基于CCSv4环境下的单相VSR仿控一体化研究
2016-04-01李伟锋朱金凤朱五军卢英豪
李伟锋 朱金凤 朱五军 卢英豪
(河南中原工学院)
基于CCSv4环境下的单相VSR仿控一体化研究
李伟锋 朱金凤 朱五军 卢英豪
(河南中原工学院)
摘要:针对代码自动生成所需TI公司DSP编程软件CCS3版本对Win7、64位以上版本不兼容问题,本文提出了采用CCS4系统,在最新微软Win10系统下搭建开发环境,并搭建针对部分电路,验证实验的可行性。给出了单相整流控制系统模型,并将优化参数带入仿真中,得到仿真结果,而后将仿真模型转换成控制模型并转化成代码后下载到DSP28335芯片中去,进行硬件实验,实验结果和仿真结果相符。
关键词:CCSv4;单相整流;串级控制;代码生成;锁相环
0引言
CCS(Code Composer Studio)是一个完整的 DSP 集成开发环境,是目前最优秀、最流行的 DSP 开发软件之一[1]。现在 TI 所有的 DSP 都可以使用该软件工具进行开发,大部分用户采用的是CCS3版本,但CCS3对Win7、64位以上版本并不兼容,而CCS4版本能很好地解决这个问题,本文提出了采用CCS4系统,在最新微软Win10系统下搭建开发环境,并搭建针对部分电路,验证实验的可行性。
TI公司的SEED-DEC28335中主要集成了150M系统时钟的DSP、64K×16位的片外SARM、16路片内12 位A/D、12路PWM、2路UART、1路CAN、一路高速USB、片外4通道12位D/A和串行EEPROM+RTC实时时钟等外设[2]。这样能够用在电机、电力电子等工业领域。
本文通过对单相VSR整流器进行建模,并在得到正确模型的基础上,先通过仿真得到好的控制效果,再将仿真模型转换成代码,并通过实验证明方法的可行性。
1 单相整流器的建模
单相电压型PWM整流拓补结构框图[3]如图1所示,其中电网电压为220V/AC,50Hz。经过可调变压器输入,L为整流桥交流侧电感,R为电感的等效电阻,Ua为整流桥交流侧电压,Udc为整流桥直流侧电压,idc是整流桥直流侧总电流,ic、i0分别为流过电容和负载的电流。

图1 单相整流拓补结构框图

其中,Si=1表示开关管导通,Si=0表示开关管关闭,上下开关管的驱动信号在同一时刻是互补的,例如S1为开时S2就为关闭状态,且S1、S4为一组同时导通和关断,S2、S3为一组同时导通和关断。当S1、S4导通时,Ua=-Udc,当S2、S3导通时Ua=-Udc。其中, S=S1—S3利用KVL 和KCL原理得到下式

转化后可得

从式(3)可以看出通过控制Sd和Sq就可控制id和iq。
2 单相整流器的串级控制器设计
根据以上建立的模型,设计如图2所示的串级控制方案。

图2 单相VSR整流器系统串级控制框图
其中,L为整流桥交流侧的电感值,R为电感的等效电阻,C为整流桥直流侧的电容值。由图1可以看出外环电压的调节器的输出作为内环电流调节器的输入。
2.1电流内环的参数设计
电流内环控制结构[4]如图3所示。

图3 电流内环控制框图
其中Ts为电流内环采样周期,电流内环开环的传递函数为
取Kq/Ki=L/R,得到

此时闭环传递函数

按照二阶优化的条件[5],得到:

本系统的R=0.5,L=0.011H,Ts=0.00005,得到优化的Kp=220,Ki=8000,根据离散化公式

转换成DSP离散化的Kp*=220,Ki* =0.0022。
2.2电压外环的参数设计
电压外环的控制框图如图4所示。

图4 电压外环控制框图
由于电流内环的Ts采样周期很短,可以将内环看成一个时间常数很小的惯性环节,通常可以忽略掉其惯性时间常数,从而将其看成一个放大倍数为1的比例环节,再加上采样会有一个惯性环节,可得到外环的模型,其中Tc为电压采样周期。得到电压外环的开环传递函数为

根据三阶优化[6]的设计法对Gu进行参数设计,得到KP=C/2Tc,Ki=C/8(Tc)2
本系统硬件平台的C=0.01F,Tc=0.00005,KP=100,Ki=500000,根据式(8)转换成DSP离散化的KP*=100,Ki*=0.25。
3实时代码生成技术
随着实时代码自动生成技术的研究逐步深入,传统的嵌入式代码编写方式的劣势日益突出。传统代码编写方式工作量巨大,过程繁杂,程序错误隐蔽性强,开发周期长,运行效率低。而实时代码生成技术则克服以上不足,通过模块化、图表化将系统仿真和代码编写同时进行。避免了传统编写方式中反复烧写,反复调试的过程,大大缩短了系统的开发周期,降低了软件开发难度[7]。
3.1 搭建开发环境
首先在主机上安装CCSv4,Microsoft Visual c++ 6.0 和MATLAB2011a这三个软件,然后安装仿真器驱动软件(SEED-XDS510PLUS),在安装完该驱动后,可以在主机的设备管理器栏中看到该仿真器驱动。由于MATLAB需要调用VC++ 6.0的编译器,因此这里还需要安装Microsoft Visual c++ 6.0。
软件安装完毕后,需要对MATLAB的软件接口进行设置,在MATLAB的命令窗口栏,输入 mex -setup指令,编译器选择之前安装好的Microsoft Visual c++ 6.0。至此实时代码生成的开发环境就搭建完成了。
3.2 仿真模型搭建
在MATLAB/Simulink中搭建单相整流器的控制模型,模型结构如图5所示。

图5 仿真控制模型
该仿真模型主要包括交流侧电压检测模块,直流侧电压检测模块,相位检测及坐标变换模块,外环电压控制模块,内环电流控制模块。通过检测整流桥直流侧电压Udc和给定的电压比较,得到的误差信号经过电压外环控制器PI运算后得到电流给定值,通过检测整流桥交流侧流入电感电流ia,经过坐标变换得到id、iq,与电流给定值进行比较,通过PI运算及锁相部分的角度合成后得到控制器的调制波,调制波与三角载波进行比较后得到IGBT的开关信号。这样就达到了控制的目的。
其中基于MATLAB锁相部分的模型如图6所示,其是将相位检测,滤波还有压控震荡结合起来的得到,Va为电网电压相位,Angle为实际输出,为了使输入信号Va与反馈信号Angel相位一致,通过park运算得到鉴相的误差电压,再经过滤波得到控制电压,由控制电压在压控振荡器的作用下得到相位输出信号。
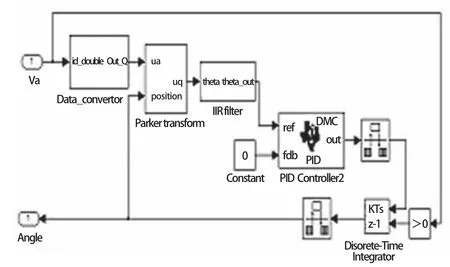
图6 锁相部分模型
3.3 将仿真模型改写为烧写程序
对于仿真模型改写为烧写程序这一过程,只需要保留控制算法代码,对于Simulink中的硬件部分,可以删除,由此可得到可应用于自动代码生成的烧写模型。

图7 烧写模型
3.4仿真结果
直流侧输出仿真结果如图8所示,给定参考电压为37V,输出也保持在37V附近,有一定超调但很小,调节时间不到2s,无稳态误差,由此可见电压输出还是能很好地控制系统,交流侧电流与电网电压输出为图9所示,可见相位控制也能达到系统要求。
4 硬件实验
经过修改得到硬件控制程序,并将程序经过代码生成下载到SEED-DEC28335控制板中,然后用示波器测量交流侧电流和电网电压,得到图形如图10示,可以看出交流侧电流与电网电压能基本上保持同步,电压给定值为37V,当保证系统输出达到37V附近时,其交流侧的电压有效值的可调范围为20~30V,其范围的可调性还是很大的,且电流相位能和电压相位能得到很好的跟踪,与仿真能保持一致。

图8 直流侧电压Ud c输出

图9 电网电压及交流侧电流

图10 交流侧电流和电网电压输出图形
5 结束语
在CCSv4编译环境下使用MATLAB代码自动生成工具(RTW)与SEED-DEC28335控制板相结合实现单相VSR整流器控制,能很好地实现仿真和实际硬件相结合,且相位也能得到有效的跟踪。在保证系统直流侧输出稳定的条件下,输入交流侧的电压调节范围还是比较宽的。这种可视化的编程方法不仅直观可靠、调试起来非常方便、大大缩短了开发软件的周期,并且使开发者对于系统的机理有着更清楚的认识,所以值得在实际生产中推广使用,具有着广阔的应用前景。
参考文献:
[1] 黄文蓓,沈毓磬.关于CCS在DSP平台上的应用和研究[J].电子科技,2013,25(3):90-92.
[2] 北京艾睿合纵科技有限公司. TMS320F28335嵌入式 DSP控制模板硬件使用说明书[M].北京艾睿,2013
[3] 张崇巍,张兴.PWM整流器及其控制[M].北京机械工业出版社,2003,10:23-40
[4]黄辉.单相PWM 整流器控制策略研究[D].武汉:华中科技大学2012.
[5] 许大中,贺益康.电机控制(第二版)[M].杭州:浙江大学出版社,2002.
[6] 胡寿松.自动控制原理(第五版)[M].北京:科学出版社,2007.
[7] 王晓雷,张立功,高旭东,等.基于RTW的单相锁相环控制新方法研究[J].计算机测量与控制,2014,22(9):67-69.
收稿日期:(2015-11-25)
