列控车载设备测速测距雷达标定方法的优化研究
2016-04-01刘佳欣
刘佳欣
(北京全路通信信号研究设计院集团有限公司,北京 100073)
列控车载设备测速测距雷达标定方法的优化研究
刘佳欣
(北京全路通信信号研究设计院集团有限公司,北京 100073)
摘要:重点对车载设备雷达较为复杂繁琐动态标定方法进行优化深入研究,从理论分析到现场试验测试,研究并形成车载测速多普勒雷达静态标定的优化方案。
关键词:测速测距系统;雷达标定;CTCS3-300T车载
Abstract:This paper mainly introduces the complicated dynamic calibration method of ODO system of ATP and studies the improved veri fi cation method of Doppler radar through the theory analysis and fi eld test.
Keywords:radar; calibration; CTCS3-300T; ATP
1 背景
CTCS3-300T列控车载设备测速测距系统包括两个速度传感器和两个多普勒雷达,车载系统通过测速测距系统进行列车运行的安全防护以及列车定位。速度传感器由其工作原理特性决定,伴随所在轮轴的空转或打滑情况的发生,测速容易出现偏差。因此需要雷达进行速度校准。动车组车载设备雷达安装完成后,均需进行标定才能投入运用。传统方法是动态测速调整雷达脉冲输出,该方案在现场实现存在诸多弊端。本文重点讨论另一种静态标定雷达的方式,优化实施过程,提高现场工作效率。
2 雷达原理介绍
雷达内部主要包括以下模块:电源模块、信号处理模块、天线模块、脉冲输出模块、IO输出模块。原理如图1所示。
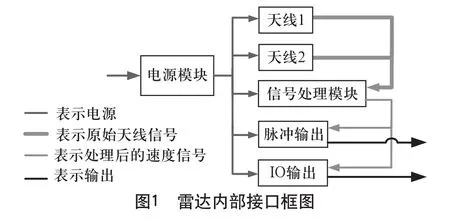
雷达电源模块为其他各模块提供5 V、3.3 V等工作电压,信号处理模块为雷达的核心处理模块,其将采集到的微波信号转化成两种速度信号,一种通过脉冲输出模块输出矩形脉冲速度信号,另一种通过IO输出模块的RS-458协议输出速度信息,雷达内部有两个不同角度的天线,天线通过多普勒效应测速。
多普勒效应即是当微波收发器发生相对位移后,接收到的回波频率与发射频率之间会产生频率差,该频率差即多普勒频移,频移的大小取决于微波收发器相对位移的速度。CTCS3-300T列控车载设备雷达安装在动车组车体底部,平行于底板,左右两侧各安装一个,且雷达照射方向相反,以其中一个雷达天线为例,天线发射角度与铁轨成α°角,则如图2所示。

图2中,h为雷达安装高度,s为运行距离,v为车辆行进方向,则可以得到时间t内的相位角速度为:

则可知:

根据ω=2•π•f得到:

由此可知,雷达测速主要取决于雷达本身的安装高度以及雷达的安装俯仰角度。
3 传统雷达标定方法
测速测距为ATP系统中重要的安全功能,而雷达的测速原理很好的弥补传统霍尔或光电元件在轴端脉冲计数测速中的不足,不受车轮空转、打滑的影响,因此对雷达功能的前期调试至关重要,传统方式是在低速下,以速度传感器速度为参考进行雷达参数的校准,因此在标定雷达前,需确保雷达前后俯仰角度值和向外倾斜角度值在规定的范围内并更新最新的轮径信息,原理如下:

其中,轮径值为速度传感器所在轴的车轮直径,脉冲/圈为速度传感器所在轴的齿盘齿数,N为每公里雷达产生的脉冲数,为固定数值。由此可知,速度传感器的测速精度决定了雷达测速精度。
4 改进型多普勒雷达标定方法
传统测试方法中存在弊端:1)现场实施要求条件严格。为保证速度传感器不发生空转打滑请况,必须保证整个测试过程中,线路为坡度小于5‰的平直轨道,且司机需确保车辆平稳行驶一段时间。2)测试成本巨大。由于雷达标定需要动态进行,每一次的标定需要花费很大的人力物力,优化后的雷达标定方法在静态下即可以完成。
影响多普勒雷达测速的因素包括雷达高度、雷达俯仰角度以及雷达水平倾斜角度。雷达的安装高度和水平倾斜角度在不同车型做出了不同规定,在动车组出厂前会进行相对应的检查,且雷达水平倾斜角度在1°的范围内测速偏差为0.02%,可以忽略不计,因此,改进型多普勒雷达标定系数(真实速度与雷达速度的比值)仅与雷达俯仰角度有关。
4.1理论计算
现定义车辆速度与雷达测速的比值作为静态标定系数C,即:


其中,β为雷达实际安装角度与雷达理论角度间差值,雷达理论角度为45°,代入化简上式得:

根据公式(3)代(5)可知:
则可以得到标定后系统雷达脉冲值:

4.2改进型多普勒雷达标定方案
标定前提条件:
1)根据测量速度传感器所对应车轮轮径值并且修改系统中的相应参数;
2)轨道以及车辆应保持平行,车辆转向架之间不得有碰撞或倾角变化;
3)用于测量的多普勒雷达表面必须保持清洁;
4)多普勒雷达下方的轨道表面必须保持清洁。
标定具体步骤:
1)数字角度测量仪设置为绝对零度,这是后续测量的准确性保障前提,该步骤根据不同产品操作不同;
2)将数字角度测量仪紧贴雷达下表面测量多普勒雷达倾斜角,如多普勒雷达前部低于后部,则该倾斜角为正,反之为负;
3)重复上述步骤至少3次;
4)如果3次测量结果最大偏差大于0.04°,则该3次结果无效;继续测量直到3次,测量结果之间最大偏差小于或等于0.04°;
5)计算3次测量的平均值,结果记为βradar;
6)将数字角度测量仪紧贴铁轨表面测量轨道倾斜角,如轨道前部低于后部,则该倾斜角为正,反之为负;
7)重复步骤3)、4),计算3次测量的平均值,结果记为βrail;
8)如果|βradar-βrail|大于1°,应调整多普勒雷达的安装,然后重新进行上述测量;
9)如果|βradar-βrail|不大于1°,则根据公式(8)正确的雷达脉冲应为:

按照上述测量情况,更新ATP系统内两雷达相应参数。
4.3改进型雷达标定法的现场验证
现场通过改进型多普勒雷达标定方法进行雷达标定,并与传统标定方法进行比对,其中:

具体数据如表1、2、3所示。
地点:广州,长春,北京

表1 广州数据表

表2 长春数据表

表3 北京数据表
通过上述数据可以看出两种标定方法的偏差率均小于2%,绝大多数集中在1%左右,且上述车辆在动态测试中,ATP测速与车辆HMI显示速度、GPS显示速度均进行分段多次比对,测速偏差也均小于2%,因此能够初步证明,改进型标定方法得出的雷达脉冲数值的可用性较高,综合考虑下更适合现有条件下的雷达标定工作。
5 结语
改进后的多普勒雷达标定方法较传统标定方法相比,有着操作便捷,计算简单的优势,且通过现场测试验证该方法计算的数据可用性高,如现场大范围推广运用,将节约大量人力、时间以及运营成本,提高CTCS3-300T车载系统的可维护性。
参考文献
[1]铁运[2012]211号.CTCS-3级列控车载设备技术规范(暂行)[S].
收稿日期:(2015-11-13)
DOI:10.3969/j.issn.1673-4440.2016.01.003
