液压挖掘机参数化姿态控制系统
2016-03-22吕彭民吴玉文张蓓
吕彭民 吴玉文 张蓓
摘要:通过VB控制SolidWorks中液压挖掘机各液压缸长度参数,实现液压挖掘机姿态的参数化控制,并对模型的建立、系统的设定以及关键技术进行阐述。通过参数化姿态控制系统,在SolidWorks中自动装配出用户指定姿态的液压挖掘机几何模型,用户可以将该几何模型导入有限元软件Ansys中进行有限元分析,解决了有限元分析时挖掘机姿态难以调节的问题。
关键词:液压挖掘机;姿态;参数化;SolidWorks
中图分类号:U415.51文献标志码:B
Abstract: The length parameters of hydraulic cylinders in SolidWorks were controlled by VB in order to command the stance of hydraulic excavator. With this system, the geometric model of hydraulic excavator with the userspecified stance can be automatically assembled in SolidWorks. The users can import the geometric model above into the software Ansys to carry out the finite element analysis. The system solves the problem that the stance of hydraulic excavator is difficult to change during the finite element analysis.
Key words: hydraulic excavator; stance; parameterization; SolidWorks
0引言
在研究液压挖掘机载荷谱的过程中,通过对工作装置的运动、力学分析,总结出载荷力的传递规律,并在此基础上通过实际的载荷标定,建立载荷的回归方程,实现实时应力测试向载荷测试的转变[12]。在进行实际的载荷标定试验前,需要在有限元分析软件Ansys中对不同姿态的液压挖掘机仿真模型进行受力分析,模拟实际加载过程,建立在Ansys环境下的载荷的回归方程,从而预先验证试验方案的准确性。由于拟合载荷的回归方程需要大量的不同姿态的数据,所以需要对多种姿态的液压挖掘机仿真模型进行受力分析;而且,在液压挖掘机设计过程中,也需要对不同姿态的仿真模型进行受力分析;但是,在Ansys中准确控制液压挖掘机姿态是相对比较困难的,也会加大工作的重复性。
利用三维参数化技术,基于VB和SolidWorks设计了液压挖掘机参数化姿态控制系统。在装配过程中对相关配合进行参数化,得到液压挖掘机部件间不同的装配关系,实现对液压挖掘机姿态的参数化控制。通过此系统,可以在SolidWorks中自动装配出用户指定姿态的液压挖掘机几何模型,用户可以将该几何模型导入有限元软件Ansys中进行受力分析。
由于在拟合载荷的回归方程时需要把相关力的力臂作为一个输入量,因此需要得到各姿态下准确的力臂数值。力臂可以通过理论计算得出,但是对已建好的对应姿态的几何模型,具有直接测量最为方便。通过本系统,可以快速建立对应姿态的液压挖掘机几何模型,并利用SolidWorks的良好操作性的测量功能,直接测得相关力臂,准确而且方便、快捷。
1基于VB的SolidWorks二次开发
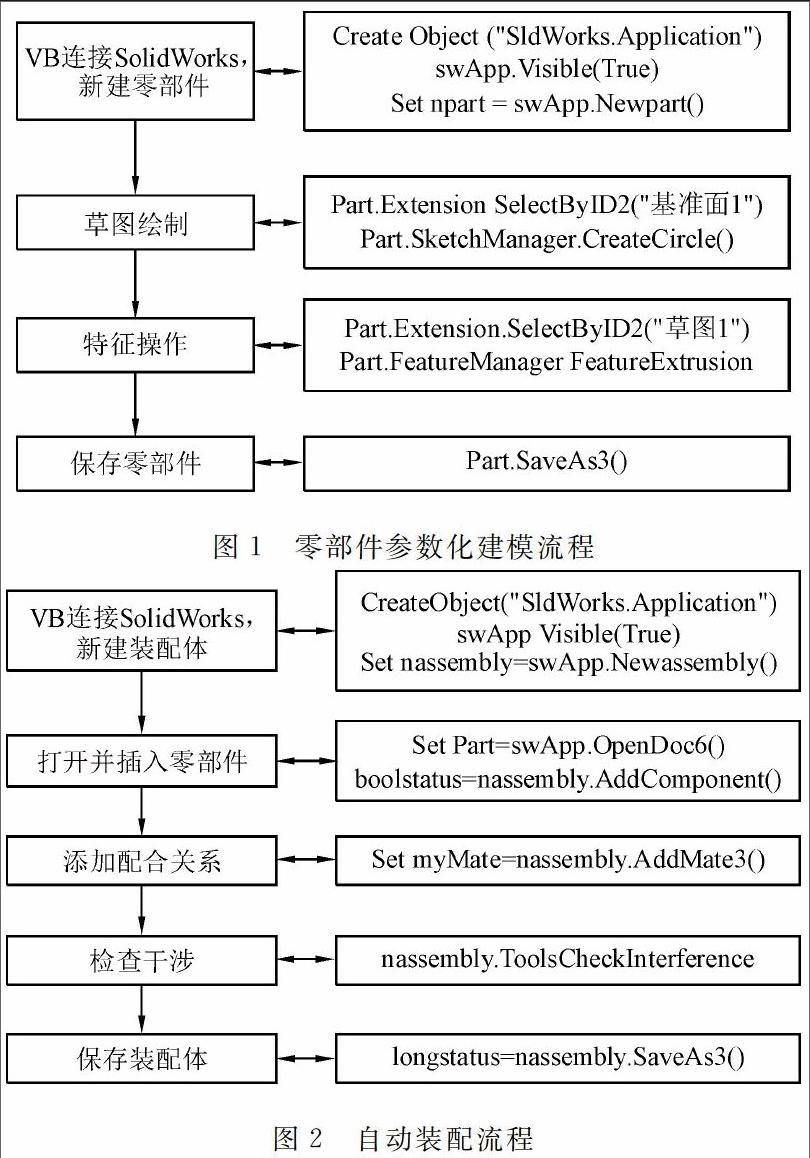
1.1基于VB的SolidWorks零部件参数化建模
以圆柱体零件为例,其参数化建模流程如图1所示。
1.2基于VB的SolidWorks自动装配
自动装配过程主要包括以下几个步骤:VB连接SolidWorks,新建装配体;插入零部件;添加配合关系;检查干涉;完成装配并保存[2]。自动装配流程如图2所示。
2参数化姿态控制系统的建立
2.1模型的建立
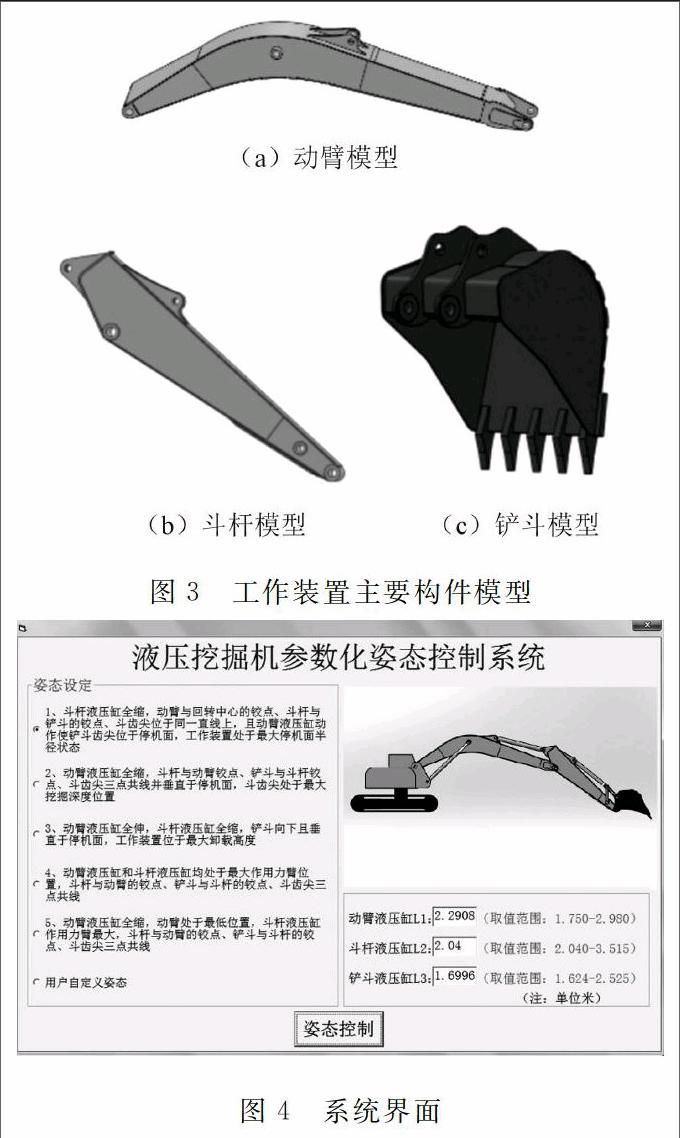
利用三维软件SolidWorks建立挖掘机工作装置、回转平台和底架的三维模型。工作装置由动臂、斗杆、铲斗和相应的液压缸组成。工作装置主要构件模型如图3所示。
在建立三维模型时,要考虑在有限元中分析时的要求。为减小有限元分析的计算量,在保证挖掘机工作装置、回转平台和底架的力学性能的基础上,根据上述部件的结构特点进行简化[3]。
(1) 忽略螺纹孔和对结构应力分布影响很小的倒角、运输吊耳、细微的斜面等。
(2) 由于动臂、斗杆、回转平台等部件都是焊接结构,在建模过程中,将焊缝处做连续处理,其材料与母材做相同处理。
(3) 由于在研究载荷谱时主要是对工作装置进行受力分析,因此回转平台和底架也做了相应的简化处理。
(4) 液压挖掘机工作装置的各部件是通过销轴相连,通过销轴在各部件之间传递力和运动,在对工作装置进行整体有限元分析时要进行铰接的处理。推荐选用梁单元BEAM188模拟销轴,并通过节点耦合的方法对铰接进行模拟。在有限元分析中通过SECTIONS定义不同半径的实心圆模拟不同半径的销轴。在模拟铰接时需要对UX、UY、UZ、RTOX、RTOY五个自由度进行约束,释放Z方向的旋转自由度[4]。所以,未在SolidWorks中直接建立销轴模型。
2.2系统的设定
如图4所示,系统界面主要由3部分组成,左侧为姿态设定区,右上部为对应姿态的图像展示区,右下部为液压缸长度输入区。
在液压挖掘机实际作业过程中,存在多种挖掘姿态,需要注意液压挖掘机最危险的姿态,以免因出现工作装置部件的断裂造成重大损失。液压挖掘机在实际工作过程中,各液压缸之间可实现不同的组合,挖掘姿态可达数万种。
在姿态设定区设置了6个Option单选控件,Option1~Option5对应上述的5种典型液压挖掘机姿态,Option6对应用户自定义姿态[56]。如图4所示,在运行程序时,当选定Option1时,右侧Image控件载入Option1所对应的姿态图片。此时,在液压缸长度输入区会自动显示出Option1对应的典型姿态的各液压缸长度,最终自动在SolidWorks中形成图4图像展示区所示姿态的液压挖掘机装配体模型。
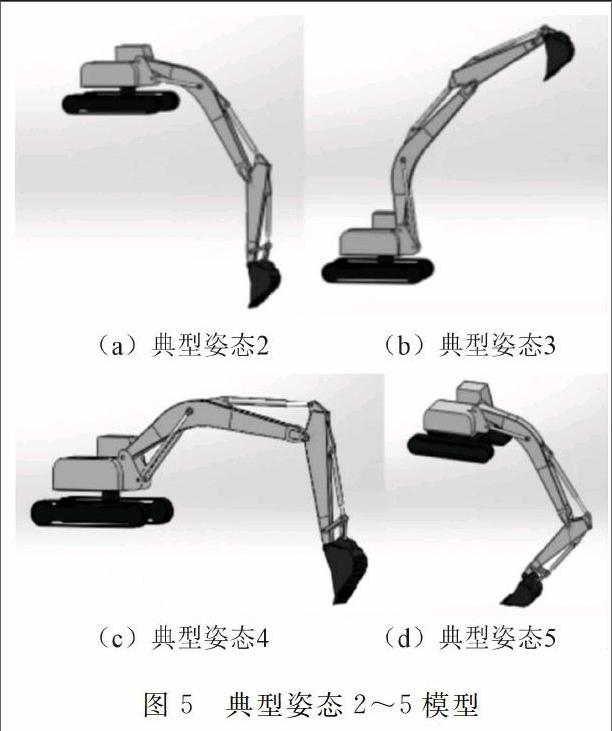
同理,当选定Option2~Option5时,Image控件载入对应的姿态图片,在液压缸长度输入区会自动显示出对应的典型姿态的各液压缸长度,最终自动在SolidWorks中形成如图5所示的相应姿态的液压挖掘机装配体模型。当选定Option6时,为用户自定义姿态,用户在液压缸长度输入区指定位置输入各液压缸长度,最终自动在SolidWorks中形成用户指定姿态的液压挖掘机装配体模型。
2.3系统的关键技术
系统程序运行主要包括几个步骤:VB连接SolidWorks,打开各液压缸子装配体;在各液压缸子装配体中添加参数化的距离配合关系(若程序非首次运行,则首先自动删除上次调节姿态过程中添加的参数化的距离配合关系,再重新添加);检查干涉;完成各液压缸子装配体的装配并保存;打开液压挖掘机整机装配体,并重建模型;检查干涉;完成整机装配体的装配并保存。下面以动臂液压缸子装配体和整机装配体相关主要程序为例进行解释。
(1) 动臂液压缸子装配体主要相关程序:
Set nassembly = swApp.OpenDoc6
("D:\\he\\boom cylinder.SLDASM",……)/打开动臂液压缸子装配体
boolstatus = nassembly.Extension.
SelectByID2("距离1", "MATE",……)
nassembly.EditDelete/选中上次调节姿态过程中已添加的参数化的距离配合关系,并删除
boolstatus = nassembly.Extension.
SelectByID2("Point1@原点",……)/选中动臂液压缸缸筒零件原点(在前期装配过程中,已将缸筒零件原点与子装配体原点重合)
boolstatus = nassembly.Extension.
SelectByID2("Point1@原点@cylinder rod1@boom cylinder",……)/选中动臂液压缸活塞杆零件原点
Set myMate = nassembly.AddMate3(5, 1, False, Val(Text1.Text),……)/将上述2个原点作为对象添加参数为Val(Text1.Text)距离配合关系
nassembly.EditRebuild3/重建模型
nassembly.ToolsCheckInterference/检查干涉
longstatus = nassembly.SaveAs3
("D:\\he\\boom cylinder.SLDASM", 0, 2)/保存动臂液压缸子装配体
(2) 整机装配体主要相关程序:
Set nassembly = swApp.OpenDoc6
("D:\\he\\he.SLDASM",……)/打开整机装配体
nassembly.EditRebuild3/重建模型
nassembly.ToolsCheckInterference/检查干涉
longstatus = nassembly.SaveAs3
("D:\\he\\he.SLDASM", 0, 2)/保存整机装配体
3结语
本文首先分析了基于VB的SolidWorks二次开发技术。此项技术是一种三维参数化建模技术,实用价值高,有助于减少设计人员的工作量,提高产品研发效率。文章将此项技术应用于工程实际,对液压挖掘机参数化姿态控制系统进行了研究和开发。实践证明,该系统有以下特点。
(1) 实现了液压挖掘机姿态控制的程序化和自动化。
(2) 操作简单,能方便快捷地帮助用户准确地参数化控制液压挖掘机姿态。
(3) 在相关研究中可以充分利用SolidWorks测量等其他功能。
(4) 可以服务于液压挖掘机载荷谱的研究和挖掘机的设计工作,满足了相关工程的实际需要。
(5) 开发思路可以应用于其他需要大量重复性数据的工程研究。
参考文献:
[1]滕毅敏.挖掘机工作装置的载荷谱测试研究[D].杭州:浙江大学,2011.
[2]陈进,庆飞,庞晓平.基于作业路径的液压挖掘机挖掘性能[J].长安大学学报:自然科学版,2014,34(2):115119.
[3]易炳刚,汪雪.基于VB的SolidWorks自动装配技术研究[J].机械工程及自动化,2013(1):9496.
[4]杜文婧.液压挖掘机工作装置设计关键技术研究[D].长春:吉林大学,2007.
[5]凌桂龙,沈再阳.ANSYS结构单元与材料应用手册[M].北京:清华大学出版社,2013.
[6]刘本学.液压挖掘机反铲工作装置的有限元分析[D].西安:长安大学,2007.
[责任编辑:王玉玲]
