一种光机扫描机构的设计
2016-03-28曹德华
曹德华
一种光机扫描机构的设计
曹德华
(中国电子科技集团公司第50研究所,上海 200331)
光机扫描机构是各种航天航空遥感扫描成像系统的重要组成部分,而扫描镜及转动轴系又是其关键因素。从实际工程应用出发,着重论述一种大尺寸扫描镜的制备工艺以及光机扫描机构转动轴系的设计及校核方案,提出了一种45°平面反射镜扫描机构的关键实现技术和解决方案,经检验该方案切实可行。
光机扫描机构;扫描镜制备;轴系设计
0 引言
光机扫描机构是各种航天航空遥感扫描成像系统的重要组成部分,扫描驱动装置驱动扫描镜实现对目标的扫描成像,以获取目标信息[1]。光机扫描机构为扩大探测视场、增加空间分辨率,往往采用二维扫描摆镜绕两轴摆动实现大的扫描视场。目前常用的光机扫描方式有:旋转(摆动)的45°平面反射镜扫描、旋转(摆动)的单(双)面镜扫描、望远镜整体扫描等。在这些方法中,45°镜具有扫描镜尺寸小、可观测冷空间作辐射定标基准的优点,在航天遥感仪器中应用较多[2]。本文将从实际工程应用出发,着重论述一种45°平面反射镜扫描的关键实现技术和解决方案。
1 整体设计
采用2个步进电机分别驱动扫描镜在水平及垂直方向来回摆动,实现二维扫描。电机控制单元向电机驱动器发出步进信号及方向信号,由驱动器直接驱动步进电机运动。安装在扫描镜上的位置传感器,实时获取扫描镜摆动的位置信息,为扫描镜2个维度的位置校准提供依据。扫描机构结构框图如图1所示。

图1 扫描机构结构框图
扫描镜为类椭圆型平面镜,镜面与系统光轴夹角为45°,步进电机直接驱动扫描镜实现来回摆扫。扫描镜绕其自身短轴摆动实现垂直方向的连续扫描,步进电机驱动扫描镜沿系统光轴摆动,实现水平方向的步进。
为使镜面相对于光路只有方位角度的不同而没有额外的平移运动,将二维转轴都穿过镜面是最理想的状态。但这样必然要使用一个比镜面长轴还长的外框架,或者至少要使用一个比镜面长轴的一半要大的U形架,如此必然将使整个扫描系统显得庞大而不够紧凑。
为此,扫描系统不采用转轴穿过镜面的方案,而是把两维轴系置于扫描镜后面。这样可以避免使用庞大的外框或U形架,使整个轴系紧凑地装配在一起,不仅能够减小体积和重量,而且紧凑的布局对于提高轴系刚度和精度都是有利的。(转轴偏置于扫描镜背面,会造成扫描图像存在一定的变形,而扫描镜厚度仅为10mm,转轴相对于扫描镜偏移的距离很小且为固定值,由此造成的变形完全可以在后期进行图像数据处理时消除。)同时,整个二维轴系与扫描镜是相对独立的,二维轴系可以看作是一个单独的平台,待二维轴系装配完成后,再将扫描镜装上即可。
对扫描系统轴系进行设计时,需要考虑以下因素:
1)刚度要求。首先支撑框架承担着支撑安装于其上的部件并连接到转轴的作用,因此应确保俯仰、回转2个轴系的支撑框架具有足够的刚度,可以支撑起并带动整个扫描镜进行运动而不发生变形或颤动;其次2个轴系的转轴一方面需要支撑包括框架在内的所有轴上零部件,另一方面需要将电机产生的转矩传递到支撑框架上,带动扫描镜实现给定的运动。因此转轴也必须具有足够的抗弯和抗扭刚度,以确保整个扫描运动的平稳和精确,实现扫描精度要求。
2)精度要求。本文设计的二维扫描系统,具有很高的扫描精度要求。这就对扫描系统中各零部件的提出了很高的加工和装配精度要求。如两维转轴与镜面的平行度、两维轴之间的垂直度,以及轴与轴承之间的安装间隙等,都需要通过在加工和装配过程中采取相应的措施,将这些尺寸控制在合理的偏差范围之内。此外,整个系统的扫描精度还与控制系统和整个轴系的刚度有关,这些因素也需要后期通过计算机仿真或物理样机的试验加以分析和验证。
2 扫描镜的设计
目前常见的扫描镜制备方法为采用SiC基体材料进行机械加工后得到[3],这种方法的缺点在于:国内的SiC材料比较欠缺、扫描镜质量较重、基体的机械加工周期较长、加工成本较高[4]。而本系统要求制备的扫描镜为长轴520mm、短轴380mm的椭圆扫描镜,尺寸相对较大。因此,本文将探讨另外一种扫描镜的制备方案:将镜面铝板做两底面,直接在中间浇注泡沫。该方案具有成本低、质量轻、易加工、易修改等优点。
金属铝是制造光学反射镜的传统材料,现在有数以百计的反射镜都是由金属铝制造的。拟采用的镜面铝板更具备以下特点:价格稳定,节约成本,反射率极高,节约能源,质地轻巧,易于成型,表面坚硬,不易刮伤,可直接加工,无需预处理。具体参数如表1。

表1 铝材参数
在2块铝板中加采用泡沫材料作为夹心层,以起到增强刚度同时减轻重量的效果。经过查找资料对比,选出两种较为合适的夹心层泡沫塑料:聚甲基丙烯酰亚胺(PMI)和聚氨基甲酸酯(PU)。
PMI泡沫塑料呈白色到金黄色,平均泡孔尺寸在0.5~1.0mm(随密度减小而增大)。其泡孔为多面体闭孔结构,闭孔率接近100%。PMI泡沫塑料的密度为30~110kg/m3,在此范围内可按需要制备相应密度。
PMI泡沫加工成型非常方便,可以采用木材切割工具进行切割和修刨,并且也可将PMI泡沫热成型制得复杂形状满足复杂工件对泡沫形状的要求。同时,PMI有非常优异的耐溶剂性能。在所有的泡沫中,相同密度条件下对比,PMI泡沫的强度和刚度最高。因此,在泡沫夹心层结构复合材料的重量设计及优化和制造方面,PMI泡沫有明显的优势。

表2 PMI泡沫塑料的力学性能表
聚氨基甲酸酯又称PU,是由多异氰酸酯与聚醚型或聚醋型多元醇在一定比例下反应的产物。PU可以分为弹性体和泡沫塑料两大类。PU泡沫塑料为PU最主要的品种,约占整个PU的一半以上。聚氨酯硬泡多为闭孔结构,具有绝热效果好、重量轻、比强度大、施工方便等优良特性,同时还具有隔音、防震、电绝缘、耐热、耐寒、耐溶剂等特点。根据要求的配方的不同,聚氨酯模型型材的密度可以在40~900kg/m3之间任意调整。轻型聚氨酯夹芯板参数如表3。

表3 轻型聚氨酯夹芯板参数
经分析,2种夹心材料的性能均可以满足要求,其中PMI材料的生产厂家极少且供货周期不能保证、供货板材厚度也不能根据需要调整。PU材料的生产厂家较多,可采用将镜面铝板做两底面,直接浇注PU泡沫的加工成型方法。
经计算,长轴520mm、短轴380mm的椭圆扫描镜,由2块厚度为1mm的铝板与厚度为8mm PU泡沫塑料粘合后的总质量约为1000g,较之传统的加工手法既缩短了加工周期,也大大减轻了镜体的质量,减轻了电机和轴的负载。
3 轴系的设计
轴承的摩擦力矩是电机选型过程中需要重点考虑的部分。轴承的总摩擦力矩主要由0和1两部分组成, 其中0主要是在高速轻载的场合起作用,本系统中扫描镜的转速较慢,这一部分可以不作考虑。而1主要是弹性滞后和接触表面的摩擦损耗,可由下式[5]计算:
1=11m(1)
式中:1为摩擦系数;1为轴系静载荷;m为轴承平均直径。
3.1 俯仰轴系计算
俯仰轴系中轴所承担的质量合计约为1200g,俯仰轴系采用一个深沟球轴承和一个角接触球轴承,查得其摩擦系数1为0.004。俯仰轴系的重力=11.76N,m=0.5(+)=12mm。故单个轴承的摩擦力矩为:
M1=0.004×5.88×0.012=0.00028224N·m=
0.28224mN·m
整个俯仰轴系的摩擦力矩为:
=2×1=0.56448mN·m
俯仰轴系电机转速要求为双向60r/min,带动俯仰轴系转动所需的最小力矩为0.56448mN·m,计算出轴的最小直径≥1mm。为加工及电机、轴承及旋转编码器选取便利,取轴径为8mm。
根据三维模型中的仿真结果,分别计算俯仰轴系中各个零件单元的转动惯量后最终相加可得:
=1.70725g·m2
由要求俯仰轴角加速度:=4.17rad/s2
电机所需力矩:
=×=0.0071192325N·m=7.1192325mN·m
3.2 回转轴系计算
由于回转轴一端为悬臂梁,故此悬臂梁支点为最危险截面,以此计算回转轴最小轴径。俯仰轴系总质量约为2kg,悬臂梁长度为20mm。轴材料选用45钢调质处理,其抗弯曲疲劳疲劳强度为260MPa。计算可得回转轴直径≥3mm,在此取回转轴径为10mm。
回转轴系电机摩擦力矩计算:
回转轴系采用一对背对背角接触球轴承和一个深沟球轴承。m=0.5(+)=20mm,=19.6N,每个轴承需加轴向预紧力为=40N,所选角接触球轴承接触角=25°,角接触轴承采用背对背安装,根据经验公式可得:=/3+0.76=36.93N。
故单个轴承的摩擦力矩为:
1=11m=0.003×36.93×0.02=
0.0022158N·m=2.2158mN·m
整个回转轴系的摩擦力矩为:
=31=6.6474mN·m
根据三维模型中的仿真结果,分别计算回转轴系中各个零件单元的转动惯量后最终相加可得:
=0.045kg·m2
由要求回转轴角加速度:=4.17rad/s2
要使扫描镜达到设定转速,电机所需力矩:
2=×=0.18765N·m=187.65mN·m
而回转轴电机需同时带动俯仰轴组件同步转动,计算得俯仰轴电机组件质量=1000g,其重心距离回转轴中心为=80mm。计算可得带动俯仰轴电机组件转动所需力矩:
3=×=0.784N·m=784mN·m
回转轴电机所需力矩为:
=1+2+3=6.6474+187.65+784=
978.2974mN·m
3.3 轴系精度分析
3.3.1 俯仰轴系
俯仰轴系的精度主要由深沟球轴承内圈的径向跳动和轴加工安装时的误差。轴系两侧轴承的同轴度可以用U形架安装面的同轴度来保证。同时设定轴与扫描镜的连接刚度较好,不考虑轴与扫描镜之间的连接偏差,俯仰轴系偏差如图2所示。
应用范围较广的精度等级为P6级,经查表得轴承内圈圆跳动为8μm,由此得轴承所引起的扫描镜偏差为:1=2=(45/90)×8=4mm。另外,按照加工能力和精度要求,查表选定3=3mm。
可引起的最大偏差为:

经计算,俯仰轴系的运动误差为:
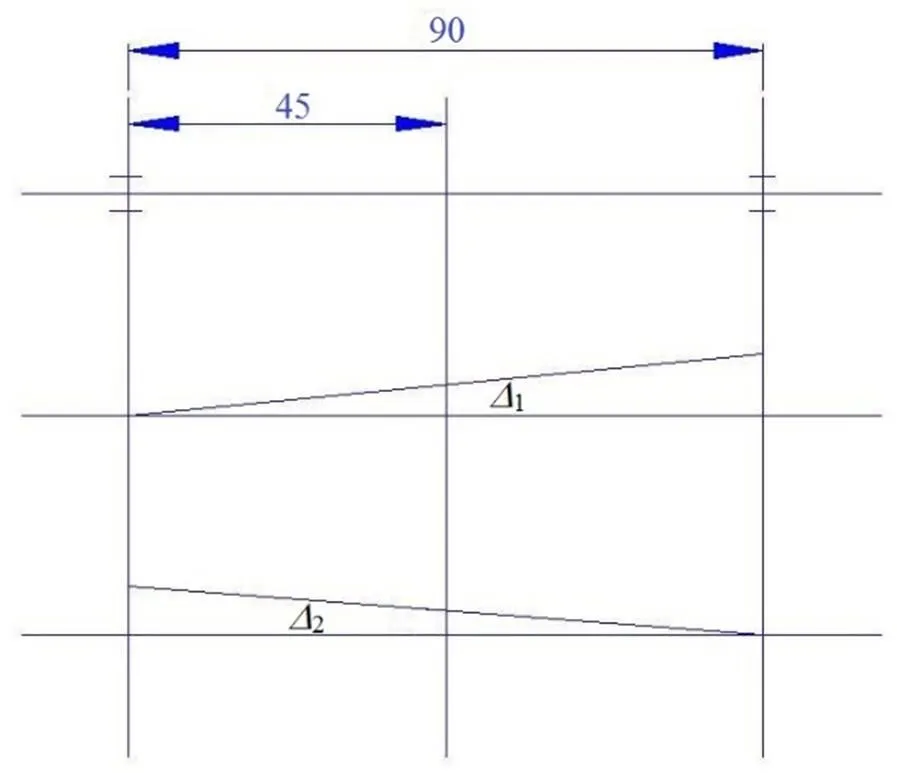
图2 俯仰轴系偏差示意图
3.3.2 回转轴系
回转轴系的运动误差计算方法与俯仰轴系计算方法一致,回转轴系偏差如图3所示。计算可得:
1=12.57mm,2=4.57mm,3=3mm;

经计算得回转轴系的运动误差为:

图3 回转轴系偏差示意图
根据两个轴系的计算结果,选取应用范围较广的P6级精度即可满足俯仰轴系及回转轴系的精度设计要求。
4 结论
根据设计方案建模,得到如图4所示三维模型。经测算,整个扫描机构的重量约为6kg,机构尺寸约为190mm×185mm×175mm,扫描视场及扫描精度可以满足要求。

图4 二维扫描机构模型图
本文所提出的一种新型的扫描镜制备工艺,使该扫描系统具备重量轻、结构紧凑、加工简单等优点,能够在实际工程中应用。
[1] 叶虎勇, 陈桂林. 地球同步轨道三轴稳定卫星的扫描镜设计及考虑[J]. 红外技术, 2003, 25(6): 1-5.
Ye Huyong, Chen Guilin. Scanning mirror design considerations of 3-axis stability satellite[J]., 2003, 25(6): 1-5.
[2] 惠彬, 李景镇, 黄虹宾, 等. 45°二维扫描镜扫描轴系特性分析[J]. 红外技术, 2006, 28(9): 508-511.
Hui Bin, Li Jingzhen, Huang Hongbin, et al. Optical analysis of space two-axis scanning mirror[J]., 2006, 28(9): 508-511.
[3] 康健, 宣斌, 谢京江. 表面改性碳化硅基底反射镜加工技术现状[J]. 中国光学, 2013, 6(6): 824-833.
Kang Jian, Xuan Bin, Xie Jingjiang. Manufacture technology status of surface modified silicon carbide mirrors[J]., 2013, 6(6): 824-833.
[4] 刘云猛, 张宝龙. 空间遥感器两维扫描指向镜的轻量化设计及应用[J]. 红外技术, 2007, 29(12): 688-691.
Liu Yunment, Zhang Baolong. Light-weight design and application of two-dimensional scan pointer mirror in space remote sensor[J]., 2007, 29(12): 688-691.
[5] 苏周华, 姜紫庆, 贾建军. 二维跟踪指向镜结构设计与分析[J].科学技术与工程, 2010, 10(6): 1384-1387.
Su Zhouhua, Jiang Ziqing, Jia Jianjun. Research on structure design of two-dimensional tracking pointing mirror[J]., 2010, 10(6): 1384-1387.
Design Scheme for a Kind of Optical-mechanical Scanner
CAO Dehua
(50,200331,)
Optical-mechanical scanner is an essential part of various remote sensing scanning and imaging systems for aerospace. Moreover, scanning mirror and rotational axis are the critical factors of the scanner. From the point of view of application, the preparation procedures of a large size scanning mirror and the scheme of design and calibration for rotational axis systems in optical-mechanical scanner were discussed. A kind of key implementation technology and solution for scanners with 45° plane mirror is proposed. The scheme was proved feasible by inspection..
optical-mechanical scanner,preparation of scanning mirror,design of axis system
TN958
A
1001-8891(2016)03-0193-04
2015-07-07;
2015-10-17.
曹德华(1982-),男,硕士,工程师,主要从事结构设计方面的研究。E-mail:interc_d_h@163.com。
