小型移动目标微波探测系统设计
2016-03-22杭州电子科技大学电子信息学院高惠芳
杭州电子科技大学电子信息学院 张 磊 高惠芳
小型移动目标微波探测系统设计
杭州电子科技大学电子信息学院张磊高惠芳
【摘要】基于微波雷达的多普勒效应,设计了一种基于微波传感器和PIC12F675微控制器的小型探测系统。该系统由微波传感器、信号放大滤波电路和单片机采样处理电路三部分构成。详细分析了该探测系统的工作原理和微波传感器、信号处理电路的设计。在此基础上进行了实验,结果表明:该系统在一定范围内实现了对移动目标的实时探测,并且具有小体积、低成本、隐蔽性好、易于安装等优点。
【关键词】微波传感器;多普勒效应;移动目标探测
0 引言
本文设计了一个工作于10.52GHz的小型微波探测系统,该系统基于多普勒效应,可实现对移动目标的实时探测。该系统主要包括微波传感器、信号放大滤波电路和单片机采样处理电路。微波探测传感器设计部分,采用介质柱(DR)和高频FET管组成的介质振荡器为系统提供频率源,采用电容直接耦合,第一路信号由发射天 线发射出去,第二路信号送往混频器; 混频器采用U型传输线和二极管组成的反相单平衡混频器;收发天线分别采用矩形贴片天线单元。信号放大处理部分,选用集成运放芯片LM358设计两级放大电路,同时实现带通滤波, 对传感器输出的中频信号进行放大,滤除高频干扰;信号采样部分,以 PIC12F675单片机为处理器,将采样到的信号电压与设定的门限电压3V进行比较,超过门限电压表示移动物体存在,点亮警示灯,以完成移动目标的探测。
1 工作原理
微波传感器是微波探测系统的核心,它的工作原理是多普勒效应。电磁波或声波频率因馈元本身或/和目标物相对运动所引起的频率改变称为多普勒频移,或称多普勒效应。
声源的波长定义为=Csound/f,此处Csound是声波在给定介质中的传播速度,f是声源的频率。如果声源和观察者都移动,则观察者接收的频率为[1]:

发生多普勒频移时,混频器将发射信号和反射信号进行混频,输出一中频信号,即多普勒信号,探测系统检测到该信号则可判定有移动目标存在。
2 系统总体设计
本文设计了一个X波段微波探测系统,实现对移动目标的实时探测。微波传感器模块包括:介质振荡器、混频器和微波收发天线三部分。后续处理电路主要包括信号放大滤波电路和单片机采样电路。系统总体结构如图1所示。
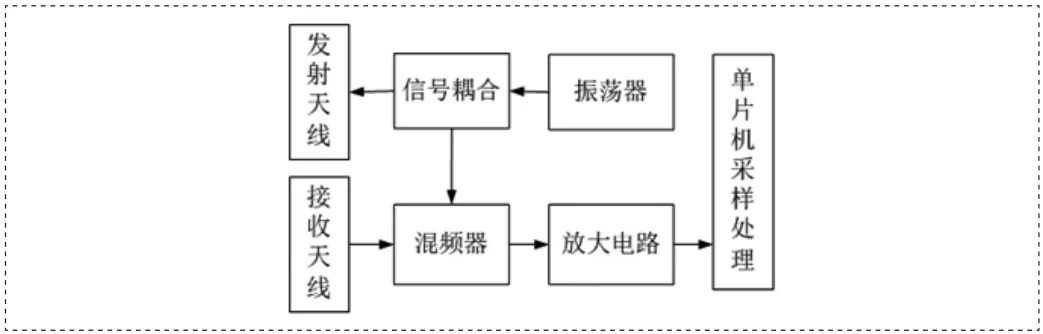
图1 系统结构图
3 系统硬件设计
3.1微波传感器的设计
传感器射频前段由四部分组成,包括介质振荡器、混频器和收发天线。本文设计的传感器工作频率为10.52GHz,原理图如图2所示,其中ANT101为发射天线,ANT1022为接收天线,IF为传感器输出的模拟电压。
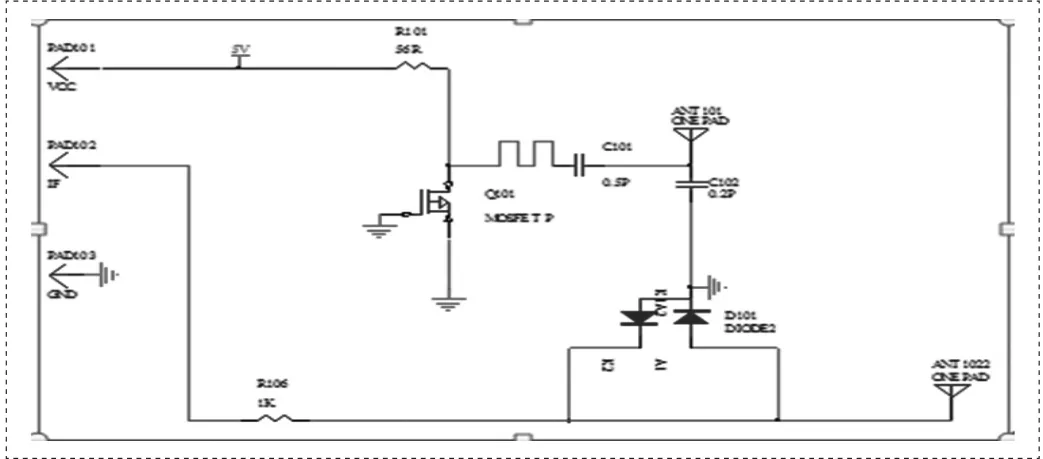
图2 传感器原理图
微波传感器为了增大天线增益和减小天线副瓣,大多采用天线阵列作为收发天线[2]。为了减小前端尺寸,实现小型化,本设计采用矩形贴片天线用于发射和接收信号。
介质振荡器采用介质柱(DR)和高频场效应管搭建。本设计选取砷化镓场效应管NE3210S01作为高频场效应管,不仅可以工作在10.52GHz频率,而且相噪系数比较小。振荡电路采取串联反馈型、共源极电路结构,谐振器放置在场效应管的栅极,信号从漏极输出,在源极加入反馈使电路工作在非稳定状态。小功率传感器中大量使用的是微带线结构形式的分布参数功率分配器[3],这种传感器需要占据一定的平面尺寸,本设计采用集总参数功率分配器的LC式,直接通过电容耦合来分配。混频器采用单平衡设计[4],选用集成电路芯片HSMS-8202,内部由两个相同的二极管串联构成,该集成芯片在10GHz到14GHz范围内工作性能达到最佳状态,而且它的变频损耗、封装电阻、电容等都比较低。
射频电路与收发天线之间的结构是背靠背式的,从而使射频信号由金属馈电柱传递到天线,提高整体的抗过载性能。传感器输出的中频信号在毫伏级,需要外接放大电路。根据多普勒频移公式,设定移动目标速度的范围确定放大电路的带宽,滤除高频干扰。放大电路板和天线板、射频板也采取背靠背式结构,整个传感器的尺寸为27mm× 16mm,实物图如图3所示。
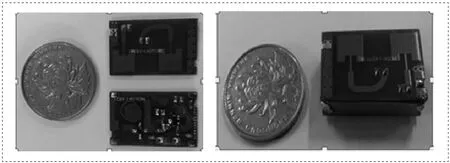
图3 射频前端电路、贴片天线和整体结构图
3.2信号放大滤波电路
中频信号的输出频率和移动目标的速度关系为fd=2vrf0/C,其中f0为探测器发射频率,在这里取10.52G来计算,C为电磁波在空气中的传播速度,近似可以认为是光速。针对不同速度的移动目标,引起的多普勒频移也有一个范围,在几赫兹到几千赫兹不等。本文探测目标的移动速度在1m/s—20m/s范围,对应的多普勒频移为70Hz—1.5KHz。根据放大倍数和通频带范围,所设计的放大滤波电路如图4所示。
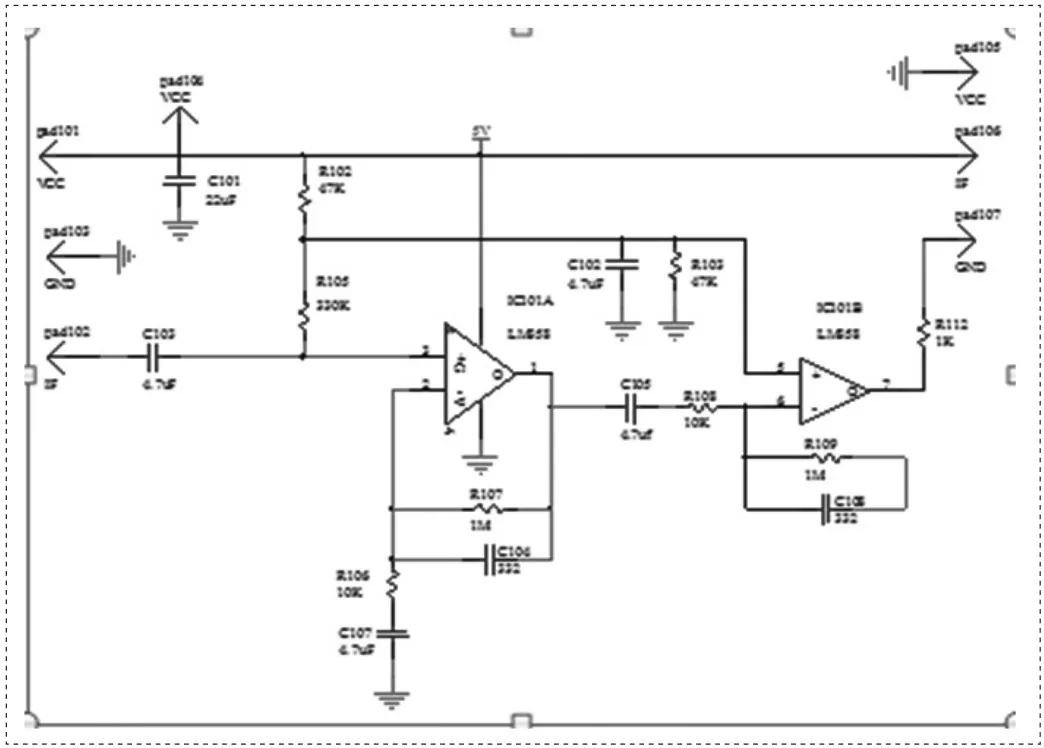
图4 放大电路图
3.3单片机模块
BMI、TG、FBG、FCP 是 T2DM 并发 NAFLD 的高危因素(OR>1),HDL-C、AST、ALT、GGT、2 hCP 与 T2DM并发NAFLD无明确相关性(OR<1)。见表2。
出于低功耗、低成本等的综合考虑,选择PIC12F675单片机做为控制器。PIC12F675是Microchip公司推出的一款高性能8位8引脚超低功耗RISC单片机,片上资源丰富,非常适合于追求低功耗、低成本仪器的需要[5]。传感器输出的模拟电压经由单片机的A/D模块转换,将转换后的数字电压与提前设定的3v门限电压相比较,输出一控制警示灯亮灭的开关信号,从而可判定在检测范围内是否有移动目标的出现。
4 软件设计
单片机对放大滤波电路输出的电压采样,采样后与设置的门限电压3.0V作比较,采样电压超过设定门限值,将连接信号LED的引脚GPIO5置0,警示灯被点亮,采样值小于3.0V,将GPIO5置1,警示灯将熄灭。单片机软件设计的程序流程图如图5所示。
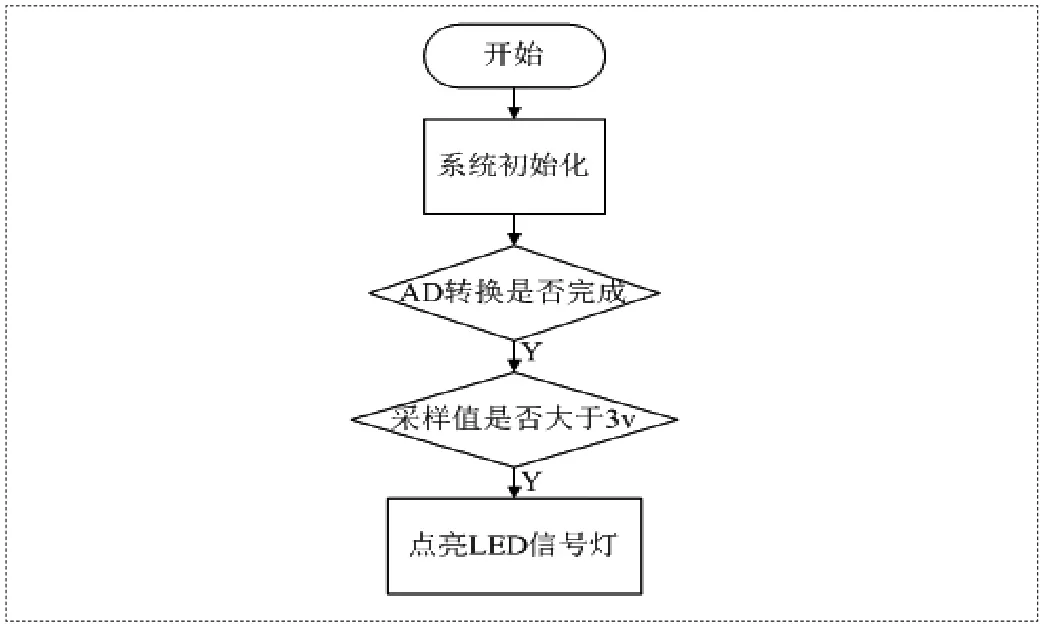
图5 程序流程图
5 测试结果
5.1传感器功能测试
传感器前端没有移动目标情况下,接收天线未能接收到回波信号,此时传感器输出的是稳定的2.5v直流电压,如图6中(a)所示;前端有移动目标情况下,传感器输出电压幅值在0V和3.7V之间波动,如图6中(b)所示。测试结果表明缩小尺寸后的传感器能基本实现探测移动目标。

图6 传感器输出波形
5.2径向最远距离探测
将传感器和单片机采样板放进模拟装置,实验分别选取人和矩形金属板为目标,金属板长1.4米,宽1.0米。沿着装置径向方向以正常步行速度(1.3米/秒)移动,记录能探测的最远距离。从图7中看出距离传感器5米左右时,人移动引起的多普勒信号最高幅值略大于3V,能被单片机检测出,警示灯闪烁。距离增大时,人移动引起的多普勒信号幅值降低,略低于3V,此时单片机检测出信号的幅值大小,判断小于设置的门限电压,认为没有移动物体存在,警示灯一直处于熄灭状态。实验结果表明:最远能探测到人的距离为5米左右,能探测到金属板的距离为20米左右。
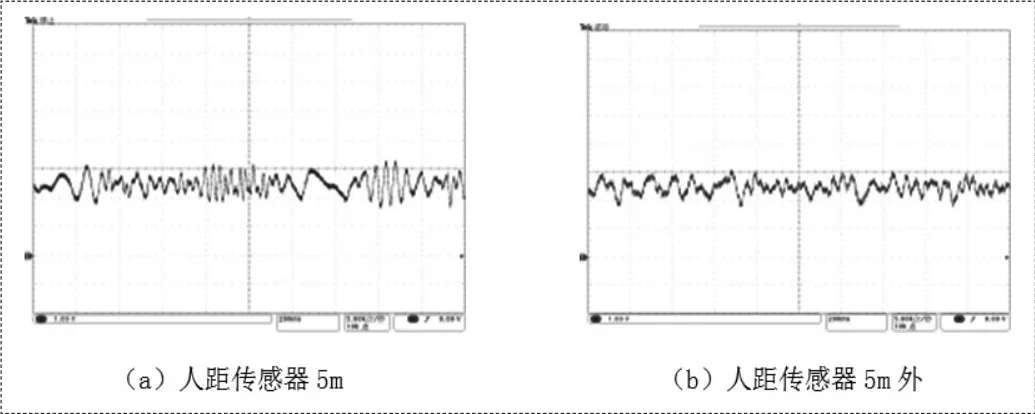
图7 示波器输出波形
6 结束语
本课题设计了一个基于多普勒效应的小型微波探测系统,探测系统发射一个高频信号,发射信号遇到移动目标障碍物,反射回一个带多普勒频移的回波信号,经混频器混频输出频率较低的中频信号,经放大滤波电路处理,被单片机检测识别并显示预警信号。经过实验测试,可实时精确检测到20米范围内的物体。
参考文献
[1]吴顺君等.雷达中的微多普勒效应[M].电子工业出版社,2013.
[2]张福云.基于小型化天线的多普勒传感器研究[D].电子科技大学,2013.
[3]雷振亚,明正峰,李磊等.微波工程导论[M].科学出版社,2010:93-103.
[4]陈智勇.微波厚膜集成电路的设计与应用[D].南京理工大学,2007.
[5]梁亚林,张永立,沈天健.基于PIC12F675的低误报智能入侵探测器设计[J].测控术,2003,22(9):22-24.