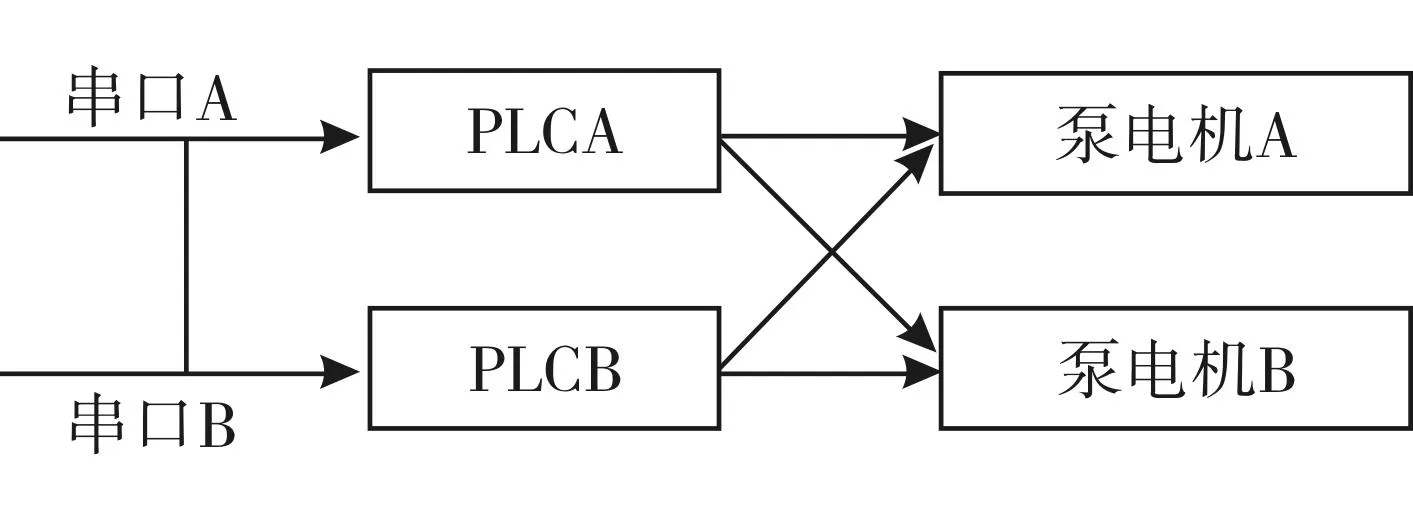
图4 泵站控制子系统控制关系
在上电初始化的过程中,默认PLCA为主控PLC,PLCB为从PLC,由PLCA向主控计算机回馈驱动分系统的状态信息。首先,检测油温传感器的油温信号,判断是否大于-5℃,若小于该温度值,则启动加热器加热泵站润滑油,并向主控报油低温故障。在上电1分钟之后启动泵站电机,泵站工作。泵站为间歇工作制,工作3分钟,停机1小时。在工作过程中,PLC监测压差、压力及液位信号,将工作状态回馈监控。如果泵机A在运行过程中发生故障,则立即启动泵机B,并向主控报泵机故障。在接收到主控发出的开电机指令后,先鸣警铃30秒后,启动驱动电机,电机按设定的加速曲线在指定时间内加速到指定转速。在天线的运转过程中,PLC的模拟量扩展模块采样变频控制器输出的电流或转速模拟量信号,将模拟量信号转换为数字量,对驱动电流、天线转速等控制量进行监控。当一套驱动设备发生故障,PLC检测到变频控制器输出的故障信号后,立即启动另一套驱动设备,利用天线的运转惯性以及超越离合器的特性,在天线不停转的情况下,实现驱动设备的热切换。PLC通过串口读取故障变频控制器的状态信息,将故障信息回馈主控计算机。主控权可以方便地在PLCA与PLCB之间切换,当控制权由PLCA交到PLCB后,PLCB便成为主控PLC,于是所有的控制任务均由PLCB执行。
1.4通讯功能
二次雷达的主控计算机作为主机,各分系统的中央处理单元(PLC、PC104或单片机)作为从机挂在RS485总线上,遵从Modbus 通讯协议与主机进行通信。驱动分系统中的中央处理单元PLCA(地址03)、PLCB(地址13)均作为从机挂在总线上,与主控计算机进行主从通讯。
Modbus协议支持两种帧结构ASCII或RTU模式。在RTU模式信息的每个字节被作为一个8位的二进制码。在ASCII模式信息的每个字节被分成两个半字元,每个半字元被转换成7位的ASCII码字符传送。其结构分别如表1所示。
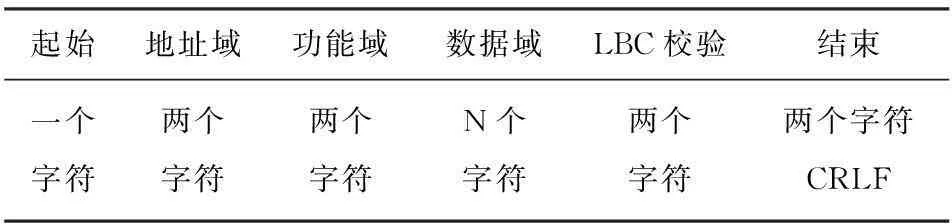
表1 Modbus协议ASCII帧结构
2驱动源电磁干扰解决方案
该二次雷达系统采用大功率窄脉冲宽电流的驱动源电路,电路输出测试设计不够合理,导致波形倒置。核心线路板选择直插式分立元件,整体电路的分布电感大,使得输出波形失真。原电路还采用单稳态触发器,使得整个线路板抗扰能力差,电路板走线更未能考虑高频PCB板的布线原则,过孔数多,根本未能考虑 PCB 基板材料(介电系数 ε、介电损耗tanδ),更没有进行良好的接地设计。输入端虽然采用大功率高速 MOSFET,但由于没有进行很好地处理,使得输出信号失真严重[4]。此外,PCB布线和元件选择不当还带来了低速电路可以忽略不计的复杂干扰。针对以上问题,对该线路板做了以下优化:首先大功率脉冲驱动源由脉冲信号形成模块、脉冲信号放大模块以及高速开关模块构成,脉冲信号形成模块由方波产生器与脉冲整形器构成,二者结合后可以输出具有固定频率、纳秒级脉宽的矩形脉冲[5]。脉冲放大模块则对所形成的窄脉冲整形信号进行功率放大,达到驱动高速开关模块的目的。脉冲形成及放大模块辅以软开关电路与温控模块控制,高速开关模块辅以过流保护电路进行限流。样机包含同步输出端口、脉冲采样输出端口以及脉冲输出端口,其中脉冲输出端口需要外接辅助电路模块以限制其对负载的分流作用[6]。
经过改进后,该驱动系统运行状况良好。
参考文献
[1] 马子健.一种陆基二次雷达监测站布站仿真测算方法[J].现代雷达,2014,36(6):16-18.
[2] 费伟.关于二次雷达电磁环境测试方法的研究[C]//中国通信学会无线及移动通信委员会.2011全国无线及移动通信学术大会论文集.北京: 人民邮电出版社,2011:405-407.
[3] 张尉.二次雷达原理[M].北京:国防工业出版社,2009:31-33.
[4] GILL E,HUANG W M,Walsh J.On The development of a second-order bistatic radar cross section of the ocean surface:A high-frequency result for a finite scattering patch[J].IEEE Journal of Oceanic Engineering,2006,31(4):740-750.
[5] 宗华.双基地高频雷达数据处理NFE技术研究[D].哈尔滨:哈尔滨工业大学,2009.
[6] STUBBERUD S C,KRAMER K A.Data as sociation for multiple sensor types using fuzzy logic[J].IEEE Transactions on Instrumentation & Measurement,2005,55(6):2154-2159.
[责任编辑、校对:东 艳] 第34卷第1期2016年1月西安航空学院学报JournalofXi'anAeronauticalUniversityVol.34No.1Jan.2016
Design of Secondary Radar Drive System
ZHANGQi
(Department of Electrical Engineering,Maanshan Technical College,Maanshan 243031,China)
Abstract:This scheme is designed to solve two key problems in the secondary radar drive system.The application design of the redundant system of the clutch and the dual PLC solves the problem of automatic switching of the antenna in the case of failure.The redesign of circuit also eliminates the electromagnetic interference of high-power driving equipment to central control unit.
Key words:secondary radar;redundancy system;electromagnetic interference;Modbus protocol
中图分类号:TP277
文献标识码:A
文章编号:1008-9233(2016)01-0021-03
作者简介:张奇(1973-),男,安徽六安人,副教授,从事工业控制自动化技术研究。
基金项目:安徽省省级精品资源共享课《工控组态技术》(2014gxk104)
收稿日期:2015-12-19
