一种大口径连续变焦距系统的结构设计
2016-03-28韩西达赵勇志王志臣张耀祖
韩西达,赵勇志,王志臣,张耀祖
一种大口径连续变焦距系统的结构设计
韩西达,赵勇志,王志臣,张耀祖
(中国科学院长春光学精密机械与物理研究所 吉林 长春 130033)
针对某大口径光电探测设备技术指标设计了一种口径为1m级,焦距变化范围为2000~6000mm的大口径、长焦距可见光连续变焦系统。比较了以往的连续变焦结构优缺点,选取了合适的凸轮机构并进行了详细地结构设计。利用有限元软件对连续变焦距系统中的关键结构件凸轮进行了静力学和动力学分析。计算了该种凸轮结构下的连续变焦距系统的精度为3.3mm,满足系统的测量要求。
连续变焦距;大口径系统;凸轮结构;有限元分析
0 引言
近年来随着对大型光电跟踪测量设备要求的不断提高,对能满足大口径、焦距连续变化光学系统提出了新的挑战。以往的光电跟踪测量设备多采用固定焦距的多档位调节。而连续变焦距与其相比具有不丢失目标,对目标做大区域小倍率的概貌观察,同时又能做小区域大倍率的细节观察等优点[1-4]。因此具有连续变焦距功能的大口径光电跟踪测量设备越来越受到国内外研究人员的重视。
目前国内外出现了很多形式的连续变焦距测量系统,但口径在米级的连续变焦系统的设计还未有出现。本文首次提出了主光学系统口径为1m级,焦距连续变化范围为2000~6000mm的大口径、长焦距连续变焦系统的设计。根据光电跟踪测量设备的性能需求,给出了符合需求的光学系统设计。比较了以往的连续变焦结构优缺点,选取了合适的凸轮机构并进行了详细的结构设计,包括电机、传感器的选择。通过光学设计给出的具体数据,设计了圆周上开有两条空间曲线槽的凸轮结构,并利用有限元软件对连续变焦距系统中的关键结构件凸轮进行了静力学和动力学分析。最终设计出符合要求的大口径连续变焦距系统。
1 变焦距系统的光学原理与设计
连续变焦距的光学设计指标为口径大于1m,焦距在2000~6000mm连续变焦,调焦精度在±0.01mm以下,变焦时间在10s内。为适应目前大口径望远镜总体结构的需要,前端主系统采用Cassegrain反射式结构,后端采用机械补偿变倍系统。如图1,由于Cassegrain形式结构紧凑,中心遮拦小,是现代地基大型望远镜最常用的形式。因此系统整体结构选用前端Cassegrain主系统,后接折射式连续变倍系统实现望远镜的连续变焦功能。
变焦距系统按像面补偿方式不同分为光学补偿和机械补偿2种,光学补偿方式由于像面不能完全补偿,不符合需求。由于本系统要求焦距连续变化,采用机械补偿形式。如图2所示,机械补偿形式由前固定组、变倍组、补偿组等构成。图中场镜用于主系统和变倍系统的衔接,准直光束。
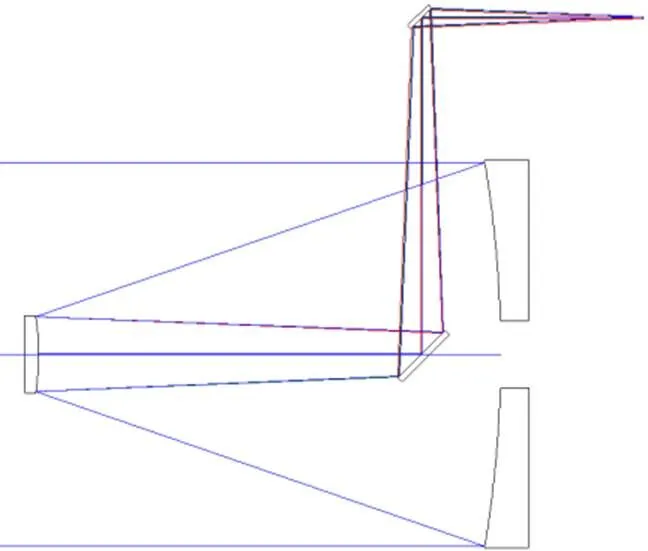
图1 Cassegrain式主系统
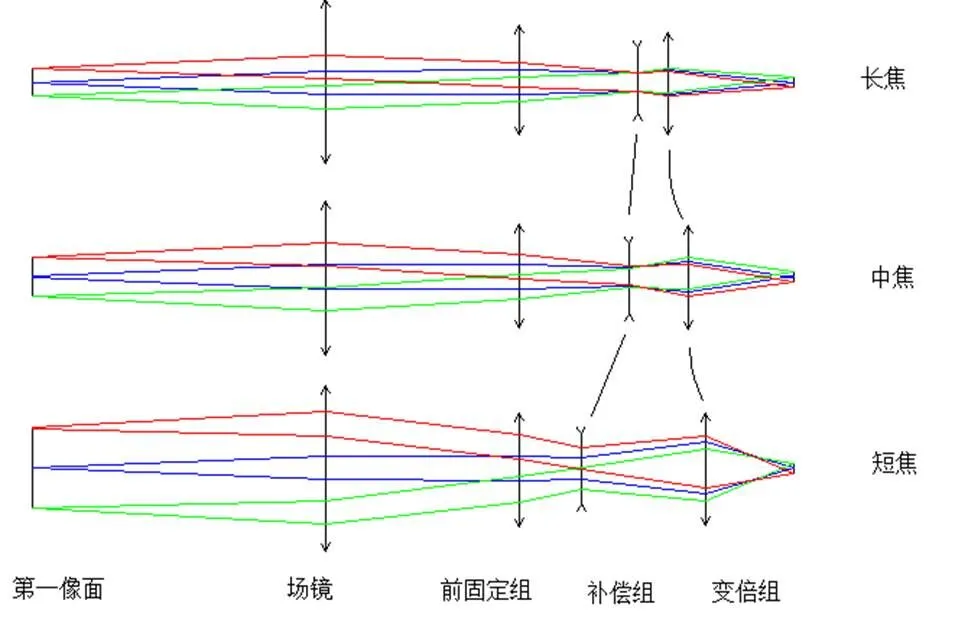
图2 变倍原理图
连续变焦距光学系统的基本原理就是利用变倍组和补偿组两镜组的相对运动来实现焦距的连续变化,来保证固定接受靶面上一直成清晰的像。变倍组改变系统焦距作线性运动,补偿组补偿像面移动作非线性运动[5]。如图3所示,由物象共轭距离恒定求解出变倍补偿曲线。

图3 变倍补偿曲线
2 变焦距结构设计与分析
2.1 凸轮结构设计
凸轮机构是一种常见的变焦机构,其具有运动柔顺冲击小,控制要求简单,工作可靠性高等优点被广泛使用[6-8]。常用的凸轮式变焦距机构分为滑块导轨形式和圆柱导轨形式,而圆柱导轨形式又分为2根导轨和3根导轨形式。根据以往的设计经验,滑块式的凸轮机构和2根圆柱杆式的凸轮机构在工作过程中容易产生卡死现象[9]。如图4所示,采用了3根圆柱导轨形式的凸轮机构,该机构运动平稳、不易卡死,适合较大通光孔径的变焦距结构。步进电机通过行星减速箱带动凸轮转动时,通过导环、导钉将运动传递给补偿、变倍镜组,通过导向轴的导向定位作用,将凸轮的旋转运动转化为变倍、补偿镜组沿光轴方向的平行直线移动。
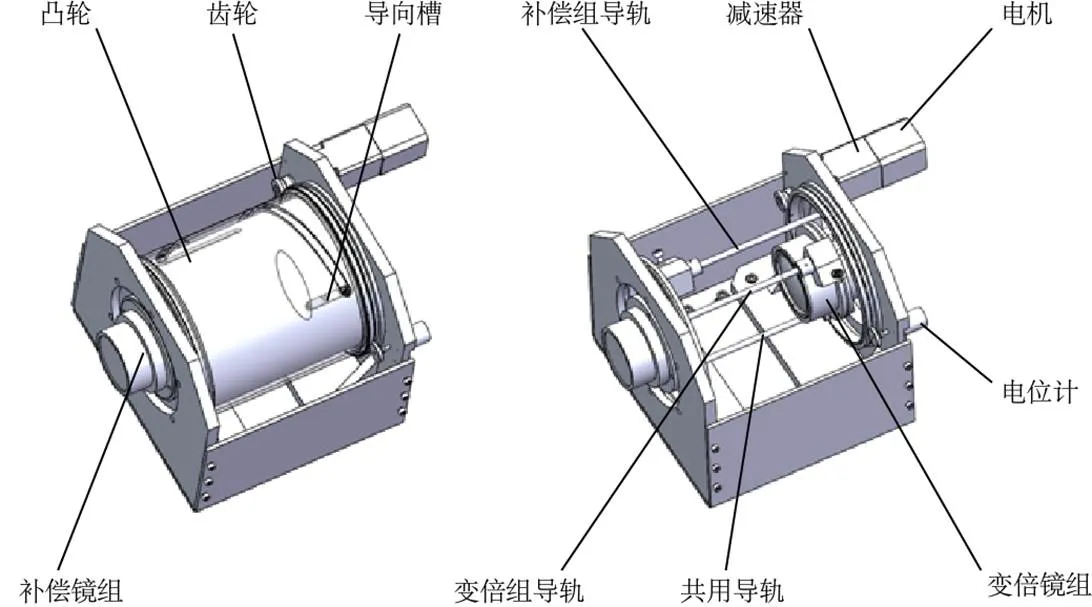
图4 凸轮机构
凸轮圆周上开有两条空间曲线槽,通过该曲线轨迹实现确定的运动轨迹,其中一条为补偿镜组曲线,一条为变倍镜组曲线,使补偿镜组移动时,变倍镜组做相应的移动,达到连续变焦的效果。利用Solidworks软件对凸轮进行三维建模,根据凸轮的设计曲线,设计的凸轮三维模型如图5,槽角度为150°,凸轮升角小于45°。

图5 凸轮三维图
2.2 凸轮的有限元分析
连续变焦距系统结构中,凸轮结构直接影响了变焦距系统的精度,因此有必要单独对凸轮进行有限元分析。将图5所示的凸轮三维模型导入到有限元软件workbench中进行静力学和动力学分析。凸轮模型结构简单,类圆筒状结构,外径170mm,内径158mm,长160mm。如图6,对其采用四面体单元划分网格。

图6 凸轮有限元模型
变焦距系统工作时,分析补偿镜组和变倍镜组上的导钉、导环对凸轮的力为滚动摩擦力。将估算出的力施加在凸轮上,对其进行有限元仿真。如图7所示,凸轮变形云图显示此情况下凸轮形变较小,对整个变焦距系统影响可以忽略。

图7 凸轮的变形云图和应力云图
变焦距系统经常在不同环境下工作,设计凸轮时要考虑到共振带来对系统精度的影响,因此有必要对凸轮做模态分析。图8为凸轮的模态云图,其第一阶固有频率为872.2Hz。较高的一阶固有频率有效地避开一般环境振动频率,证明凸轮结构性能良好。

图8 第一阶模态振型
2.3 驱动电机和传感器的选择
2.3.1 电机驱动力矩的计算
凸轮的转动采用常用的步进电机驱动,步进电机在电机停转时具有较大的转矩,同时设计采用较大的减速比(16:1),以达到凸轮在非工作状态下实现自锁的目的。电机选择时需先计算电机所需的保持扭矩,一般电机扭矩为阻力矩和惯性力矩两部分。
阻力矩的计算公式为:
z=9.55zz/(c) (1)
式中:z为工作机构直线作用力(镜头竖直时受力情况最恶劣,故按1.2个重力计算),z=z;z为直线运动物体的速度;c为传动机构总效率。
克服惯量的加速转矩计算:

式中:L为负载惯量;m为电机惯量;为电机转速;1为加速时间。
电机必须转矩:
m=(z+s)×(3)
式中:为安全系数。取为2,最终计算出电机所需扭矩m=0.2087N×m。因此凸轮驱动电机要选择扭矩大于0.2087N×m的步进电机。
2.3.2 传感器的选择
凸轮机构中选用多圈电位计测量凸轮转过角度的方式来确定补偿镜组或变倍镜组的位置,该设计简单可靠。凸轮用电位计的传动比等于凸轮齿数除以电位计齿轮齿数,即2/1=173/20=8.65。根据凸轮曲线,变倍组从起点走到终点转过的角度为150°,根据传动比为8.65,得到电位计转过的角度为1297.5°,则电位计转过的圈数为1297.5/360=3.604圈。因此选用大于3.604圈的多圈电位计。
2.4 凸轮机构的精度计算
凸轮机构的减速比=4×2/3×1=16×8.65=138.4,步进电机转动一个步距角(1.8°)时,对应的变倍组前进的距离=步距角×行程/减速比×开槽角=0.0033mm (3.3mm),精度满足设计要求。
3 结论
设计了一种口径大于1m,焦距在2000~6000mm大口径连续变焦距系统,调焦精度在±0.01mm以下,变焦时间在10s内。从系统的光学原理出发,介绍了连续变焦距系统的原理,并依此进行了详细地结构设计。通过对系统中关键结构件的静力学和动力学分析,证明了所设计的凸轮结构满足要求。对凸轮机构正常工作所需电机力矩进行估算,以及所需传感器的选择。最后计算了本文设计的凸轮机构的精度为3.3mm,满足设计需求。以上表明这种凸轮结构设计是大口径连续变焦距系统一种较好的解决方案。
[1] 田铁印, 王红. 长焦距大口径连续变焦距光学系统[J]. 光学精密工程, 2014, 22(9): 2370-2374.
TIAN Tie-yin, WANG Hong. Optical zoom system with long focal length and large aperture[J]., 2014, 22(9): 2370-2374.
[2] 江伦, 黄玮. 长焦距大变倍比中波红外变焦距系统设计[J].红外与激光工程, 2012, 41(7): 1868-1871.
JIANG Lun, HUANG Wei. Design of long focal length large room ratio MWIR zoom optical system[J]., 2012, 41(7): 1868-1871.
[3] Kim Hyun Sook, Kim Chang Woo, Hong Seok Min, et al. Compact mid-wavelength infrared zoom camera with 20:1 zoom range and automatic athermalization[J]., 2002, 41(7): 1661-1667.
[4] 胡际先. 长焦距大口径连续变焦光学系统的设计[J]. 应用光学, 2007, 28(9): 570-577.
HU Jixian. Design of long focal length large-aperture optical zoom system[J]., 2007, 28(9): 570-577.
[5] 白翔. 新型高精度变焦距系统设计[J]. 飞行器测控学报, 2012, 31(2): 22-24.
BAI Xiang. Design of a high precision optical zoom system[J]., 2007, 28(9): 570-577.
[6] 晏蕾, 贾平, 洪永丰, 等. 变焦距镜头凸轮曲线形式的选择[J]. 应用光学, 2010, 31(6): 876-882.
YAN Lei, JIA Ping, HONG Yongfeng, et al. Selection of cam curve for zoom lens[J]., 2010, 31(6): 876-882.
[7] 王平, 张葆, 程志峰, 等. 变焦距镜头凸轮结构优化设计[J]. 光学精密工程, 2010, 18(4): 893-898.
WANG Ping, ZHANG Bao, CHENG Zhifeng, et al. Optimal design of cam structure of zoom lens[J]., 2010, 18(4): 893-898.
[8] Su Yan-qin, Zhang Jing-xu, Lv Tian-yu, et al. Mechanism design of continuous infrared lens[J]., 2013, 8907: 890735- 1-6.
[9] 王一凡, 薛育. 一种大口径高精度凸轮变焦机构的设计[J]. 光学精密工程, 2007, 15(11): 1757-1759.
WANG Yifan, XUE Yu. Design of heavy calibre and high precision cam-varifocal mechanism[J]., 2007, 15(11): 1757-1759.
Mechanism Design of a Large-aperture Continuous Zoom Optical System
HAN Xida,ZHAO Yongzhi,WANG Zhichen,ZHANG Yaozu
(,,,130033,)
A continuous zoom optical system with an aperture of 1m and the focus range of 2000-6000mm is designed, which is based on the technical requirements of a kind of large-aperture optical equipment. An appropriate cam mechanism is selected and is designed specifically by comparing the advantages of the former structure of continuous zoom optical system. The static and dynamical analysis of the cam’s structure is presented by using FEM software, which is the key element of the structural system. The precision of this continuous zoom optical system is 3.3mm, which meets the measure requirements.
zoom optical system,large-aperture system,cam structure,FEA
TH751
A
1001-8891(2016)03-0203-04
2015-05-15;
2015-06-16.
韩西达(1988-),男,黑龙江哈尔滨人,硕士,研究实习员,主要研究方向为精密光机结构设计与仿真分析。E-mail: hanxida123@163.com。
