基于嵌入式PLC的秸秆切割力动态控制方法研究
2016-03-24邓明华汪小志鲍秀兰
邓明华,葛 蓁,熊 琼,汪小志,鲍秀兰
(1.武汉工商学院 信息工程学院,武汉 430200;2.南昌大学,南昌 330031;3.华中农业大学 工学院,武汉430070 )
基于嵌入式PLC的秸秆切割力动态控制方法研究
邓明华1,葛蓁1,熊琼1,汪小志2,鲍秀兰3
(1.武汉工商学院 信息工程学院,武汉430200;2.南昌大学,南昌330031;3.华中农业大学 工学院,武汉430070 )
摘要:为了实现秸秆的综合利用,降低秸秆燃烧对环境的污染,首先需要对秸秆进行切割操作。秸秆的切割力是影响切割装置机械效率的主要因素,因此对切割装置优化设计时需要得到农作物秸秆切割过程使用的最佳切割力。为此,设计了一种新的秸秆切割力的控制系统。该系统采用PLC嵌入式系统对刀片传感器的数据进行采集,采用 Dijkstra算法对数据进行处理,将处理结果作为电机控制的条件,调控切割力,并通过反馈调节来控制电机转速,从而降低功耗,提高切割效率。为了验证该系统的有效性和可靠性,通过实验的方式对切割系统进行了测试。测试结果明明:该系统的功耗低,切割时间短,大大提高了农作物秸秆的切割效率,为农作物秸秆的综合利用和生态农业的发展提供了技术支持。
关键词:秸秆切割;切割力;反馈调节;嵌入式;PLC控制
0引言
随着普通耕作方式和秸秆焚烧带来的土地流失加剧、土壤肥力不断下降、空气雾霾污染加重,人们逐渐意识到保护耕地、保护环境的重要性和紧迫性。针对农作物秸秆作为废弃物或者直接在田间焚烧带来的资源浪费和土壤环境污染,人们对秸秆的处理及利用方式提出了很多建议。随着秸秆的综合利用技术越来越成熟,越来越多的秸秆将被综合利用,而不能简单全部进行还田,特别是寒冷的地区很难保证秸秆有效地腐烂而进行有机质还田。将农作物秸秆切割后进行综合利用是一种非常好的秸秆利用方法;但是受技术条件的限制,农作物秸秆的切割效率和功耗问题依然是实现秸秆切割和粉碎技术的难点。
本文在现有农作物秸秆切割装置研究的基础上,采用PLC嵌入式装置设计了一种新的秸秆切割装置。该装置可以有效地对切割力进行动态控制,从而实现了切割力的优化。采用 Dijkstra算法对滑切角度进行控制,利用传感器对力学信息进行采集,并对数据处理,将处理结果作为电机控制的条件,调控切割力,改善农作物秸秆的切割效果,从而提高了秸秆的切割效率,降低了切割的功耗。
1切割力动态控制原理
切割器是农作物秸秆切割装置的最重要组成部分,作用是将农作物秸秆切断,包括切割部分和推进部分。本次研究采用往复式的切割器,其结构简单、工作稳定性较好,适用于小麦、水稻、牧草等秸秆矮、细、硬度低的农作物。为了实现切割力的动态控制,在3刀片部分设计了6刀片力数据采集的传感器,并利用嵌入式PLC系统对数据进行采集。装置的结构如图1所示。
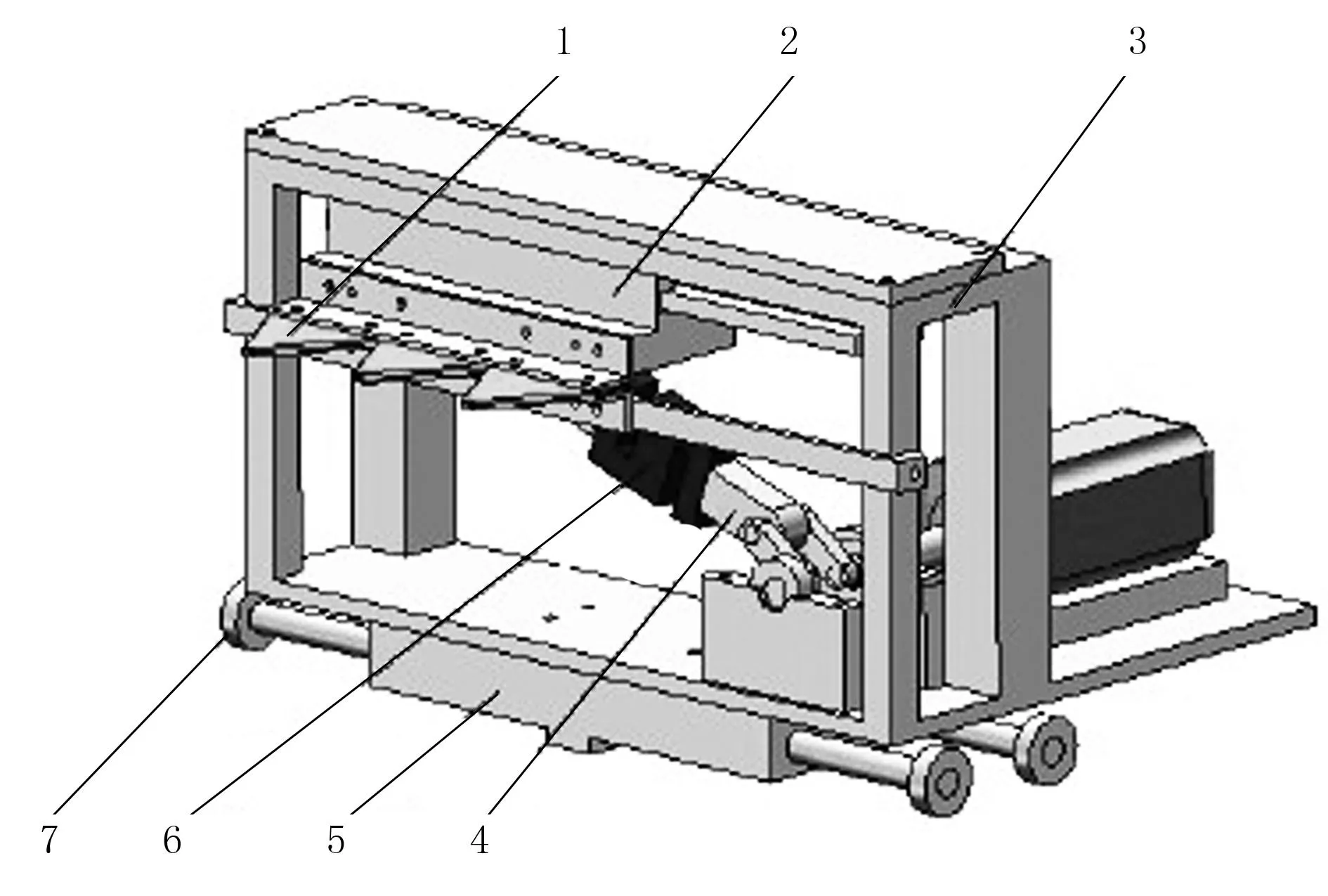
1.切割刀片 2.滑块 3.机体架
为了实现切割力的动态控制,采用PLC嵌入式系统对刀片传感器的数据进行采集。当切割力矩较小时,通过反馈调节来控制电机转速,从而降低功耗,提高切割效率,其控制原理如图2所示。切割力主要采用PLC嵌入式系统进行控制。通过力学传感器采集到信息后,PLC对数据进行处理,并根据Dijkstra算法对滑切交进行优化设计,最终实现切割力的动态控制。
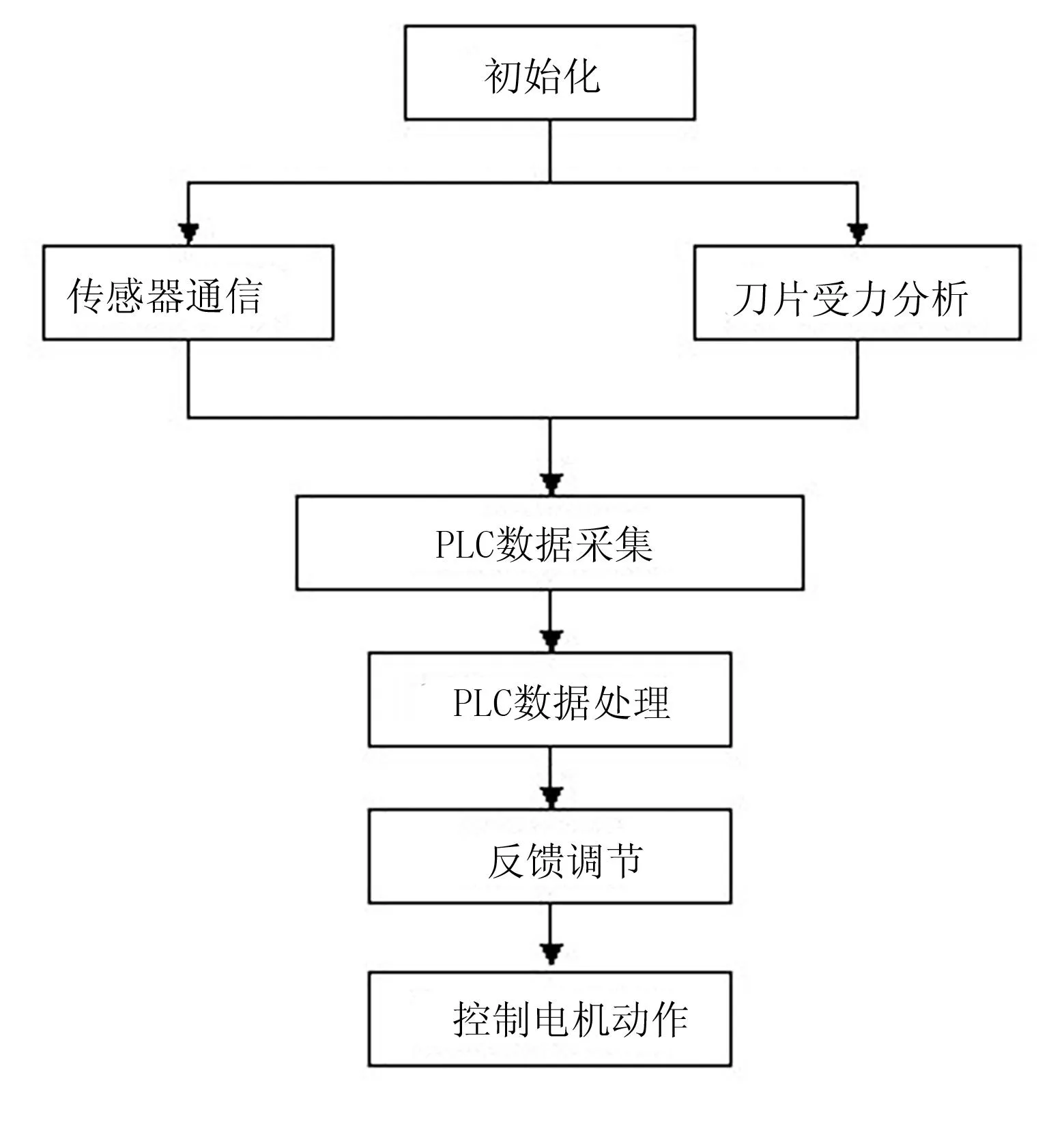
图2 切割力变流量控制原理
2切割力控制算法优化
茎秆受刀片的作用力可以分解为水平方向力Fx和铅垂方向力Fy;Fg为茎秆受到以速度v运动的刀片冲击时茎秆欲保持静止的惯性力;Fa、Fb和M0为地面对茎秆根部的约束反力和地面对茎秆的反力矩。茎秆受力平衡方程为
(1)
其中,L为惯性力作用点与地面间的垂直距离;h为作用点与地面间的垂直距离。在实际秸秆切割过程中,一般采用滑切的形式。从宏观方面来看,当进行滑切操作时,切入材料的实际楔角为γ′,如图3所示。
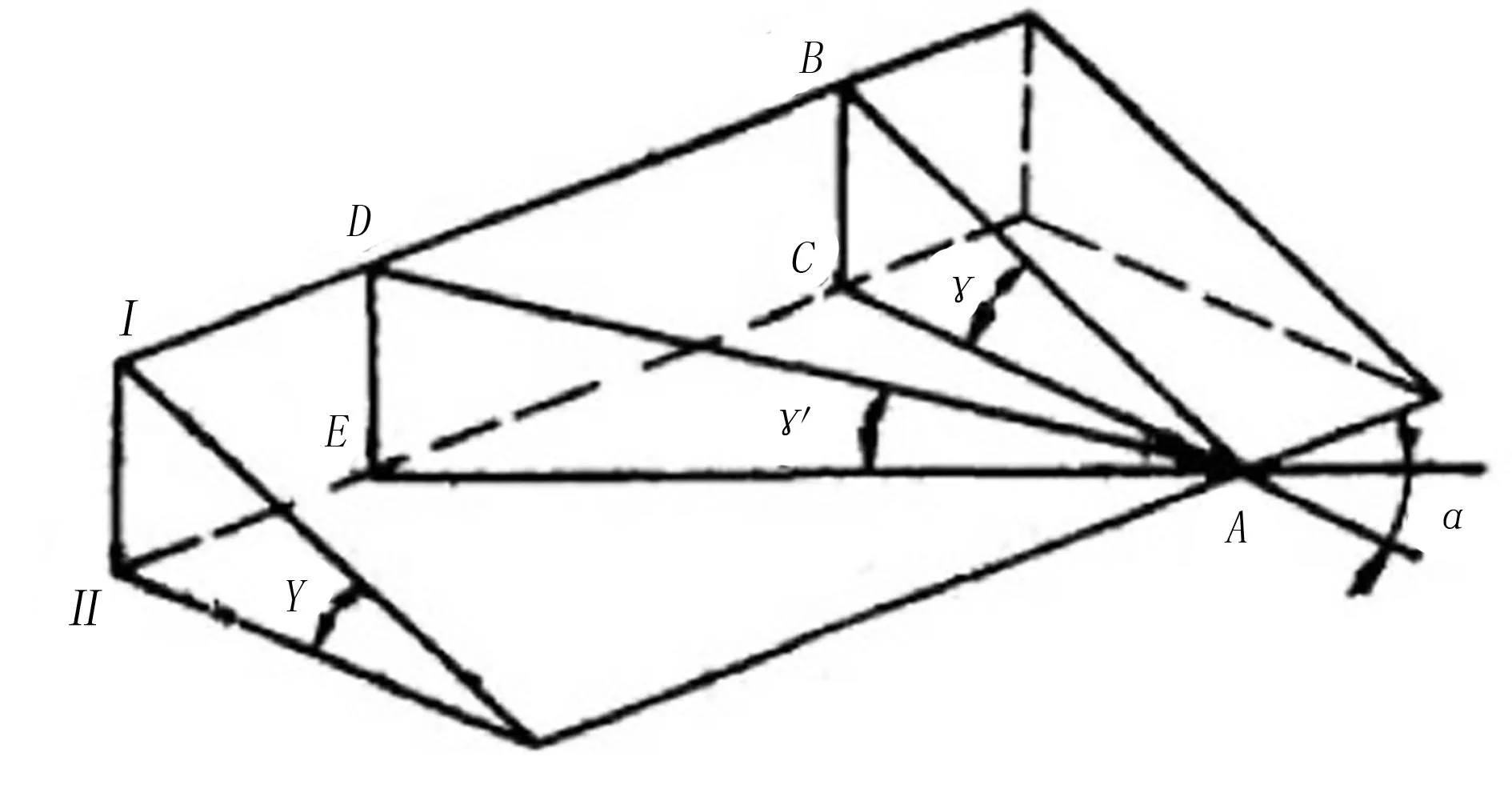
图3 滑切时刀刃楔角的变化
根据图3,可以得到如下公式,即
DE=BC
(2)
所以,当滑切角α越大时, 正切值就越小,刀刃切入材料的实际楔角就越小。为了实现切割力的最优化设计,需要对滑切的方向进行调整,并通过电机控制切削力的变换。为了达到这个目的,采用 Dijkstra算法对模型进行优化。
假设滑切角都有一个标签(WJ,PJ);其中WJ是S从起源点到J点的最优角度,PJ是从S到前一个点的最优角度。求解从起源点到J点的角度的基本过程,最优角度算法如下:
1)初始化。原点设置:WS=0,PS是空的,其他点WI=∞,PI=?,标记的起源点S,设K=S,所有其他点设置未标记。
2)标记的点K到其直接连接的测试未标记点J的角度,并设置WJ=MIN{WJ周DKJ}的类型,DKJ点K的直接连接角度J。
3)选择下一个点。从所有未标记的节点,选择WJ最小的一个I:WI=MINWJI点选择为的最优角度,并设置为已标记。
4)找到I的第一点。从标记点中找到点I直接连接的点J1,作为前点,设I=J1。
5)标记点I。如果所有点已标记,该算法将彻底计算出来,否则记为K=I,转到2)继续。
图4表示算法的演化过程。根据上面的理论与思想,本次研究使用Microsoft公司的visual studio2008软件、C#语言和Access数据库编写,得到以Dijkstra算法为基础的最优化滑切角α。其中,算法的关键的代码如下:
private void ShortestDist(int s)
{for (int i = 0; i < NUM; i++)
{dist[i] = Da.Edge1[s, i];
S[i] = 0;
if (i != s && dist[i] < Da.Uplimit)
{
path[i] = s;
}
else path[i] = -1;
}
S[s]=1;
dist[s] = 0;
for (int i = 0; i < NUM - 1; i++)
......
public void getdata(int s, int e)
{
D[0] = e;
int k;
for (k = 0; D[k] != s; k++)
{if (D[k] == -1)
{
MessageBox.Show("抱歉,没有找到通路");
return;
}
D[k + 1] = path[D[k]];
}
if (S[e] != 0)
{
for (; k != -1; k--)
{
lstLine.Add(D[k]);
if (lstLine.Count >= 2)
{
length = length + Da.Edge1[LstLine.Count - 1, LstLine.Count - 2];
} }}
else
{}
this.Refresh();
}
......

图4 Dijkstra算法最优化滑切角α应用演示图
3秸秆切割力动态控制实验
为了验证所设计切割力优化模型的有效性和可靠性,采用实验的形式对农作物切割系统的切割效果进行测试。为了实现切割力的调节,本研究采用变流量泵对切割刀片的力进行控制,变量泵如图5所示。

图5 力士乐A4VG变量泵
力士乐A4VG变量泵的液压无级调节性能较好,且其液压无级调节与电子技术、计算机控制技术有良好的适配性。因此,本研究选择该款变流量泵作为切割力调节装置,其主要模型如图6所示。

图6 变量泵模型
液压马达选用的是Sauer Danfoss90系列轴向柱塞马达。马达的流速是由轴转速、冲击损失、马达排量和进口压力共同决定的;马达的排量为75mL/r,理论扭矩 499.8N·m,补油泵的排量为20mL/r。
图7为切割过程中切割力的变化曲线。在同一种作物切割起始阶段,系统需要根据秸秆的粗细对切割力进行优化调节。通过测试发现,切割力通过反馈调节后最好能稳定地输出。
在切割过程中,动态扭矩测试仪不断采集数据,从而可以观察在切割过程中的切割扭矩的变化,如图8所示。在秸秆和刀片碰撞时刻,切割扭矩变化较大,但是变化时间较短,说明切割效率较高。

图7 切割力变化曲线

图8 切割扭矩变化

实验序号切割力动态调节装置功耗传统切割装置功耗17.259.2827.369.9937.4210.2147.5810.3657.6911.2567.2110.9677.3210.8787.5811.2397.2212.21107.3013.29
如表1可知:通过的10次切割试验,使用普通切割装置切割玉米秸秆平均消耗的功耗要明显高于本次研究设计的装置,功耗的变异系数相比普通的切割装置也小很多。

表2 切割时间测试结果表
由表2可以看出:使用本设计的切割力优化系统可以大大缩短切割时间。这是由于在变流量控制系统作用下,切割系统可以选择最佳切削力对秸秆进行切割,从而大大提高了秸秆的切割效率。
4结论
为了提高秸秆的机械切割效率,设计了一种新的切割力动态调控的切割系统。该系统依据切割力调控的基本原理,实现了切割力的优化设计,降低了系统的功耗,提高了作业效率。系统采用PLC嵌入式系统对刀片的数据进行采集,利用Dijkstra算法对切割的滑切角进行优化,并将数据处理结果作为电机反馈调节的条件,实现了切割过程的优化设计。对秸秆切割系统进行了测试,结果表明:切割力通过反馈调节后能稳定地输出,一次切割力矩变化的时间较短,切割速度较快,并且功耗低,大大改善了农作物秸秆的切割效果,可以在农作物秸秆切割机中推广使用。
参考文献:
[1]张道林,刁培松,董锋,等.拨禾指式不对行玉米收获装置的试验[J].农业工程学报,2010,26(5):103-106.
[2]杜现军,李玉道,颜世涛,等.棉秆力学性能试验[J]. 农业机械学报,2011,42(4):87-91.
[3]宋占华,肖静,张世福,等. 曲柄连杆式棉秆切割试验台设计与试验[J].农业机械学报,2011,42(11): 162-167.
[4]王锋德,燕晓辉,董世平,等. 我国棉花秸秆收获装备及收储运技术路线分析[J].农机化研究,2009, 31(12):217-220.
[5]李耀明, 秦同娣, 陈进,等.玉米茎秆往复切割力学特性试验与分析[J].农业工程学报,2011, 27(1):160-164.
[6]赵湛,李耀明,徐立章,等.超级稻单茎秆切割力学性能试验[J].农业机械学报,2010,41(10):72-75.
[7]唐忠,李耀明,徐立章,等.单茎秆切割试验台的设计与试验[J].农机化研究,2009,31(12):141-143.
[8]李玉道,杜现军,宋占华,等.棉花秸秆剪切力学性能试验[J].农业工程学报,2011,27(2):124-128.
[9]介战,罗四倍,周学建.基于 LabVIEW 的联合收割机水稻喂入量遥测试验[J].农业工程学报, 2009, 25(S2):87-91.
[10]高峰,俞立,王涌,等.无线传感器网络作物水分状况监测系统的上位机软件开发[J].农业工程学报,2010,26(5):175-181.
[12]陈亮,赵兰坡,赵兴敏.秸秆焚烧对不同耕层土壤酶活性、微生物数量以及土壤理化性状的影响 [J]. 水土保持学报,2012(4):118-122.
[13]张文芝. 秸秆焚烧问题的经济学分析与对策 [J].对外经贸, 2012(6):104-105.
[14]刘奎明,贾文和,王贵.东辽县生物质能源利用前景展望[J].农村科学实验,2012(8):8-9.
[15]贾洪雷,马成林,李慧珍,等.基于美国保护性耕作分析的东北黑土区耕地保护[J].农业机械学报, 2010(10):28-34.
[16]严廷桂. 西北地区保护性耕作技术的重要性[J].经济研究导刊, 2011(16):22-23.
[17]张宗军,窦学诚.西北旱作农业区宜采用保护性耕作[J].现代农业科技,2010(6):297,304.
[18]陈继革.保护性耕作及其在我国发展的必要性 [J].地理教育,2008(1):20-21.
[19]彭万臣.寒地黑土区宜实施保护性耕作[J].中国水土保持, 2009(1):10-13.
[20]翟玲玲,潘莹玉.浅析生物质能[J].决策探索, 2010(7):45.
[21]Chen G Y, Zheng Z, Yang S G, et al. Experimental co-digestion of corn stalk and vermicompost to improve biogas production [J]. Waste Manage, 2010, 30(10):1834-1840.
[22]张强,秦涛,张红艳,等.玉米秸秆的综合开发利用 [J].玉米科学,2006(2):168-169.
[23]Behin J, Zeyghami M. Dissolving pulp from corn stalk residue and waste water of Merox unit [J]. Chem Eng J, 2009, 152(1):26-35.
[24]崔明,赵立欣,田宜水,等.中国主要农作物秸秆资源能源化利用分析评价[J].农业工程学报,2008(12):291-296.
[25]汪海波,秦元萍,余康.我国农作物秸秆资源的分布、利用与开发策略[J].国土与自然资源研究, 2008(2):92-93.
Research on the Dynamic Control Method of Straw Cutting Force Based on Embedded PLC
Deng Minghua1, Ge Zhen1, Xiong Qiong1, Wang Xiaozhi2, Bao Xiulan3
(1.School of Information Engineering,Wuhan Technology and Business University,Wuhan 430200,China;2.Nanchang University,Nanchang 330031,China;3.College of Engineering,Huazhong Agricultural University,Wuhan 430070, China)
Abstract:In order to realize the comprehensive utilization of straw straw burning, reduce pollution to the environment, first of all need to cut the operation of straw, straw cutting force is the main factor affecting the cutting device of mechanical efficiency, so the optimization of the design of cutting device needs to be crop straw cutting process using the best cutting force. Puts forward a new control system of straw cutting force, the system adopts data acquisition of blade sensor of PLC embedded system, Dijkstra algorithm is used to process the data, the processing result as the motor control conditions, regulation and control of cutting force, and through the feedback to control the speed of the motor, thereby reducing power consumption, improving the cutting efficiency. In order to verify the effectiveness of the system and the reliability, by the way of experiments on cutting system was tested, found by testing, power consumption of the system is low, cutting short time, greatly improving the cutting efficiency of crop straw, in order to develop comprehensive utilization of crop straw and ecological agriculture provides technical support.
Key words:straw cutting;cutting force; feedback control; embedded; PLC control
文章编号:1003-188X(2016)02-0044-05
中图分类号:S226.8;S126
文献标识码:A
作者简介:邓明华(1981-),女,湖北恩施人,讲师,硕士。通讯作者:汪小志(1981-),女,武汉人,讲师,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金项目:湖北省自然科学基金项目(2014CFB322)
收稿日期:2015-01-28
