基于核稀疏编码的红外目标识别方法
2016-03-28杨春伟王仕成廖守亿刘华平
杨春伟,王仕成,廖守亿,刘华平
基于核稀疏编码的红外目标识别方法
杨春伟1,2,王仕成1,廖守亿1,刘华平2
(1.第二炮兵工程大学精确制导仿真技术实验室,陕西 西安 710025;2.清华大学计算机科学与技术系,北京 100084)
针对红外目标识别问题,提出了一种基于协方差描述子和核稀疏编码的红外目标识别方法。该方法结合了红外图像的灰度、一阶以及二阶梯度等特征的协方差描述子作为红外目标的特征,并采用Log-Euclidean度量进行特征相似性计算,通过高斯核函数将协方差描述子映射到高维空间,最后在新的特征空间上进行稀疏编码。实测数据实验结果表明,与传统的KNN(k-nearest neighbor,k最近邻)以及SVM(support vector machine,支持向量机)等分类算法相比,基于核稀疏编码的红外识别方法在识别准确率上有很大的提高。
协方差描述子;核稀疏编码;红外目标识别
0 引言
作为图像处理领域的一个热门研究课题,目标识别在军事运动目标的识别与跟踪、交通检测以及人脸识别等方面有着广泛的应用。而随着红外成像技术的发展,红外目标识别技术在军事领域受到了越来越多的关注。红外目标识别算法主要包括4个阶段:红外目标检测、背景杂波抑制、红外目标的特征提取以及目标的分类识别。由于前2个阶段的研究已经比较成熟[1-2],本文对红外目标的特征提取及分类识别进行研究。特征提取主要是提取目标的边缘、形状以及纹理等显著性特征,而分类识别则指选取合适的分类器对目标的特征进行分类。
文献[3]提出了一种基于目标红外特征与SIFT(scale-invariant feature transform)特征相结合的红外图像识别算法,首先通过红外目标初步信息实现初步识别,然后采用SIFT算法进行精确识别。文献[4]采用SURF(speeded up robust features)算法对地面背景下的红外目标进行识别,通过自适应中值滤波器和小波分频与直方图均衡的图像增强算法对图像进行预处理,然后采用SURF特征提取匹配的方法进行红外目标识别。文献[5]针对电厂冷凝塔等具有建筑规范的特殊建筑物,对自动目标捕获方案中模板匹配的相似性测度计算方法进行了研究,提出了基于梯度矢量相关系数的计算方法。文献[6]针对实战中红外成像制导导弹面临的自动目标识别问题,将支持向量机作为分类器,提出了一种利用二维图像识别三维目标的自动目标识别方法。
最近几年,稀疏表示在模式识别以及计算机视觉领域受到了越来越多的关注。文献[7]将稀疏表示应用于分类问题,提出了一种基于稀疏表示的人脸识别算法,通过训练样本的线性组合来表示测试样本,通过求解稀疏表示问题得到测试样本的稀疏表示系数,而测试样本的分类识别结果则由测试样本本身与重建结果之间的残差决定。文献[8]将稀疏表示和压缩感知理论应用于红外目标识别领域,提出了一种新的红外目标自动识别框架,将红外目标识别问题转化为稀疏编码问题进行求解,取得了良好的识别结果。而我们知道,通过一个合适的非线性映射核函数将特征映射到高维空间,训练样本可以更加准确地通过测试样本的线性组合表示。也就是说,核稀疏编码可以更加准确地表示测试样本,具有更好的区分性。另一方面,特征选择在目标检测以及分类识别中起着十分关键的作用,而协方差描述子[9](covariance descriptor, CovD)以其优良的特性被广泛应用于纹理鉴别、目标检测、目标跟踪以及视觉显著性提取等方面[10-12]。
采用协方差描述子,提出基于核稀疏编码的红外目标识别方法。协方差描述子结合了红外图像的灰度以及一阶二阶梯度信息,通过Log-Euclidean度量计算协方差描述子之间的相似性,由高斯核函数将协方差描述子映射到高维空间,通过核稀疏编码将目标识别问题转化为稀疏系数求解问题,通过残差最小化对目标进行分类识别。
1 方法综述
图1为基于核稀疏编码的红外目标识别总体流程。首先提取红外目标的协方差描述子,而由于协方差描述子不属于欧式空间,无法采用欧氏距离计算不同目标之间协方差描述子的相似性,本文采用Log-Euclidean度量进行计算;之后通过高斯核函数将其映射到高维空间,采用核稀疏编码将目标识别问题转化为稀疏系数求解问题;最后,基于核稀疏编码得到的稀疏系数,根据重建误差对红外目标进行分类识别,残差最小值对应的类别即为目标所属类别。
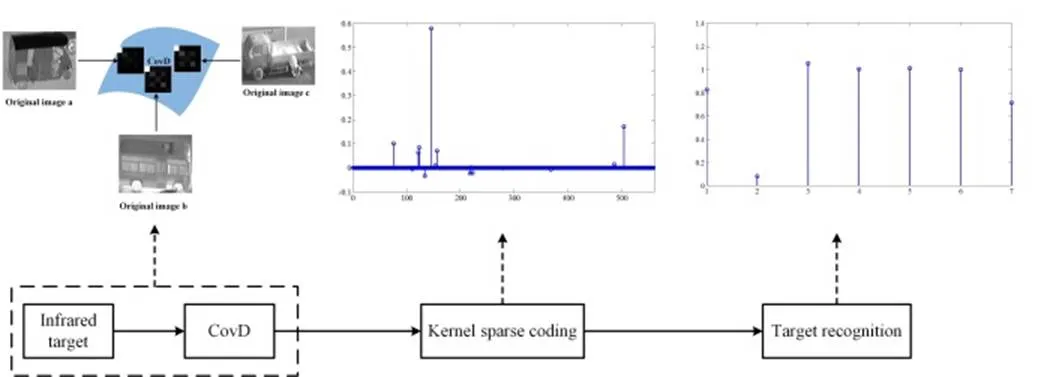
图1 红外目标识别流程
1.1 协方差描述子
2006年,Tuzel等人提出了协方差描述子,具体来说,令{f}=1,…为表征图像的灰度值、梯度、边缘、空间属性等的维特征向量,其中为图像像元数量。那么,×维的协方差描述子定义为:

式中:为特征向量的平均值。
协方差描述子与其他特征相比具有以下优点:首先,图像的协方差描述子能够表征图像不同视角的特征;第二,协方差描述子能够融合不同特征,其对角线元素表征了特征之间的变化,非对角元素表征了特征之间的相关性;第三,与其他特征相比,协方差描述子维数较低,由于对称性,仅有(2+)/2个值;另外,协方差描述子可以通过积分图像表示进行快速运算。
然而,协方差描述子为对称正定矩阵,并不属于欧式空间,而是位于图2所示的黎曼流形中。因此,我们不能用欧式距离来衡量协方差描述子之间的差异。为了克服这个问题,采用Log-Euclidean度量[13]来近似协方差描述子之间的差异:

式中:logm表示对矩阵求对数。
1.2 核稀疏编码

由于测试样本标签未知,因此通过所有训练样本的线性组合表示,即:
=(4)
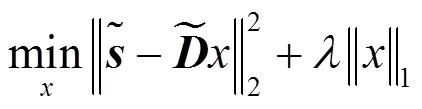
稀疏编码解决如下的优化问题:
公式的第1部分表示重建误差,第2部分用来调节系数的稀疏度。
然而,现有的线性假设在许多应用中并不总是有效的。文献[14]指出可以通过核映射函数将原始特征映射到高维特征空间后再进行稀疏编码,这样在原始空间中不能线性可分的样本在高维空间变得线性可分,而在原始空间中线性可分的样本在高维空间中能够更加准确的线性可分。令训练样本Î,其中为特征所属的原始空间,如果通过一个合适的核映射函数将映射到高维空间,那么将具有更好的线性表示特性。因此,令®为原始空间到高维空间(可能是无限维)的映射关系,如图3。
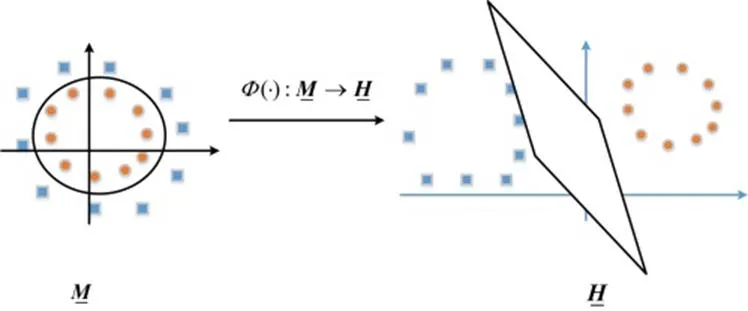
图3 原始特征空间到高维空间的映射
令()=[(1),…,(d)],对于待识别红外目标,可以通过所属类别的训练样本的线性组合来表示。因此,式(3)的优化问题可转化为:

重建误差可表示为:
Trace{[()-()]T-[()-()]}=
Trace{(,)-2T(,)-T(,)} (7)
式中:(,)=[(,1),(,2),…(,d)]T,(,)=()T×(),而(,)为第(,)个元素为(d,j)的×方阵。
1.3 红外目标识别流程
接下来给出基于核稀疏编码的红外目标识别的计算过程:
Step 1:协方差描述子计算。对于每个红外目标,根据式(6)计算红外目标的灰度以及一阶二阶梯度信息:
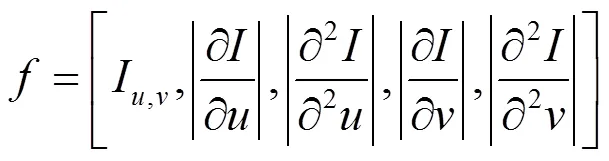
式中:(,)为图像像素,为灰度值。根据式(1)计算红外目标对应的5×5协方差描述子。
Step 2:通过Log-Euclidean度量计算协方差描述子1和2的距离。
Step 3:采用高斯核计算核。由于高斯核体现出的优良特性,我们采用式(7)进行核计算:
(1,2)=exp[-×(1,2)2] (9)
式中:为衰减因子。
图4所示为核计算过程。第1行为从原始红外图像提取的目标,其中第2和第3个为同类目标;第2行为Step 1中红外目标对应的协方差描述子;第3行为Step 2计算得到的距离;第4行为Step 3中的高斯核值。不难看出,核值越大,二者为同一类目标的可能性越大。
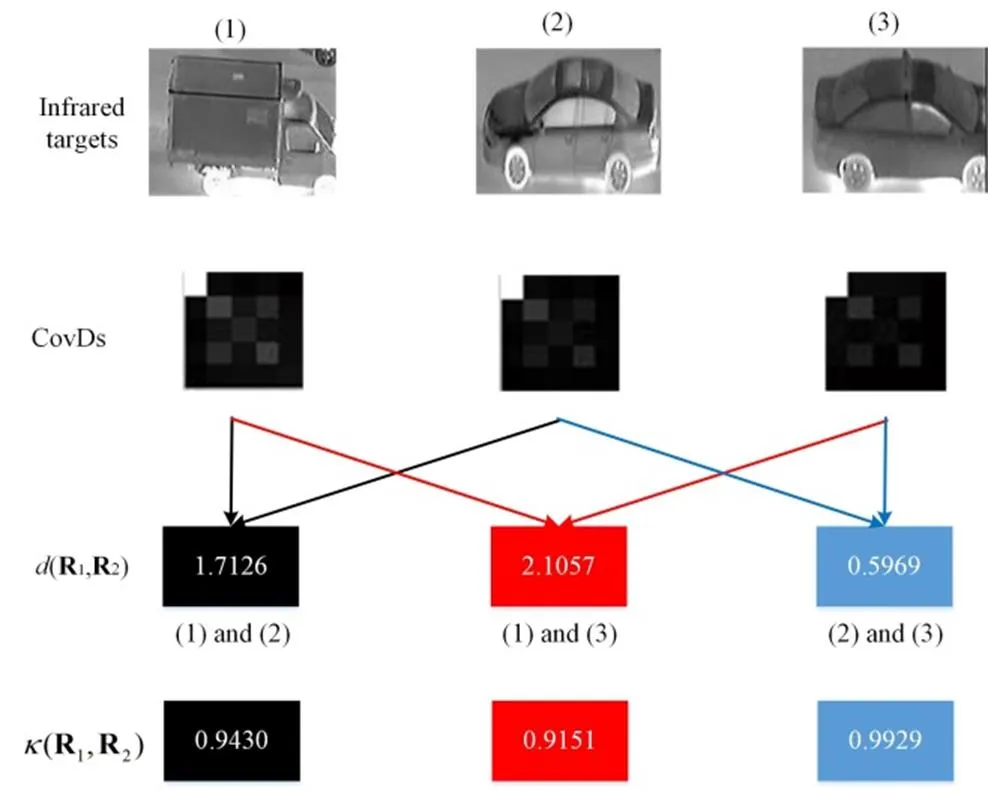
图4 核计算过程
Step 4:通过SLEP或SPAMS工具箱进行优化计算。式(5)可转化为:
式中:
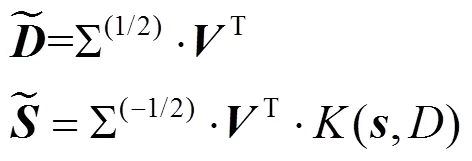
式中:ST为对称正定矩阵(,)的奇异值分解。这样上述优化问题就可以采用SLEP或者SPAMS等稀疏矩阵求解工具箱求解。
Step 5:通过重建残差进行红外目标分类识别。求得稀疏系数后,待识别红外目标的残差为:
r=-2(,D)+T(D,D)(12)
式中:是第类目标的训练样本。残差最小值对应的类别即为待测试红外目标所属分类,即:
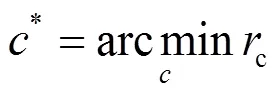
2 实验结果分析
我们采用红外热像仪拍摄的真实红外车辆目标对文中所提算法进行测试。通过感兴趣区域提取,将红外车辆从原始红外图像中提取出来,共计7类红外车辆目标,每类包含100个样本。图5所示为示例目标图像,所有目标均转化为160×128。将每类100个样本任意分为5组,其中4组用来训练,1组用来测试,并循环进行5次实验。
固定训练样本数量,对核参数和稀疏参数进行调试。当=0.08,=0.001时,识别准确率最高。
图6为采用Matlab编写的红外目标识别软件。左侧为样本示例。右上方所示对第一组140个测试样本进行分类识别,准确率为96.4286%。右下方所示为针对任一测试样本,计算对应的协方差描述子,稀疏系数以及残差。根据残差可得,第5类所对应的残差最小,因此,测试样本的识别结果为厢式货车(左侧标红)。
我们采用KNN[15]以及SVM[16]作为基准算法,针对5组测试样本,比较3种算法的准确率。表1所示为3种算法的识别准确率,本文方法与KNN以及SVM算法相比,识别率平均分别高出约15%和4%。
图7(a)~(c)所示分别为为KNN、SVM和本文方法针对实验数据的平均混淆矩阵,本文方法针对各类目标的分类识别准确率均高于KNN以及SVM算法。
3 结论
本文针对红外目标识别问题,提出了一种基于核稀疏编码的识别方法,该方法将红外目标识别问题转化为稀疏表示问题,采用5×5的协方差描述子作为红外目标特征,通过Log-Euclidean度量进行相似性计算,通过核稀疏编码在高维空间对目标特征进行分类识别。通过对实测数据的试验表明该方法体现出了良好的识别性能。
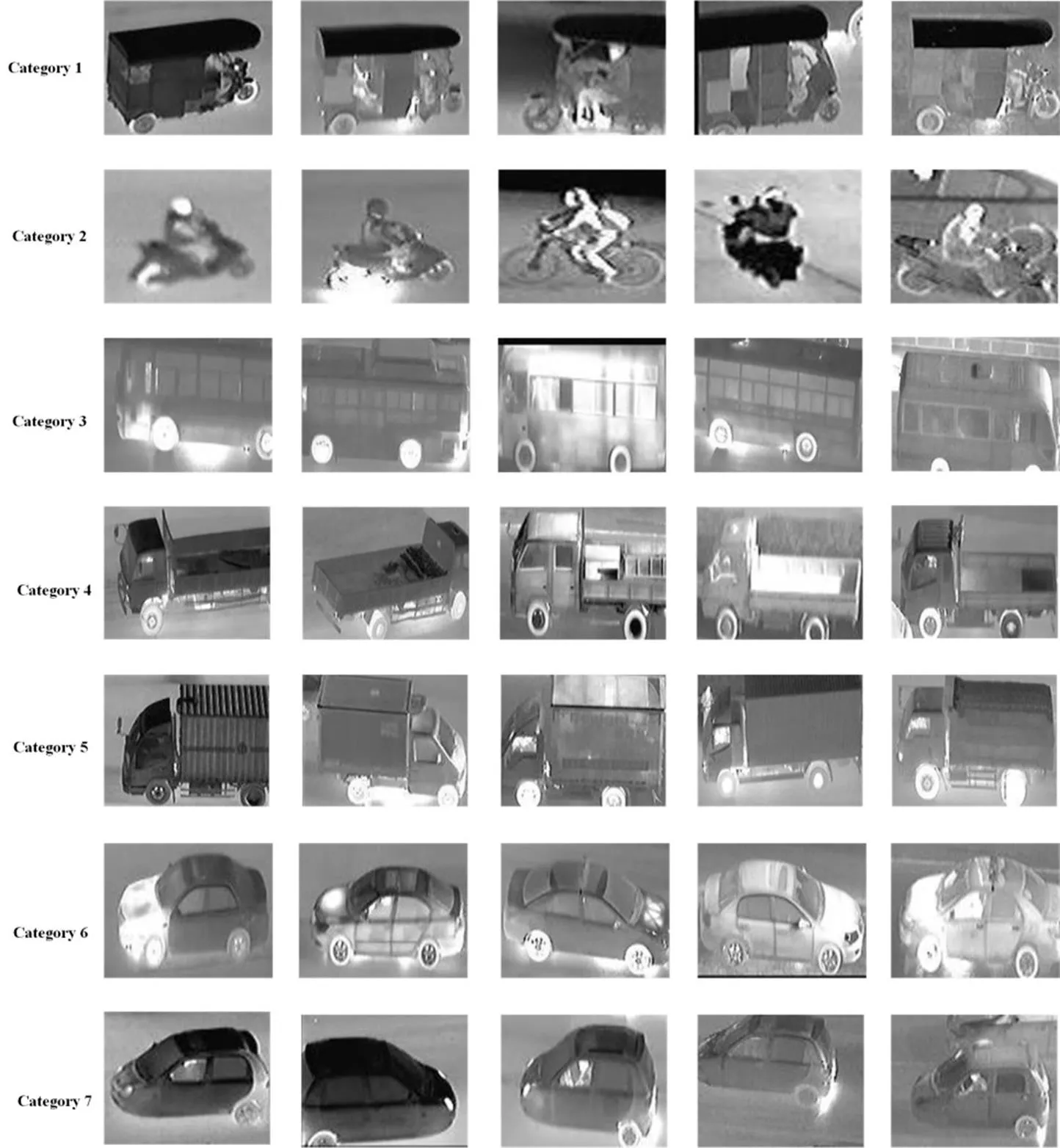
图5 红外车辆目标示例
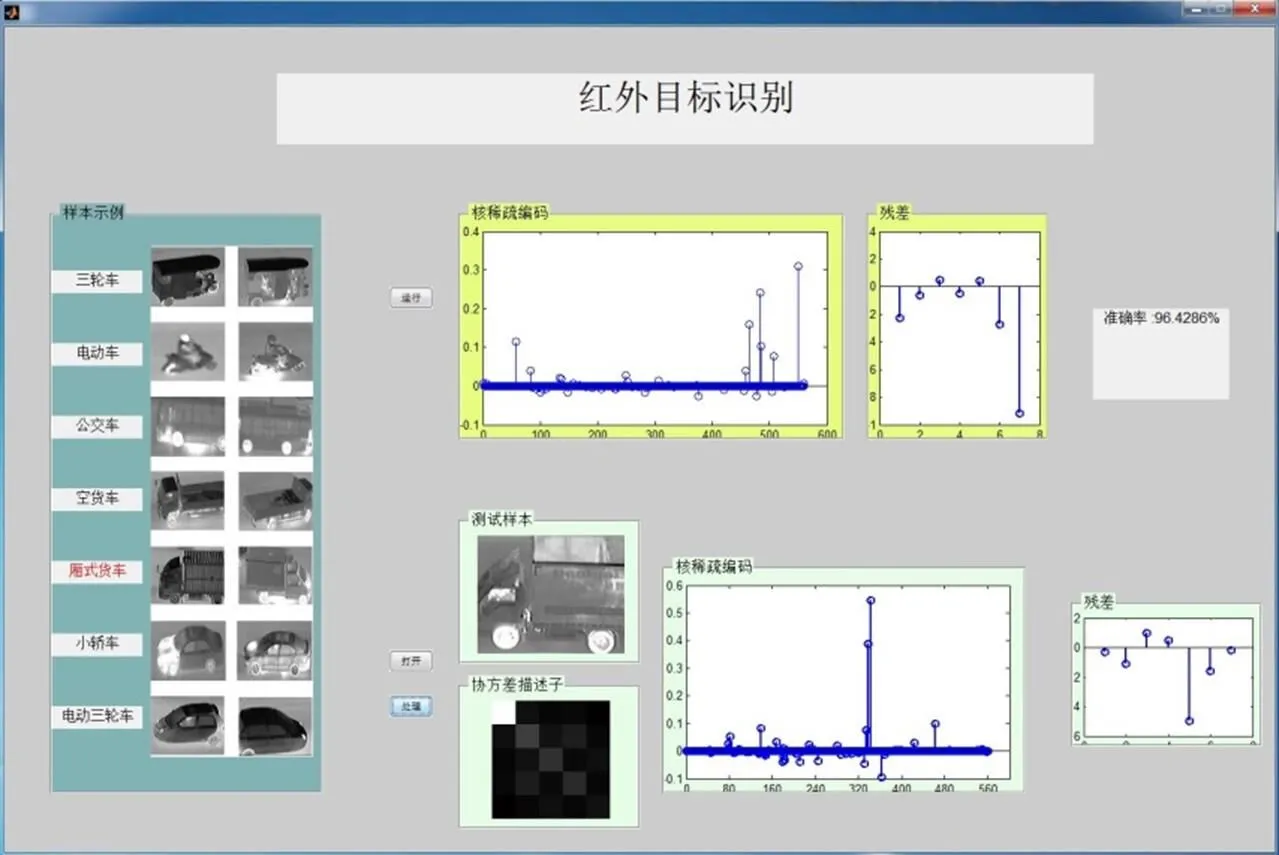
图6 红外目标识别软件
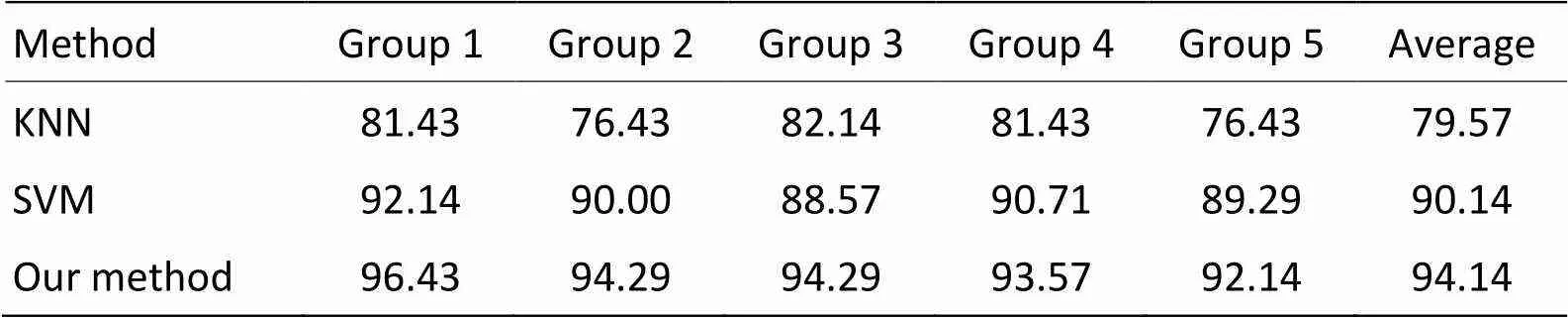
表1 3种分类算法识别准确率比较
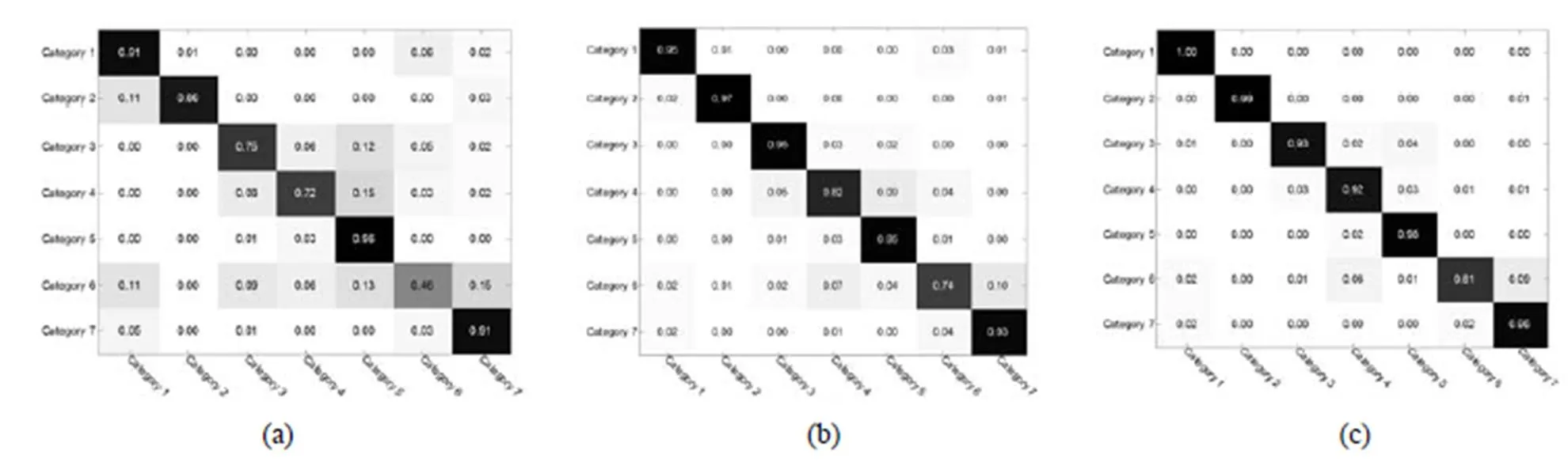
图7 3种分类算法的混淆矩阵
[1] Yang Chunwei, Liu Huaping, Liao Shouyi, et al. Small target detection in infrared video sequence using robust dictionary learning[J]., 2015, 68: 1-9.
[2] Gong Jinnan, Zhang Yin, Hou Qingyu, et al. Background suppression for cloud clutter using temporal difference projection[J]., 2014, 64: 66-72.
[3] 王世亮, 杨帆, 张志伟, 等. 基于目标红外特性与SIFT特征相结合的目标识别算法[J]. 红外技术, 2012, 34(9): 503-507.
WANG Shi-liang, YANG Fan, ZHANG Zhi-wei, et al. A target recognition method based on infrared features and SIFT[J]., 2012, 34(9): 503-507.
[4] 朱长军, 王民钢, 王超, 等. 地面背景下基于SURF的红外目标识别方法[J]. 红外技术, 2013, 35(9): 551-554.
ZHU Chang-jun, WANG Min-gang, WANG Chao, et al. Infrared target recognition method based on SURF in ground background[J]., 2013, 35(9): 551-554.
[5] 明德烈, 田金文. 红外前视对一类特殊建筑物目标识别技术研究[J]. 宇航学报, 2010, 31(4): 1190-1194.
MING Delie, TIAN Jinwen. Automatic infrared condensing tower target recognition using gradient vector features[J]., 2010, 31(4): 1190-1194.
[6] 范彬, 冯云松. 支持向量机在红外成像自动目标识别中的应用[J]. 红外技术, 2007, 29(1): 38-41.
FAN Bin, FENG Yun-Song. The application of the support vector machine in infrared imaging automatic target recognition[J]., 2007, 29(1): 38-41.
[7] Wright John, Yang Allen Y, Ganesh Arvind, et al. Robust face recognition via sparse representation[J]., 2009, 31(2): 210-227.
[8] Patel Vishal M, Nasrabadi Nasser M, Chellappa Rama. Sparsity-motivated automatic target recognition[J]., 2011, 50(10): 1425-1433.
[9] Tuzel Oncel, Porikli Fatih, Meer Peter. Region covariance: a fast descript- or for detection and classification[C]//, 2006.
[10] Tuzel Oncel, Porikli Fatih, Meer Peter. Pedestrian detection via classific- ation on riemannian manifolds[J]., 2008, 30(10): 1713-1727.
[11] Porikli Fatih, Tuzel Oncel, Meer Peter. Covariance tracking using model update based on lie algebra[C]//, 2006: 728-735.
[12] Erdem Erkut, Erdem Aykut. Visual saliency estimation by nonlinearly integrating features using region covariances[J]., 2013, 13(4): 1-20.
[13] Li Peihua, Wang Qilong, Zuo Wangmeng, et al. Log-Euclidean kernels for sparse representation and dictionary learning[C]//, 2013: 1601-1608.
[14] Gao Shenghua, Tsang Ivor Wai-Hung, Chia Liang-Tien. Sparse representation with kernels[J]., 2013, 22(2): 423-434.
[15] Hastie Trevor, Tibshirani Robert. Discriminant adaptive nearest neighbor classification[J]., 1996, 18(6): 607-616.
[16] Cortes Corinna, Vapnik Vladimir. Support-vector networks[J]., 1995, 20(13): 273-297.
An Infrared Target Recognition Method Based on Kernel Sparse Coding
YANG Chunwei1,2,WANG Shicheng1,LIAO Shouyi1,LIU Huaping2
(1.,’710025,; 2.,,100084,)
An infrared target recognition method based on covariance descriptor and kernel sparse coding is proposed in this paper. Covariance descriptor combining infrared image gray intensity values and the norm of first and second order derivatives of the intensities as infrared image features. With respect toandis extracted as feature representation, similarity of covariance descriptors is computed through Log-Euclidean metric. Then covariance descriptors are mapped into a high dimensional feature space through Gaussian kernel function. Finally, infrared target recognition is accomplished using sparse coding in the new feature space. Experiments on the real infrared images show that our method obtains better results compared with traditional algorithms such as KNN and SVM.
covariance descriptor,kernel sparse coding,infrared target recognition
TP391
A
1001-8891(2016)03-0230-06
2015-09-07;
2015-10-08.
杨春伟(1986-),男,山东高密人,博士研究生,研究方向为红外目标的检测与识别。E-mail:yangchunwei081129@163.com。
