盾构隧道施工中盾构机姿态控制
2016-03-21王鹏
王 鹏
中铁隧道股份有限公司
盾构隧道施工中盾构机姿态控制
王 鹏
中铁隧道股份有限公司
我国科学技术的迅猛发展,让交通地铁建设也进入了高速发展的过程中,地铁施工技术的安全性是公众关注度的重点话题。在近期,因为地铁施工项目增多,很多大盾构隧道施工中会出现各类施工问题,如果不能及时的处理,就会给施工带来诸多的问题,增加了施工的复杂性。而这些问题的出现很大部分是由于盾构隧道施工中盾构机姿态的控制问题所造成的,对此,本文笔者将着重分析探讨盾构隧道施工中对盾构机姿态的有效控制。
隧道;盾构机;姿态
1 盾构隧道施工中盾构机自动导向
盾构机自动导向系统的姿态定位主要是依据地下控制导线点来精确确定盾构机掘进的方向和位置。首先在控制点上安置好全站仪,输人测站坐标和后视点坐标,瞄准后视点进行定向,再利用全站仪自动测出ELS棱镜的坐标(即X,Y,Z)。激光束射向ELS就可以测定激光相对于ELS平面的偏角,在ELS人射点之间测得的折射角及入射角用于测定盾构机相对于隧道设计轴线(DTA)的偏角。坡度和旋转直接用安装在ELS内的倾斜仪测量。通过全站仪测出的与ELS之间的距离可以提供沿着DTA掘进的盾构机的里程长度。所有测得的数据由通信电缆传输至计算机,通过软件组合起来用于计算盾构机轴线上前后两个参考点的精确的空间位置,并与隧道设计轴线(DTA)比较,得出的偏差值显示在屏幕上,这就是盾构机的姿态。在推进时只要控制好姿态,盾构机就能精确地沿着隧道设计轴线掘进,保证隧道顺利准确地贯通。
现在的盾构机都装备有先进的自动导向系统,本区间盾构机上的自动导向系统为德国VMT公司的SLS-T系统,主要由以下四部分组成:1)具有自动照准目标的全站仪。2)ELS(电子激光系统),亦称为激光靶板。这是一台智能型传感器,接收全站仪发出的激光束,测定水平方向和垂直方向的人射点。3)计算机及隧道掘进软件。SLS-T软件是自动导向系统的核心,它从全站仪和ELS等通信设备接收数据,盾构机的位置在该软件中计算,并以数字和图形的形式显示在计算机的屏幕上。4)黄色箱子。它主要给全站仪供电,保证计算机和全站仪之间的通信和数据传输。
2 盾构推进中的姿态变化
2.1 盾构姿态参数
盾构姿态参数,是施工中反馈回来的盾构的状态参数,主要包括刀盘切口的水平、竖向偏差量和中盾尾部的水平、竖向偏差量以及盾构本体前后的偏差比值。盾构状态参数通过激光导向系统(VMT)实时动态监测,并提供完整的隧道掘进记录。施工中若发现盾构姿态偏离设计轴线,则需进行盾构姿态调整。
盾构刀盘切口、中盾尾部的水平及竖向偏差量是施工过程中较为重要的参数,直观地反映了盾构在推进过程中相对轴线的偏差量。现定义竖向、水平向的偏差量方向以坐标正方向为正,如图1所示。
以某盾构区间施工为背景,整理盾构在该区间掘进过程中切口、中盾尾部的水平及竖向的偏差量,如图2所示。
通过上述实测水平、竖向偏差量的整理发现,整体上盾构刀盘切口和中盾尾部的竖向偏差量变化趋势是一致的,即切口或中盾尾部的竖向偏差量可以代表盾构的竖向偏差状态;而2个位置的水平偏差量差别较大,从切口位置可以看出盾构水平向以设计轴线为中心,处于不断调整中。(见图4、图5)
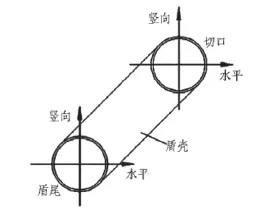
图1 坐标方向示意图

图2 盾构切口竖向偏差量

图3 盾构中盾尾部竖向偏差量
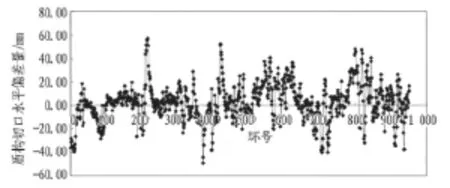
图4 盾构切口水平偏差量

图5 盾构中盾尾部水平偏差量
在盾构的掘进过程中,姿态调整对于施工来说非常重要,直接影响到盾构施工质量以及后续隧道的运营安全。1.2盾构姿态变化过程盾构的推进是一个动态过程,作用在盾构上的力可分解为前进方向的推力、水平方向的扭矩和竖向的扭矩。推力使得盾构向前推进,水平及竖向的扭矩使盾构姿态发生变化,这种变化包括角度的变化和位置的变化,如图6和图7所示。盾构角度的变化是指盾构与设计轴线的夹角变化,位置变化指盾构形心相对于设计轴线的偏移。
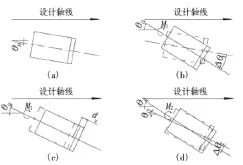
图6 角度变化图
角度的变化可用如下过程表示:1)盾构与设计轴线之间的初始夹角为θi0(i=y,p),下标y表示水平方向,p表示竖直方向;2)在推进油缸产生的纠偏扭矩作用下,盾构角度变化到θi1(i=y,p);3)以此角度向前推进dz;4)盾构的受力平衡状态被打破,角度发生变化至θi2(i=y,p)。
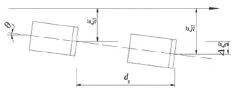
图7 位置变化图
盾构的位置偏离变化量为:

由上图可以看出位置的变化受到角度的控制,只有盾构与设计轴线之间有夹角时,才可能发生位置的变化。
3 不同地质环境中盾构机掘进姿态控制
3.1 泥质土层
盾构机在软弱土层中掘进时,由于地层自稳定性能极差,为控制盾构机水平和垂直偏差在允许范围内,避免盾构机蛇形量过大造成地层的过量扰动,宜降盾构机掘进速度控制在30-40mm/mm之间,刀盘转速控制在1.5r/mm左右。在该段地层中掘进时,四组千斤顶推力应较为均衡,避免掘进过程中千斤顶行程差过大,否则,可能会造成推力轴线与管片中心轴线不在同一直线上在掘进过程中应根据实际情况加注一定量的添加剂,以保持出土顺畅,尽量保持盾构机的连续掘进,同时要严格控制同步注浆量,以保证管背间隙被有效填充。
3.2 砂层
盾构机在全断面富水砂层中掘进,由于含水砂层的自稳能力极差,含水量大,极易出现盾构机“磕头”现象,同时,在含水砂层中盾构机也易出现上浮现象。为避免盾构机在含水砂层中掘进出现“磕头”现象,在推进过程中盾构机应保持向上抬头的趋势,如果发现有“磕头”趋势,应立即调节上下部压力,维持盾构机向上的趋势。为避免盾构机在含水砂层中掘进出现上浮现象,在盾构机掘进时应减小刀盘转速,减小对周围砂层的扰动。
3.3 岩层层面起伏大
岩层层面起伏大会导致隧道开挖面内的岩层出现软硬不均。盾构机在这种地层中掘进,其盾构机的姿态控制难度大,易产生盾构机垂直方向上的过量蛇行,造成管片错台及开裂。以上软下硬地层为例,在这类地质条件下掘进,盾构机刀盘受力不均,掘进速度不均衡,这就要求在掘进过程中,必须时刻勘察测量系统提供的盾构机姿态数据,结合推进千斤顶和铰接千斤顶的行程差值,不断地调整各分区千斤顶的推力及总推力,以保持盾构机姿态的平稳如果不注意调整推进千斤顶的行程差,就会造成管片选型变化大,甚至造成过小的盾尾间隙使管片脱出盾尾。因此,在推进过程中不能单一的只注意测量系统所提供的盾构机姿态来指导掘进,还应记录各分区千斤顶的行程差。
3.4 全断面硬岩地层
全断面硬岩地层属于均一岩层,盾构机在该类地层中掘进,其轴线姿态能较好地控制,在掘进时保持各分区千斤顶推力均匀,总推力和掘进速度均匀,即可保持盾构机较好的姿态。
总而言之,随着我国城市现代化程度的不断提高,越来越多的城市都加快了地铁的建设步伐,盾构机的正常推进对地铁的顺利建设又起着至关重要的作用。这就要求我们在以后的实际工作中必须对其实现进一步研究探讨。
[1]阳东升.盾构隧道施工中盾构机姿态控制[J].科技信息(学术研究),2007,14:242.
[2]谈小龙,朱伟,秦建设,杉本光隆.盾构法隧道施工中盾构控制滞后效应的研究[J].地下空间,2004,01:36-40+139.
[3]杨哲峰.苏州地铁盾构近接施工力学机理与控制技术研究[D].中国地质大学,2015.
