高压巡检机器人H∞鲁棒控制器设计
2016-03-21沈阳工业大学电气工程学院沈阳110870
邵 嶽(沈阳工业大学电气工程学院,沈阳 110870)
高压巡检机器人H∞鲁棒控制器设计
邵嶽
(沈阳工业大学电气工程学院,沈阳110870)
摘要针对巡检机器人易受恶劣作业环境及各种扰动影响难以控制的问题,基于机器人的动力学方程,通过设计合理的控制力矩,推导出机器人在有扰动情况下系统误差的状态空间模型,基于此模型利用线性矩阵不等式(LMI)和H∞理论对机器人进行了鲁棒控制分析,设计了机器人鲁棒H∞控制器,给出了H∞控制器存在的条件和求取方法,求出了机器人的状态反馈控制器,最后在Matlab/Simulink环境下对机器人的机械臂进行了轨迹跟踪仿真,结果表明本文所设计的鲁棒控制器能够满足巡检机器人机械臂响应快速、跟踪准确、系统稳定、抗扰动效果好的设计要求。
关键词:巡检机器人;误差状态空间模型;H∞理论;鲁棒控制
Design of High Voltage Inspection Robot H∞Robust Controller
Shao Yue
(School of Electrical Engineering, Shenyang University of Technology, Shenyang110870)
Abstract In response to the controllable difficulty of the inspection robot vulnerable to the harsh operating environment and all kinds of disturbance, a robots error state space mode under the condition of disturbances was deduced from the robot dynamic equations and rational design of control moment. Based on the model, a new robot robust controller and the state feedback controller of the robot were proposed according to the linear matrix inequalities (LMI) and the robust control analysis. And the existence conditions and the solving method of the controller were given. Furthermore, the simulation to the robot manipulator trajectory based on the Matlab/Simulink environment show that the proposed robust controller can satisfy the design requirements of inspection robot manipulator rapid response,tracking accuracy, system stability and anti-disturbance.
Keywords:inspection robot; error state space mode; H∞theory; robust control
检机器人是一种沿高压架空输电线路行驶并代替或辅助人工巡检的特种机器人,在国民生产和日常生活中占有重要地位,是保证电力部门的正常供电的关键,具有广阔的应用前景[1]。巡检机器人的有效控制是保证正常巡检的前提,机器人机械臂轨迹跟踪的响应速度和跟踪精度是实现机器人自主作业的关键,若响应速度过慢、跟踪误差过大或稳定性不好等都会导致一系列的问题,更严重的情况甚至会导致巡检机器人高空坠落的重大事故。因此研究巡检机器人的鲁棒控制具有重大实际意义。从控制的角度看,获取巡检机器人的控制模型是实施有效控制的第一步,但在实际工程应用中要想得到巡检机器人的精确模型是很困难的,在建模时通常需要做一些合理的近似处理,甚至忽略了一些不确定因素;此外巡检机器人高压强电磁干扰的作业环境等使得机器人的控制存在诸多不确定性的扰动,总之巡检机器人在作业过程中会受到来自自身和外界的多种干扰。这些不确定因素和扰动可能会引起系统控制品质的下降,甚至导致系统的不稳定。关于机器人的控制,目前相关文献已提出了基于专家系统[2]、模糊理论[3]、多智能体[4]、神经网络[5]、滑模变结构[6]等的多种控制方法,但这些大多数是针对移动机器人且研究工作是在忽略不确定性因素和扰动的理想情况下进行的,鲁棒控制是20世纪80年代专门针对控制系统的不确定性和扰动而发展起来的一种控制方法,当前针对移动机器人的鲁棒控制研究较多,如Bu Chi-wu, Xu Ke-fei[7]提出了转矩补偿的机器人鲁棒控制,谢明江[8]等人提出了基于H∞状态反馈的机器人鲁棒控制方法,李世敬[9]等人提出了基于动态观测器的不确定机器人鲁棒控制方法,赵浩泉[10]刘开周[11]等人分别提出了基于混合灵敏度和结构奇异值的水下机器人鲁棒控制方法,而在巡检机器人方面目前王鹏[12-13]等人在建立机器人机械臂各类动作运动模型的基础上提出了基于HJI不等式的架空输电线巡检机器人的鲁棒控制,其他的关于巡检机器人鲁棒控制研究特别少。基于上述文献的启发本文提出了一种基于H∞控制理论和机器人误差状态空间表达式的架空输电线巡检机器人的鲁棒控制方法,其控制目标是进一步提高巡检机器人在作业过程中的稳定性、准确性,增强机器人在作业现场的抗各类干扰的能力,实现巡检机器人在实际环境下的正常巡检作业。
1 巡检机器人的动力学建模
巡检机器人是一个多输入、多输出、多变量、强耦合、非线性系统,其控制是非常复杂的。理想情况下如果机器人的模型准确已知,且其位置和速度可精确检测的话,可通过非线性反馈补偿使得补偿后的系统呈线性关系,但实际上机器人的模型有很多不确定性因素,难以精确测定,此时只有通过相关理论和方法将巡检机器人的模型线性化,得出巡检机器人的线性化模型,再利用成熟的线性系统的控制方法对其实施控制是解决机器人非线性系统控制等复杂问题的一个有效手段。
1.1理想情况下巡检机器人动力学方程的线性化
在忽略摩擦和外界干扰等因素时一般机器人的动力学方程为

式中,q、q.、q..表示巡检机器人各关节的位置、速度、加速度,M(q)为惯性矩阵、C(q,q)为离心力和哥氏力的耦合项,G(q)为重力项,τ 为广义力矩。
为简化式(1)可令:H(q)= C( q, q.) q .+G( q)则式(1)可化为

设qd为巡检机器人的期望位置,则位置跟踪误差为e=q-qd,速度误差为e.= q .- q .d,加速度误差为.e.=q..-q..d,由.e.=q..-q..d得q..=.e.+q..d将其代入式(1)得

去括号得

若取适合的控制力矩

式中,V、P为速度、位置误差增益矩阵。
代入式(4)可得



式(7)是一个线性定常系统,没有控制输入量,系统本身就是稳定的,不需要反馈控制的作用。因此当机器人动力学模型为精确已知的时候,可以通过选择合适的广义控制力矩使得机器人控制系统保持稳定。
1.2扰动情况下巡检机器人动力学方程的线性化
在实际系统中,由于机器人不确定性因素的存在,很难得到式(7)描述的精确动力学模型。所谓不确定性指的是建模时没有考虑或者忽略的因素,对机器人建模而言,不确定性主要有两大类:
1)参数不确定如负载、机械臂连杆质量及连杆质心、长度、惯量等几何参数的不确定性。各种参数误差、各种忽略的动态特性等。
2)非参数不确定性高频未建模动,包括执行器动力学、结构共振及其连杆弹性等;低频未建模包括库仑摩擦、测量噪声,计算误差和采样延迟等。
此外机器人在实际运行中还会受到外部环境的干扰等,如高空风载情况下如何保持机器人的镇定等,我们将包括风载在内的影响机器人正常运行的所有因素统称为扰动,在扰动情况下的机器人控制问题更具有实际应用价值。设系统扰动影响的总和用d来表征,在有扰动的情况下机器人动力学方程式(1)可修正为式(8),即

若取适合的控制力矩

代入式(8)得

式(9)两边同时除以M(q),得

即

则系统的状态空间表达式为式(12)



2 鲁棒H∞控制理论
H∞控制理论是加拿大学者Zames于1981年提出的,它是鲁棒控制的一个重要分支,如图1所示为标准H∞控制的结构图。u为系统控制输入信号,w为扰动输入信号,z为被调输出信号,y为测量输出信号,P为被控对象,K为反馈控制,鲁棒控制的目标是设计状态反馈K,消除外界干扰对被控对象P的影响,使得被控对象P在有扰动w的情况下仍然能够正常工作。z到w的传递函数为Twz( s),如果K存在且能够使得最小,或者< γ(其中γ 是一个大于0的常数)则前者称K是P的最优H∞控制,后者为次优H∞控制。H∞控制的设计方法有基于LMI线性矩阵不等式和基于Riccati方程的求解方法,其中后者需要进行转化处理而前者可直接利用Matlab LMI控制工具箱求解,基于LMI 和Riccati方程的H∞控制器的存在性和求取方法由定理1、定理2、定理3给出。

图1 标准H∞控制结构图
当且仅当存在正定矩阵P满足线性矩阵不等式式(16)
设计状态反馈u= Kx后得到的闭环系统为

当且仅当存在一个对称正定矩阵X、W满足式(19)线性矩阵不等关系成立
则u=W*(X*)-1x就是系统式(17)的一个状态反馈H∞控制器,W*、X*是该矩阵不等式的一个可行解。
定理3:对于系统式(17)存在反馈控制器,使得闭环系统稳定且<1成立的充要条件是Riccati方程+= 0具有使A+)X稳定的半正定解X≥0。如果有解,则增益为K=- B2TX,满足要求的控制器为u=Kx。
3 巡检机器人H∞鲁棒控制器设计
结合1.2中已推导出的扰动情况下巡检机器人线性模型式(14),巡检机器人在有扰动情况下的系统状态空间可用式(20)来描述。

式中,第一个等式是1.2中推导出的巡检机器人在扰动情况下的线性模型式(14),第二个等式是人为控制的备调信号,由于基于LMI的H∞控制器求解方法在Matlab中更易于实现,下面将基于定理1和定理2设计状态反馈控制律u=Kx使得闭环系统

且系统渐近稳定,求出u=Kx即是巡检机器人控制系统式(20)的H∞鲁棒控制器。
闭环系统式(21)满足性能条件且系统渐近稳定则应满足定理1中的线性矩阵不等式(16)。修正式(16)中的A、C、D为A+BK、C+D1K、D2得式(22)
对矩阵不等式式(22)分别左乘右乘矩diag{P-1, I, I },可得
对比式(23)和式(19)可知X=P-1和W=KX即为式(19)的一个可行解,又闭环系统式(21)稳定,故矩阵P一定存在,所以巡检机器人控制系统式(20)的一个H∞鲁棒控制器为

利用Matlab LMI工具箱的求解器feasp求解标准线性矩阵不等式(22)、式(23)即可得到矩阵K,将其代入式(24)即可得到鲁棒控制律u的表达式。
4 仿真实验
巡检机器人轨迹跟踪是机器人控制的一个重要方面,轨迹跟踪控制目的是通过给定各关节的驱动力矩,使机器人的位置速度等状态变量能够跟踪到给定的期望轨迹,由于输电线路巡检机器人其作业环境的特殊性,对于机械臂的轨迹跟踪要求更高,如果不能实时跟踪到理想位置可能会导致一系列的问题,更严重的甚至会导致机器人从输电线上脱落的致命问题,因此解决巡检机器人的轨迹跟踪问题具有重要的实际意义,机器人速度和位置误差主要是机器人自身的因素以及外部干扰造成的,自身因素如行走电动机的转动误差,传动机构的老化;外部干扰因素如风载作用对机器人影响,强电磁干扰对行走电动机的影响等。理想情况下巡检机器人轨迹跟踪控制结构如图2所示。

图2 理想情况下机器人轨迹跟踪控制结构图
所以,可求得机器人状态反馈鲁棒控制器为

利用所设计的状态反馈H∞控制器在Matlab环境下搭建Simulink仿真平台如图3所示,设初始条件为q(0)=0Rad,给定机械臂的理想位置为典型正弦信号qd(t)=sin(2πt),则机械臂的理想速度为qd(t)=2πcos(2πt),在有扰动情况下对巡检机器人的两个机械臂,奇臂和偶臂的位置跟踪、速度跟踪在施加鲁棒控制前后进行仿真研究,仿真结果如图所示,图4为施加鲁棒控制前臂的位置和速度跟踪曲线,其中虚线表示臂的理想位置和速度,点线表示臂的实际位置和速度;图5至图8均为在施加鲁棒控制后的仿真曲线,其中图5、图6为奇臂、偶臂的位置和速度跟踪曲线,*表示期望位置曲线,×表示期望速度曲线,实线为实际位置和速度;图7为施加鲁棒控制前机械臂的位置和速度误差曲线,图8、图9为施加鲁棒控制后奇臂和偶臂的位置和速度误差曲线。
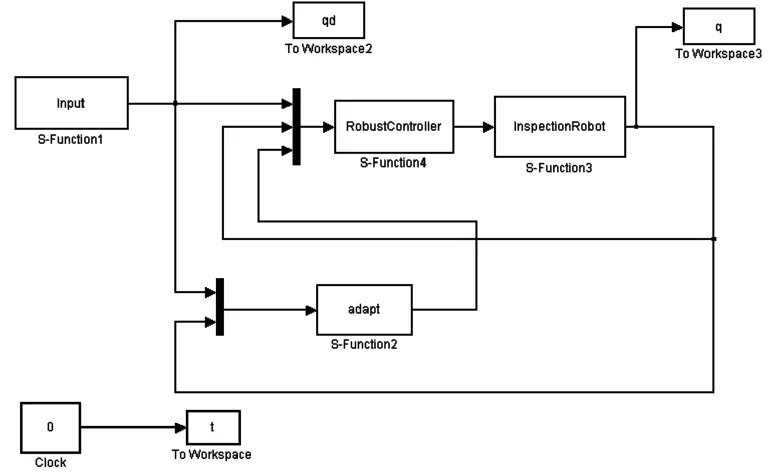
图3 巡检机器人Simulink仿真平台结构图

图4 施加鲁棒控制前臂位置和速度跟踪曲线
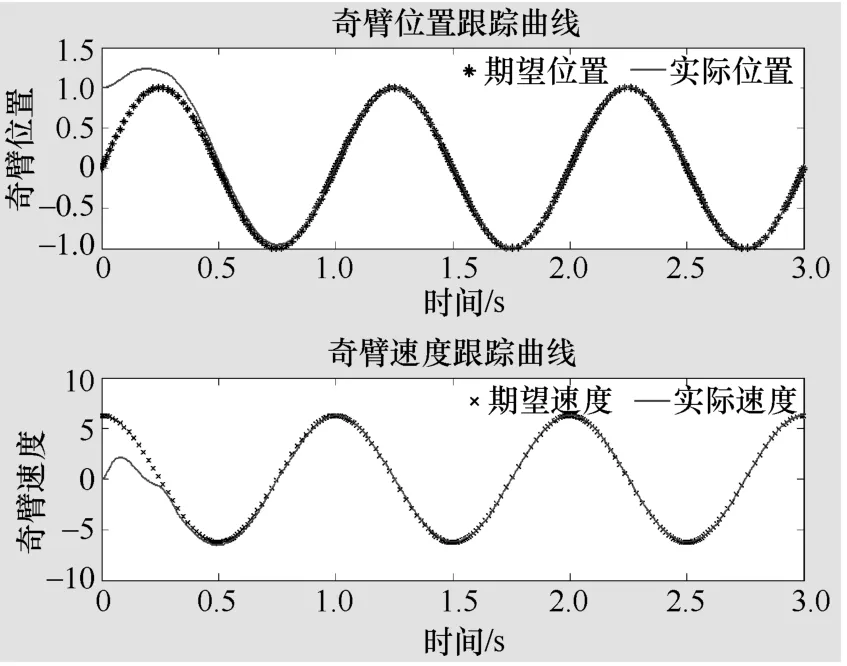
图5 施加鲁棒控制后奇臂位置和速度跟踪曲线
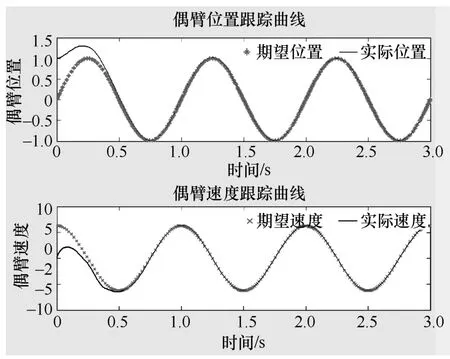
图6 施加鲁棒控制后偶臂位置和速度跟踪曲线
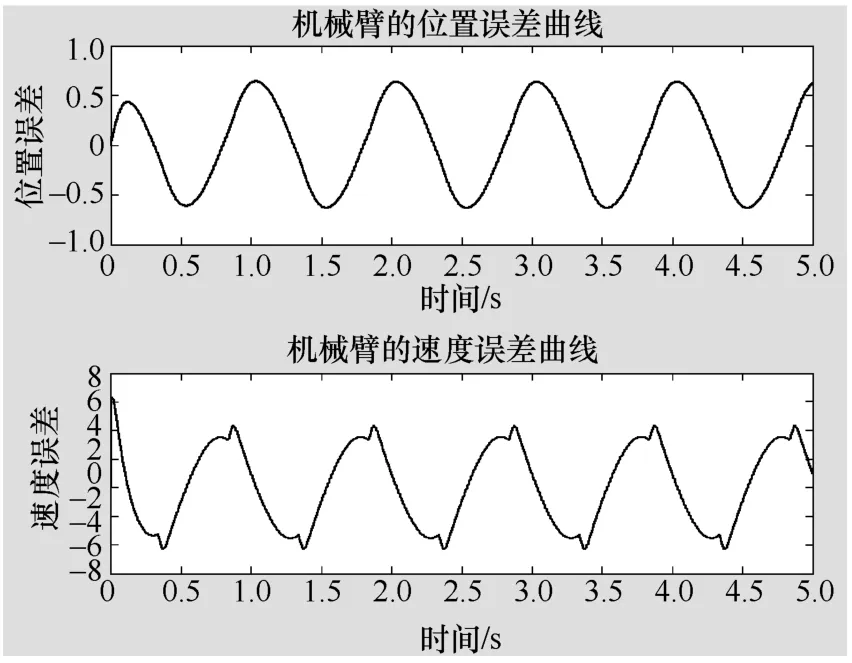
图7 施加鲁棒控制前机械臂位置和速度误差曲线

图8 施加鲁棒控制后奇臂跟踪误差曲线
为更清楚比较实施鲁棒控制前后,机器人机械臂的轨迹跟踪效果,由图4至图9仿真结果可得在不同控制方法下机械臂跟踪性能如表1所示。
仿真结果图4表明扰动存在且没有施加鲁棒控制时机械臂的实际位置很难跟踪到理想位置,图5、图6表明在施加鲁棒控制后,奇臂和偶臂实际位置在约1s后就可以逼近到理想位置,之后一直保持较好的跟踪性能;实际速度也是在约1s后就可以逼近到理想速度,之后也一直保持较好的跟踪性能;且奇臂和偶臂保持了很好的同步性。图7表明在施加鲁棒控制前机械臂的位置误差在+0.6~-0.6之间波动,速度误差在+6到-4之间波动,位置和速度误差都无法收敛到0,机械臂不能做到无差跟踪,图8、图9表明误差很快就收敛到0,证明其跟踪速度快,稳定性更强。从上述分析可以看出巡检机器人在有扰动的情况下采用本文所设计的H∞鲁棒控制律,机器人关节的实际位置和速度能够较好的跟踪到理想位置和速度,并且能够满足控制系统设计的快速性、准确性、稳定性的要求,因此本文的控制方法是有效的。

图9 施加鲁棒控制后偶臂跟踪误差曲线
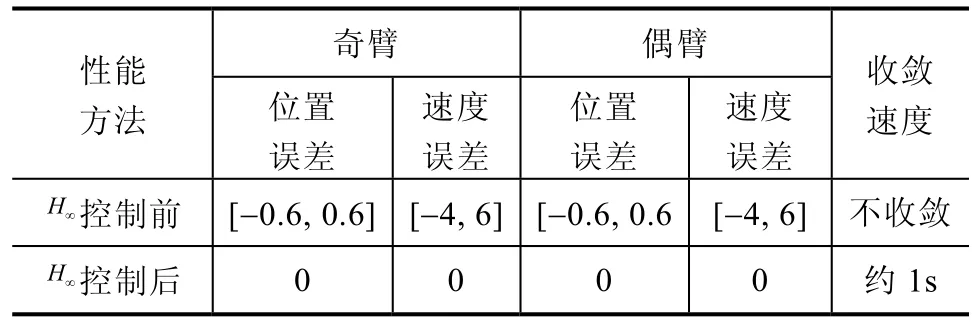
表1 施加鲁棒控制前后机械的跟踪性能
5 结论
本文基于H∞理论对架空高压输电线路巡检机器人鲁棒控制进行了研究,基于动力学方程推导出了误差的线性状态空间表达式,设计出了H∞鲁棒控制器,利用所设计的鲁棒控制器对巡检机器人机械臂的轨迹跟踪进行了仿真,结果表明了控制算法的有效性,这些对实际应用系统的设计都具有一定的应用价值。此外本文在研究过程中只考虑了扰动的综合,而没有考虑机器人动力学模型的不确定性,H∞控制过于强调鲁棒稳定性而忽略了系统对鲁棒性能的要求,这些问题可用鲁棒μ 方法来分析和处理,还有在保证机器人的稳定运行的前提下,使得机器人耗能更少,性能更优化,这些在本文中尚未提及还有待进一步研究。
参考文献
[1]张运楚, 梁自泽, 谭民. 架空输电线路巡检机器人的研究综[J]. 机器人, 2004, 26(5): 7-9.
[2]唐栎, 房立金, 王洪光, 等. 基于分布式专家系统的超高压输电线路巡检机器人控制系统的研究[J]. 机器人, 2004, 26(3): 267-271.
[3]郭伟斌, 王洪光, 姜勇, 等. 一种输电线巡检机器人的自动抓线视觉伺服控制[J]. 机器人, 2012, 34(5): 620-627.
[4]刘明尧, 谈大龙, 李斌, 等. 基于多Agent可重构机器人控制方法的研究[J]. 中国机械工程, 2002,10(20): 33-35, 4.
[5]房海蓉, 方跃法, 李昆, 等. 机器人的神经网络鲁棒轨迹跟踪控制[J]. 电机与控制学报, 2005, 9(2): 145-147.
[6]张文辉, 齐乃明, 尹洪亮. 基于滑模变结构的空间机器人神经网络跟踪控制[J]. 控制理论与应用,2011, 9(9): 1141-1144.
[7]Bu Chiwu, Xu Kefei. Robust control of Mobile manipulator service robot using torque compensation[C]//ITCS: 2009 INTERNATIONAL CONFERENCE ON INFORMATION TECHNOLOGY AND COMPUTER SCIENCE, PROCEEDINGS, VOL 2, PROCEEDINGS,2009: 69-72.
[8]谢明江, 代颖, 施颂椒. 基于非线性H∞状态反馈的机器人鲁棒控制[J]. 机器人, 2001, 23(2): 161-165.
[9]李世敬, 王解法, 冯祖仁, 等. 基于动态观测器的不确定机器人鲁棒控制研究[J]. 兵工学报, 2005, 26(2): 263-266.
[10]赵浩泉, 封锡盛, 刘开周. 基于混合灵敏度水下机器人的鲁棒控制研究[J]. 仪器仪表学报:自然科学版,2007, 28(8): 606-609.
[11]Liu Kaizhou, Guo Wei, Wang Xiaohui, et al. Research on the Structure Singular Value Robust Control of Underwater Vehicle[A]. Proceedings of the 8th World Congress on Intelligent Control and Automation, July 6-9 2010, Jinan, China.
[12]Wang Peng, Liu Feng, Mei Sheng wei, et al. transmission lines inspection robot[A]. Proceedings of the 29th Chinese Control Conference July 29-31, 2010,Beijing, China, 2010.
[13]王鹏, 刘锋, 梅生伟, 等. 高压输电线巡线机器人控制体系构建及动作控制器设计[J]. 清华大学学报(自然科学版), 2011, 51(7): 921-927.