分析大型天线测量方法研究及应用
2016-03-22长沙航空职业技术学院刘高山
长沙航空职业技术学院 刘高山
分析大型天线测量方法研究及应用
长沙航空职业技术学院刘高山
【摘要】本文首先针对全站仪测量系统和近景摄影测量系统进行简单阐述,进而对于全站仪在天线测量中的应用进行分析,以及详细探究了近景摄影测量的相关影响因素,并给出应用方法。
【关键词】大型天线;全站仪测量系统;近景摄影测量;坐标转换
天线广泛应用军用以及民用的各个领域,随着科技的发展,对于天线发射面精准度要求也越来越高。本文就针对大型天线的测量方法展开分析以及研究,最终形成了天线模型的三维显示。
1 全站仪测量系统方法
1.1系统原理、配置
全站仪测量系统的原理较为简单,其运行利用的测量原理是极坐标测量法,仅针对水平角以及天顶距进行测量,三维的坐标测量点就可以获得。该系统运行原理图如下:

测量坐标系的概念是,将三轴中心作为原点,尽量保持仪器平整,在这种保持仪器水平的基础上将Y轴作为转盘,将Z轴作为垂直线的方向。通过以上处理,就可以有效地把水平面和采样点二者之间的关系确定下来。测量水平角用α表示,天顶距使用β表示,斜距使用S表示,待测点使用P来表示,对α、β、S具体情况进行测量,能够科学计算出P点的具体坐标。
该测量系统的计算坐标的公式为:
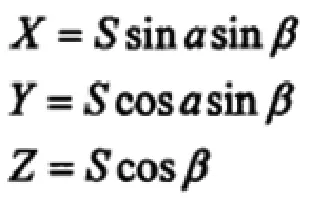
由此我们可以假设水平角以及天顶距这二者的测量角度的精确度,前者精度为ma,后者的精度为mβ,我们可以容易得出,P点的精度的计算公式是:

就单台的全站仪来说,其测量配置是较为简单点的,主要构成部分也只有简单的几件,包括全站仪、手提电脑、相关的软件支持平台、稳定度较高的三脚架、进行通讯的相关设置、以及对应的测量放等。在目前阶段精准度最高的是Leica企业出产的全站仪,同时该企业生产的全站仪具有极高的自动化水平,其中自动实施跟踪的全站仪的标志为“A”,由马达驱动的进行的全站仪的标志为“M”。该全站仪的测角标的误差控制0.5以内,在120m的范围内,其测距精准度可以达到0.19~0.50mm
1.2全站仪测量系统在天线测量中的应用
全站仪测量系统自身有着较大的优势[1],尤其是其简单的配置,灵活地设站方式,简捷的机器操作,以及测量中极高的精准度得到了广泛的关注,因此全站仪发展前景必然是广阔的。但是就目前而言,全站仪的发展尚且存在问题,只能够对棱镜采取自动识别,而反射片的自动识别仍处于研究阶段,今后必须加大研究力度。此外,加大全站仪的改进研究,促进视频全站仪的研发,使得全站仪既可以巧妙结合了传统的全站仪和数码相机,还可以很好地做到了在精准地进行点位测量的同时兼顾面测量[2]。与此同时,对于室外测量点采集的三维坐标问题增加技术控制,实施室内智能控制,加强全站仪的测量的自动化程度,有效地规避采集造成了认为干扰,使测量更加准确。
2 近景摄影测量法
2.1系统原理、配置
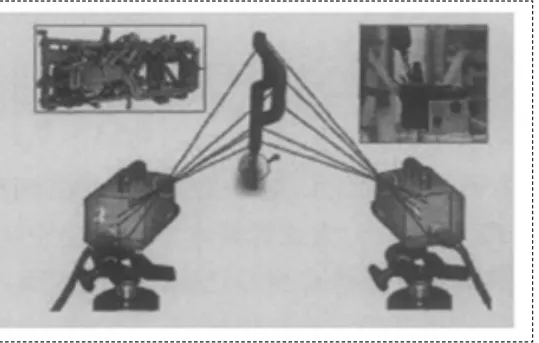
近景摄影测量获取待测点三维坐标的方式是首先针对同一个物体在多角度、多方位的获取数字图像,进而通过计算机对数字图像进行处理,并且对其实施相关数字计算,最终获得三维坐标[3]。该测量方法使用的原理是三角交会法,该原理和经纬仪原理相同。该原理如下图所示:
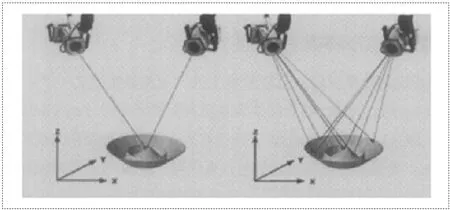
该系统的配置分为三种类型,第一种单机进行的脱机测量系统,第二种多台相机联合实施测量的系统,第三种是摄影基线固定的进行的整体式测量系统。
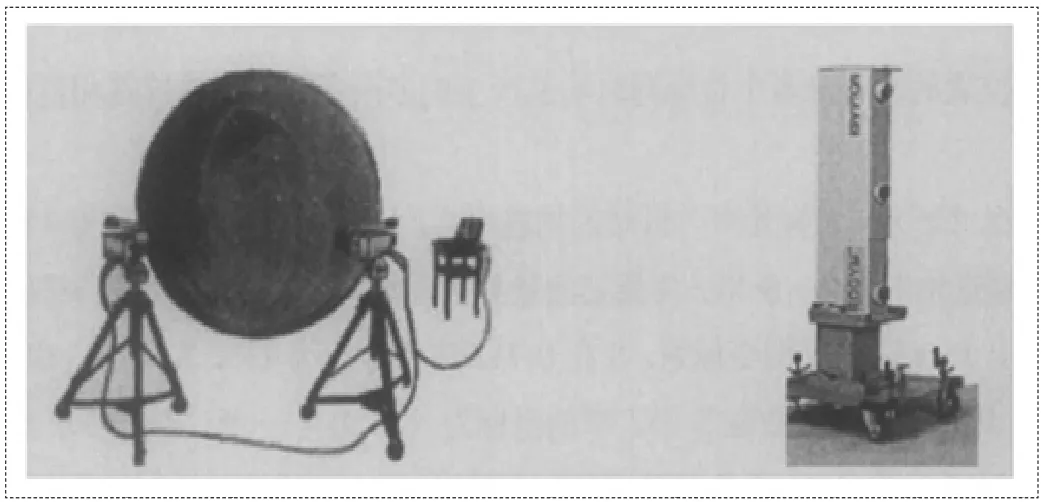
就目前而言,国内尚且不存在商业化的测量系统,商业化系统的生产主要存在于国外,以下两个系统分别是美国和挪威公司生产的。

V一STARS系统
Metronor系统
2.2近景摄影测量法在天线测量中的应用
天文事业发展要求天线反射面的精准度越来越来高,这也就导致测量系统需要有更高的精准度。对于近景摄影测量方式的实践应用最早出现在上世纪六十年代,当时主要实施校对和测试天线发射面的准确度[4]。目前阶段该测量方法对于天线的校准已经相当成熟,不同情况的天线均可以采取有效测量。甚至是美国的相关企业已经进行上百件的天线校准工作。而今,数字相机得到大面积应用,处理数字图像的技术也有了较大发展,近景测量系统也有了较大的改进,改进后的测量系统在微波天线等领域应用广泛。国内研究方面,该方法针对天线模胎进行的测量,精确度高于0.20mm。
3 测量数据处理
3.1坐标转换
3.1.1曲面自由拟合法
因为t的函数是x,y,z,所以t的函数同样也是F。由于(x,y,z)是不可知的,因此公式3-1代到公式3-2中,t和(x、y、z)的函数用F表示,测量点数n个,坐标为(Xn,Yn,Zn)使用迭代最小二乘法进行计算,就可以算出数据t,这样的算法就叫曲面自由拟合法。

3.1.2公共点转换法
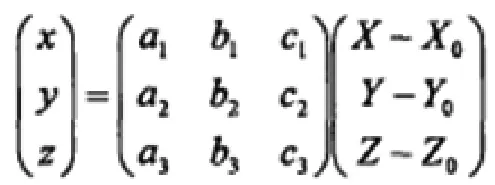
在天线最初设计的坐标点进行选取坐标点,进行实测,进而转换点和点之间的坐标。这样就出现两个坐标系,并且分别存在三个平移以及旋转后参数,记作,假设在测量坐标系下,公式如下:
3.1.3CAD面型转换法
这种方法直接把实例的离散点交换成设计的CAD曲面。这样的转换具体操作很简单,首先选择手动将坐标转换最初的数值进行输入,也可以选择计算各个公共点的转化法得出初值,其次在理论面上投影测量点,公共点设置在投影点,进而在公共点设计坐标,重新开始转换坐标,进而可以取得新的相关转换数据,再次是反复以上环节,直至对于CAD曲面来说测量点的点位精度最高,就可以结束了。在这个过程中可以得出两点,第一,天线的大致位置可以控制,第二,多次修正关于公共点的坐标,该系统的误差就渐渐变小,从而大大提高了公共点的精确度。
3.2表面精度
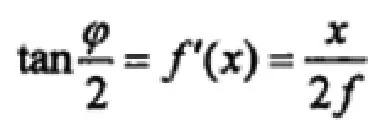
如下图可得,抛物线方程的标准公式χ2=4ƒz是抛物线面天线的方程,在抛物线中,设oz为旋转轴,以F点为焦点,将ρ’点作为实测点,ρ’点对应理论点为ρ, 过一点ρ形成法线为ρρ’’。我们可以从抛物线的性质求得,轴向与法线ρρ’’所形成的夹角φ/2,,公式为:
在坐标转换之后,在设计坐标下,点p’的坐标为(x,y,z),进行转化,进而在将其带到方程中,可以得出:

然后就得出沿点p’的在轴向方向偏移的量值为:

所以求得法向偏差ρρ’是:

此外,n点方向偏差计算公式如下。

最后求取天线表面精度。

表面精度以及法向偏差计算图
3.3测量数据三维显示
已知,z=f(x,y)是曲面,在MATLAB中,将函数z=f(x,y)假设定义在D=[xmin,xma]X[ymin,ymax]这样的矩形区域内部,矩形D分成小矩形块,共有mXn个小块,进而对网格点的函数值实施计算。而在空间上,所有小矩形都获得了四个顶点,再将四个顶点结合,出来三维的小矩形,以此类推,连接每一个小四边形就可以出现z=f(x,y)在空间上的网格曲面。
4 结语
本文主要研究成果是,介绍了全站仪测量系统以及应用,紧接着分析了近景测量法的影响因素,简要归纳了处理数据过程可以使用的方法,最后对天线模型进行了三维显示。
参考文献
[1]王宏建,郝齐焱,易敏,陈雪,刘广,刘世华,赵鑫.基于光学测量的大型天线测试方法研究[J].空间科学学报,2013,01:115-119.
[2]李干.大型天线安装测量与面型数据处理若干问题研究[D].解放军信息工程大学,2012.
[3]赵学维.基于图像测量的大型反射面天线的特征识别与分析[D].西安电子科技大学,2010.
[4]徐鹏.基于太阳噪声的雷达天线测量方法研究[D].哈尔滨工业大学,2013.