摆叶马达伺服系统PID控制与Backstepping控制的比较研究
2016-04-06刘双
刘 双
(江海职业技术学院,扬州 225101)
摆叶马达伺服系统PID控制与Backstepping控制的比较研究
刘 双
(江海职业技术学院,扬州 225101)
摆叶马达伺服系统作为典型的电液伺服系统,在介绍其结构原理及反馈控制模型的基础上,引入系统主要参数,通过对PID控制和Backstepping控制的控制参数设定及仿真,得到负载压降、角速度、轨迹误差的仿真曲线。结果表明,Backstepping控制的瞬态效果和实时伴随效应好于PID控制;PID控制的稳态效果好于Backstepping控制。
摆叶马达 电液伺服系统 PID控制 Backstepping控制
引言
电液伺服系统是由电信号处理装置和液压动力机构组成的反馈控制系统,具有控制精度高、响应速度快、输出功率大、信号处理灵活、易于实现各种参量反馈等诸多优点,在负载质量大又要求响应速度快的场合最为适合。高翔等[1]针对电液伺服系统设计了一个自校正PID控制器,并对其控制特性进行了仿真研究;刘云峰等[2]为实现电液伺服系统不确定性及干扰下的准确跟踪,提出了一种自适应模糊滑模控制的设计方案;晋民杰等[3]设计了一种非线性优化后的PID控制器,对伺服阀控马达系统进行仿真分析。本文以摆叶马达伺服系统这一特定的电液伺服系统为对象,进行PID控制和Backstepping控制的仿真分析及比较研究。
1 摆叶马达伺服系统模型
摆动液压马达又称摆动液压缸,是输出轴作往复摆动的一种液压执行器。按结构形式,它大体可分为叶片式和柱塞式两大类。其中,叶片式摆动液压马达简称摆叶马达。如图1所示,摆叶马达以其结构简单、加工制造相对容易、工作可靠等特点,得到了非常广泛的应用[4]。尤其是摆叶马达伺服系统,因其功率体积比大、响应速度快等优点,在航天航空、汽车、船舶等领域得到了广泛应用[5]。如图2所示,摆叶马达伺服系统通过压差传感器压差、角度编码器旋转角度反馈,在控制器的参数调控下,进行旋转角度下的闭环控制。
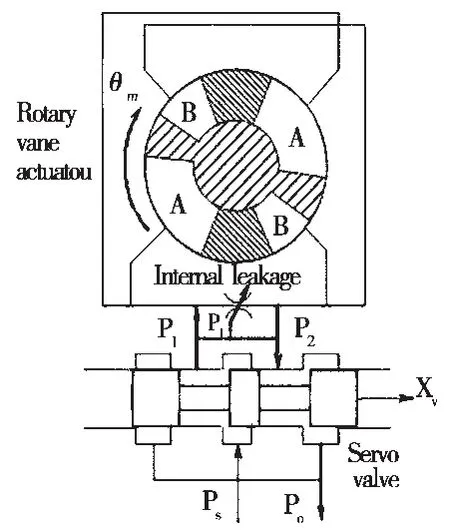
图1 摆叶马达结构原理图
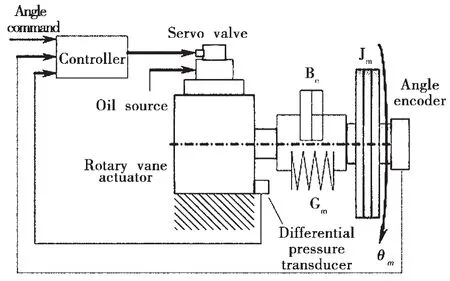
图2 摆叶马达伺服系统结构示意图
2 摆叶马达伺服系统仿真设定
摆叶马达伺服系统的主要参数,如表1所示。

表1 摆叶马达伺服系统主要参数
采用PID控制器进行控制,PID控制参数设定为kp=300,ki=900,kd=1。
采用Backstepping控制器进行控制,依据刘峻等[5]设计的Backstepping控制器,控制参数设定为k1=120,k2=3000,k3=2500。
设定摆叶马达伺服系统的跟踪目标为幅值为10°、频率为1Hz的正弦波。
3 摆叶马达伺服系统控制对比与结果讨论
摆叶马达伺服系统负载压降随时间的变化如图3、4所示。图3是PID控制下负载压降实时波动曲线,图4是Backstepping控制下负载压降实时波动曲线。从图中可以看出,Backstepping控制下的实时伴随效应比较明显,波动幅值在2~4MPa之间,达实际压降值20%;PID控制下负载压降在压降值低至14MPa才出现局域性波动,幅值在0~1MPa之间,占实际压降值8%。整体而言,Backstepping控制比PID控制的灵敏度要高,反馈效果要好;但波动幅值较大,瞬时波动时有异常,稳定性较差。
摆叶马达伺服系统角速度随时间的变化如图5、6所示。图5是PID控制下角速度实时波动曲线,图6是Backstepping控制下角速度实时波动曲线。从图中可以看出,Backstepping控制下的实时波动非常明显,在0位置线处的收敛性不明显。PID控制下的角速度实时波动,当角速度值居于0位置线之上时,其波动幅值趋于收敛;当角速度值居于0位置线之下时,其波动幅值随着角速度值的增大而从收敛态变为震荡态,波动幅值趋于稳定。整体而言,当角速度值为负时,PID控制的控制效果较为理想;但在角速度值为正时,Backstepping控制的控制效果相对较好。
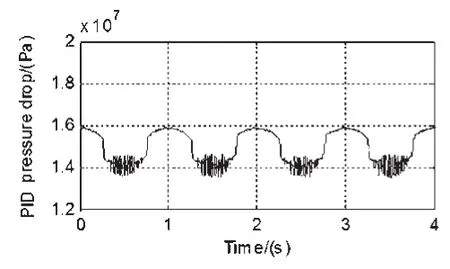
图3 PID控制下压降随时间的变化
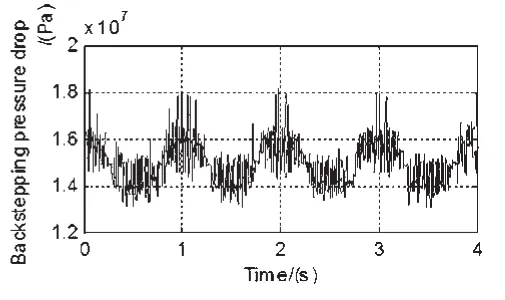
图4 Backstepping控制下压降随时间的变化

图5 PID控制下角速度随时间的变化
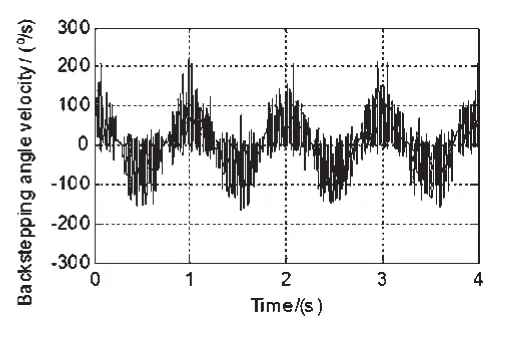
图6 Backstepping控制下角速度随时间的变化
摆叶马达伺服系统控制下的实时轨迹误差如图7、8所示。在PID控制下,总体趋势曲线较为理想,但曲线在谷底位置处的过渡性较差,系统轨迹误差在-0.3°~+0.4°之间,实时波动性不明显。在Backstepping控制下,系统轨迹误差在-0.4°~+0.2°之间,轨迹误差的实时跟随效果较好。
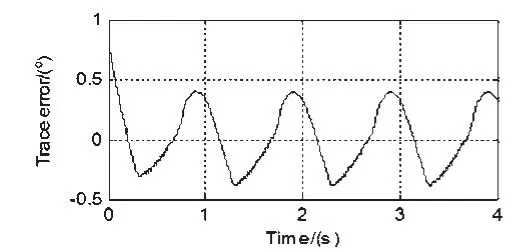
图7 PID控制下随时间变化的轨迹误差
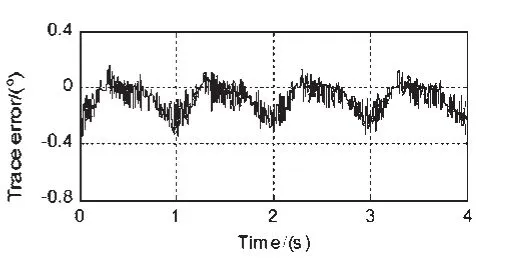
图8 Backstepping控制下随时间变化的轨迹误差
4 结语
总体而言,Backstepping控制的实时反馈效果、瞬时伴随效应都比PID控制要好;PID控制的趋势曲线、负反馈效应、稳态特性要比Backstepping控制理想;Backstepping控制与PID控制相结合的控制模式,在摆叶马达伺服系统控制效果提升上有一定的探讨价值。
[1]高翔,孔丽英,孙贵芳.电液伺服系统的仿真与自校正PID控制器的设计[J].海军工程大学学报,2001,(5):33-37.
[2]刘云峰,缪栋.电液伺服系统的自适应模糊滑模控制研究[J].中国电机工程学报,2006,(14):140-144.
[3]晋民杰,范思岩,范英.伺服阀控马达系统仿真及PID参数优化[J].机械设计与制造,2015,(4):202-205.
[4]李树立,焦宗夏.叶片式摆动液压马达泄漏计算与控制[J].液压与气动,2005,(11):67-68.
[5]刘峻,张剑峰.摆叶马达伺服系统的自适应backstepping控制[J].扬州大学学报:自然科学版,2016,(2):37-40.
The Comparison Between PID Control and Backstepping Control on Servo System of Vane Hydraulic Swing Motor
LIU Shuang
(Jianghai Polytechnic College,Yangzhou 225101)
Servo system of vane hydraulic swing motor as a typical electro-hydraulic servo system, on the basis of introducing structure principle、feedback control model and system main parameters, through the control of the PID control with Backstepping control, got the load voltage, angular velocity, the trajectory error simulation curve. The results showed that the Backstepping control of transient effect and real time accompany the effect was better than PID control, Steady state effect of PID control was better than the Backstepping control.
vane hydraulic swing motor, electro-hydraulic servo system, PID control, backstepping control
